MATEK M10-L4-3100 GPS Moduli - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS Moduli - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Couldn't load pickup availability
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS MAALUM
Tumia: Magari na Vifaa vya Kuchezea vya Udhibiti wa Mbali
Kupendekeza Umri: 12+y,14+y,6-12y
Asili: Uchina Bara
Nyenzo: Nyenzo Mchanganyiko
Jina la Biashara: MATEKSYS
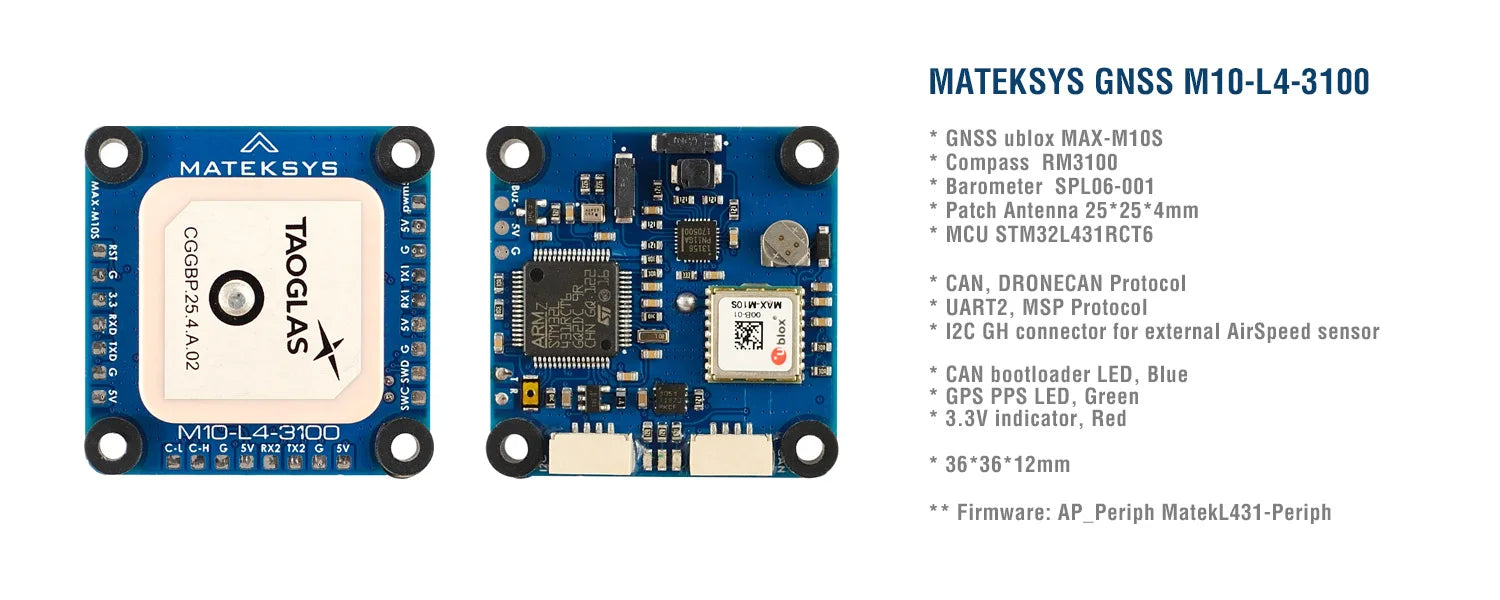
AP_PERIPH GNSS M10-L4-3100
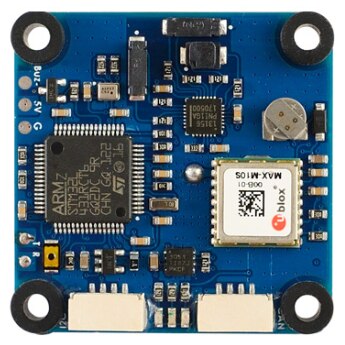
AP_Periph L431 nodi ya CAN, MAX-M10S, RM3100, SPL06-001, itifaki ya DroneCAN & UART_MSP
-
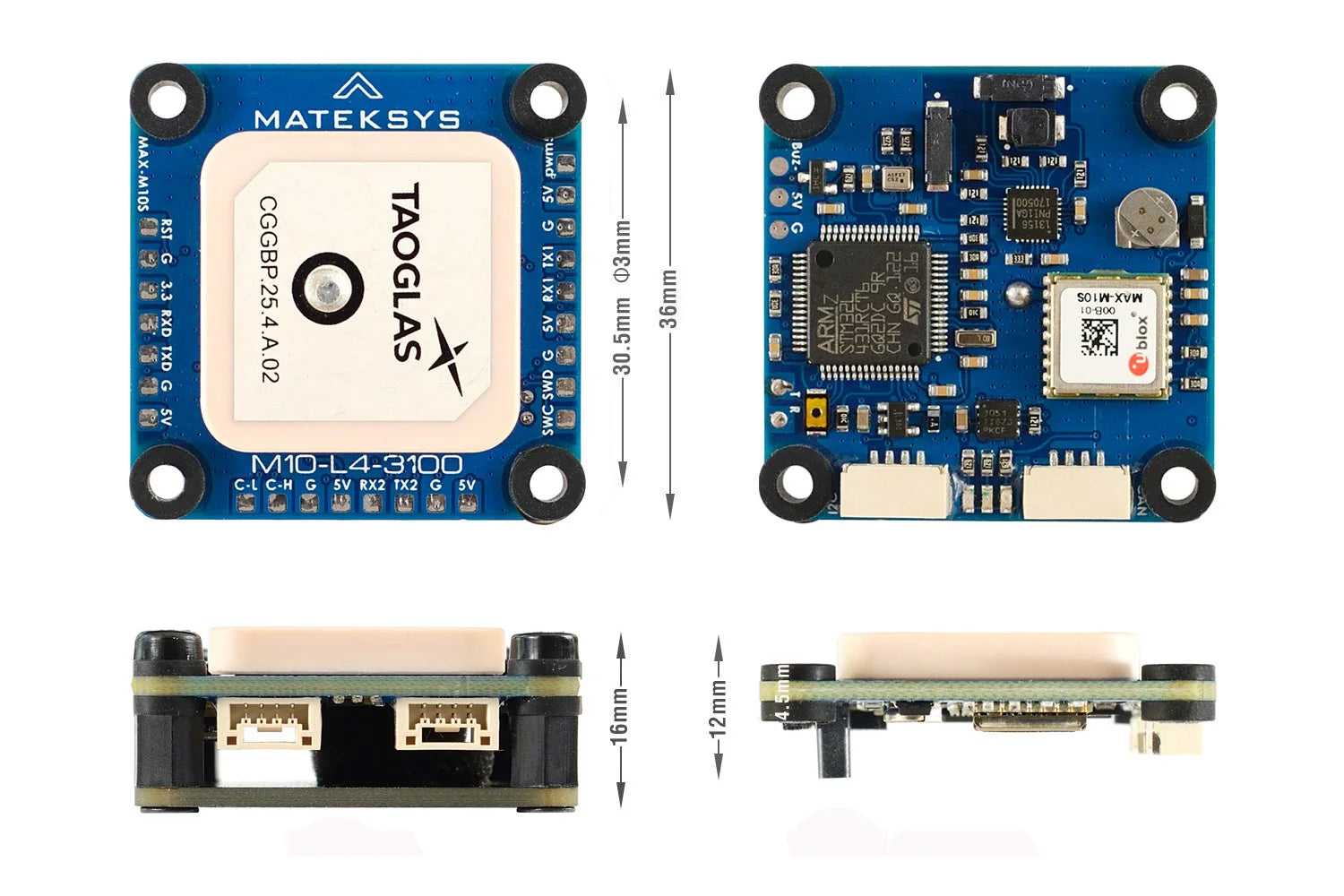
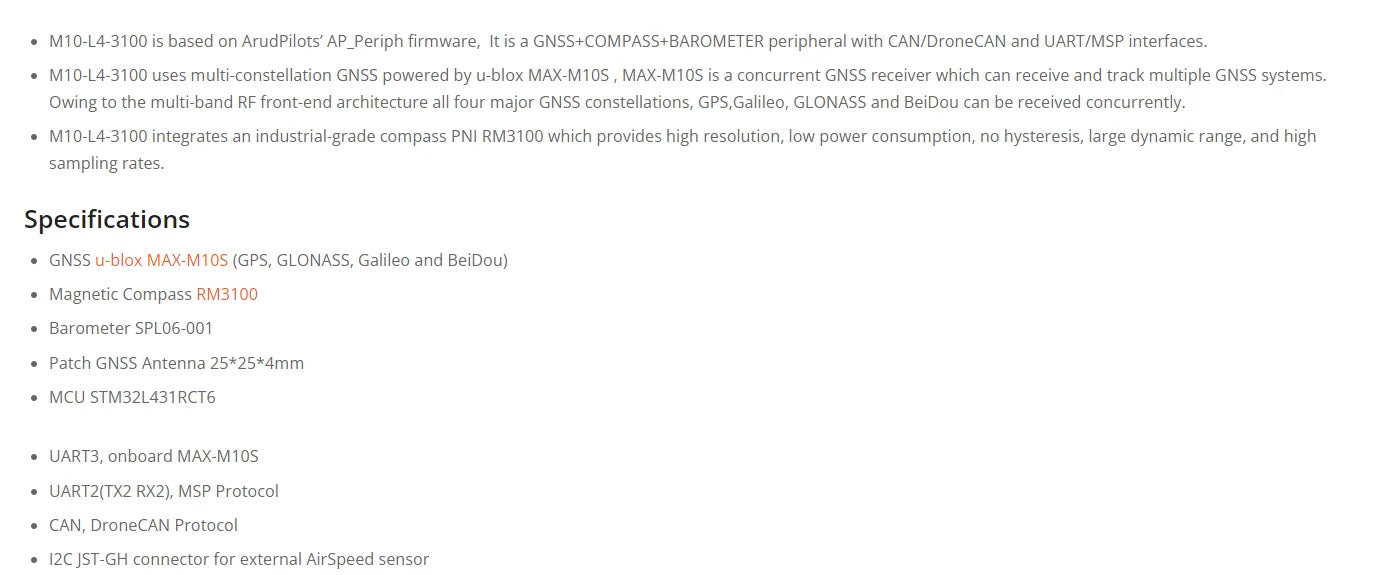
M10-L4-3100 inategemea programu dhibiti ya AP_Periph ya ArudPilots, Ni mfumo wa pembeni wa GNSS+COMPASS+BAROMETER wenye violesura vya CAN/DroneCAN na UART/MSP.
-
