


MATEKSYS H7A3-SLIM Kidhibiti cha Ndege - ICM42688P - 30x30
MATEKSYS H7A3-SLIM Kidhibiti cha Ndege - ICM42688P - 30x30
MATEKSYS
Couldn't load pickup availability
MATEKSYS H7A3-SLIM Kichanganuzi cha Ndege kinatoa utendaji wa juu katika muundo wa kompakt wa 30x30mm. Kina kipande cha STM32H7A3RIT6 MCU, processor ya 280MHz Cortex-M7, 1.4MB RAM, na 2MB Flash. Pamoja na ICM42688P IMU, SPL06-001 barometer, AT7456E OSD, na 128MB Flash Blackbox, kinatoa data sahihi na uandishi wa kutosha. Kichanganuzi kina UART 6, PWM 11, 1 I2C, 1 bandari ya CAN, na channel 4 za ADC. Pia kina LED tatu za hali, bandari ya USB Type-C, na pato la 9V linaloweza kubadilishwa. Pamoja na muundo wa kufunga wa 30.5 x 30.5mm, mashimo ya 4mm, grommets za 3mm, na uzito wa 7g tu, ni bora kwa mbio za FPV na kuruka kwa uhuru. Faili ya hatua ya 3D imetolewa kwa ajili ya uunganisho wa kawaida.
Vipengele
- On-Screen Display
- 30x30 Kuweka
- Muundo wa Compact
- Uunganisho
- Nyepesi
Mifano
Mifano
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) zikiwa na urekebishaji wa ndani.
- 11x PWM matokeo
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Current, VB2, Cur2)
- 3x LEDs kwa FC STATUS (Bluu, Nyekundu) na kiashiria cha 3.3V (Nyekundu)
- USB Aina-C(USB2.0)
- 8x PWM matokeo kwenye 2x JST-SH1.0_8pin kiunganishi kwa 2x 4in1 ESC
- 1x JST-GH1.25_4pin kiunganishi (5V/CAN-H/CAN-L/G)
- 9V pato ON/OFF linaloweza kubadilishwa
- Video ya kidijitali OSD inasaidiwa na UART yoyote ya ziada
Nguvu
- Vbat Ingizo: 6~36V (2~8S LiPo)
- BEC: 5V 2A endelevu. (Max.3A)
- BEC: 9V 2A endelevu. (Max.3A)
- LDO 3.3V: Max.200mA
- Hakuna Sensor ya Mvuto iliyojengwa ndani
- ADC VB2 pad inasaidia Max. 69V (mgawanyiko wa voltage: 1K:20K)
FC Firmware
- ArduPilot: MATEKH7A3 (4.6 au mpya)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Kuwasha na STM32CubeProgrammer
Kimwili
- Kuweka: 30.5 x 30.5mm, Φ4mm na Grommets Φ3mm
- Vipimo: 36 x 36 x 5 mm
- Uzito: 7g
- Hatua ya 3D H7A3-SLIM_step.zip
Ikiwa na
- 1x H7A3-SLIM
- 6x Grommets za Silicon M4 hadi M3
- 2x JST-SH1.0_8pin cable, 5cm, & 8pin connectors
- 1x JST-GH-4P hadi JST-GH-4P cable kwa port ya CAN, 20cm
Maelezo

MATEKSYS H7A3-SLIM flight controller inatumia STM32H7A3 MCU na ICM42688P IMU na port ya USB-C katika muundo wa usakinishaji wa 30.5mm.

MATEKSYS H7A3-SLIM flight controller inatumia muundo wa kompakt wa 30x30 na port ya USB-C na pads zilizoandikwa wazi kwa ajili ya wiring safi.

MATEKSYS H7A3-SLIM inatumia connectors mbili za JST-SH 1.0 8-pin pamoja na port ya JST-GH 4-pin na USB Type-C kwa wiring safi na usakinishaji rahisi.

MATEKSYS H7A3-SLIM inatumia pads za solder zilizoandikwa wazi na port kwa video ya kamera/VTx, UARTs, CAN, na muunganisho wa nguvu.