M10-L4-3100 hutumia makundi-nyota GNSS inayoendeshwa na u-blox MAX-M10S , MAX-M10S ni kipokezi cha GNSS ambacho kinaweza kupokea na kufuatilia mifumo mingi ya GNSS. Kutokana na usanifu wa sehemu za mbele za bendi za RF zote kuu nne kuu za GNSS, GPS, Galileo, GLONASS na BeiDou zinaweza kupokelewa kwa wakati mmoja.
-
M10-L4-3100 inaunganisha dira ya daraja la viwanda PNI RM3100 ambayo hutoa ubora wa juu, matumizi ya chini ya nishati, hakuna hysteresis, safu kubwa ya nguvu, na viwango vya juu vya sampuli.

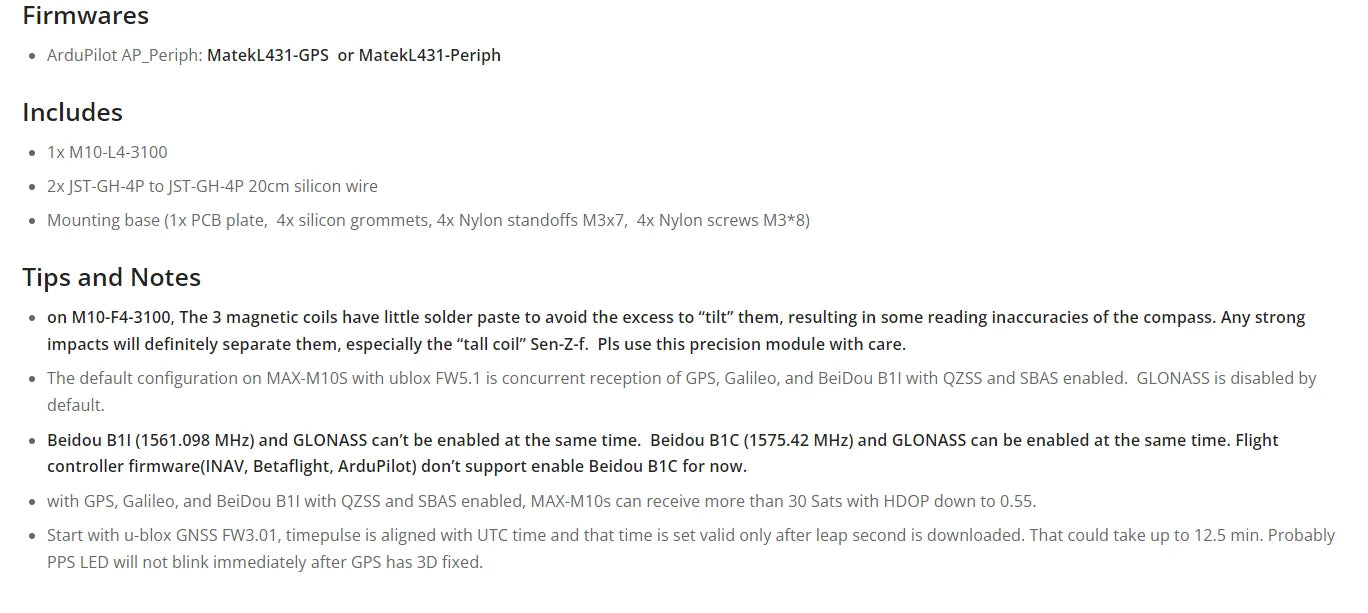
usanidi chaguo-msingi kwenye MAX-M1OS iliyo na ublox FWS . ni mapokezi ya wakati mmoja ya GPS, Galileo, na BeiDou BI na QZSS na SBAS zimewashwa . GLONASS imezimwa kwa chaguomsingi Beidou B1I (1575.42 MHz) na haiwezi kuwashwa kwa wakati mmoja .
Muunganisho wa CAN (Itifaki ya UAVCAN)
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L FC INAWEZA Chini
-
M10-L4-3100 G — FC G/GND
Vigezo vya FC UAVCAN(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DERIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (hakikisha DroneCAN Haijachaguliwa)
——————————————————————————
Ukiunganisha kihisi cha kasi ya anga cha I2C kwenye mlango wa I2C wa M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSDD_USE -> 1
Na lazima uweke vigezo vya CAN Node kwa kitambuzi cha kasi ya anga kilichounganishwa kwenye mlango wa I2C wa M10-L4-3100
Mission Planner > Usanidi wa Awali > Hiari maunzi > UAVCAN > Hali ya SLCan CAN1 > Vigezo
-
MS4525 ARSP_TYPE -> 1 (chaguo-msingi katika hwdef)
-
MS5525 ARSP_TYPE -> 3 inaauni MS5525 yenye anwani 0x77 pekee
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Andika na uwashe upya
——————————————————————————
Ukiunganisha 2812LED DIN kwenye pedi ya PWM5
-
NTF_LED_TYPES -> (hakikisha DroneCAN imechaguliwa)
Njia ya SLCan CAN1 > Vigezo
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw lazima iwe “MatekL431-Periph”, kipengele cha MSP kimezimwa katika “MatekL431-GPS”
17>
Muunganisho wa UART (MSP)
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC spare UART_RX
-
M10-L4-3100 RX2 — FC vipuri vya UART_TX (si muhimu)
-
M10-L4-3100 G FC G/GND
ArduPilot (tangu 4.1.x) Vigezo vya FC
-
Serialx_PROTOCOL = 32 (MSP) ambapo x ni mlango wa SERIAL unaotumika kuunganisha kwenye otomatiki.
-
Serialx_BAUD = 115 ambapo x ni mlango wa SERIAL unaotumika kuunganisha kwenye majaribio ya kiotomatiki.
-
GPS TYPE = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Ikiwa unataka kutumia baro ya MSP kama baro msingi, vinginevyo acha kama chaguomsingi)
-
COMPASS_TYPEMASK 0 (au hakikisha biti ya MSP haijaangaliwa)
INAV (tangu 2.6) Vigezo vya FC
-
M10-L4-3100 inaoana na kidhibiti chochote cha ndege kinachotumika na INAV kupitia UART ya ziada.
-
Katika kichupo cha milango, Washa MSP kwenye UART inayolingana ambayo M10-L4-3100 imeunganishwa, USIWASHE “GPS” kwenye UART hiyo. chagua Baudrate 115200.
-
kipengele GPS
-
weka gps_provider = MSP
-
set mag_hardware = MSP
-
weka baro_hardware = MSP
-
set align_mag = CW90, ikiwa dira imewekwa bapa huku mshale ukitazama mbele, na kishale cha kidhibiti cha angani kinatazama mbele pia.
Related Collections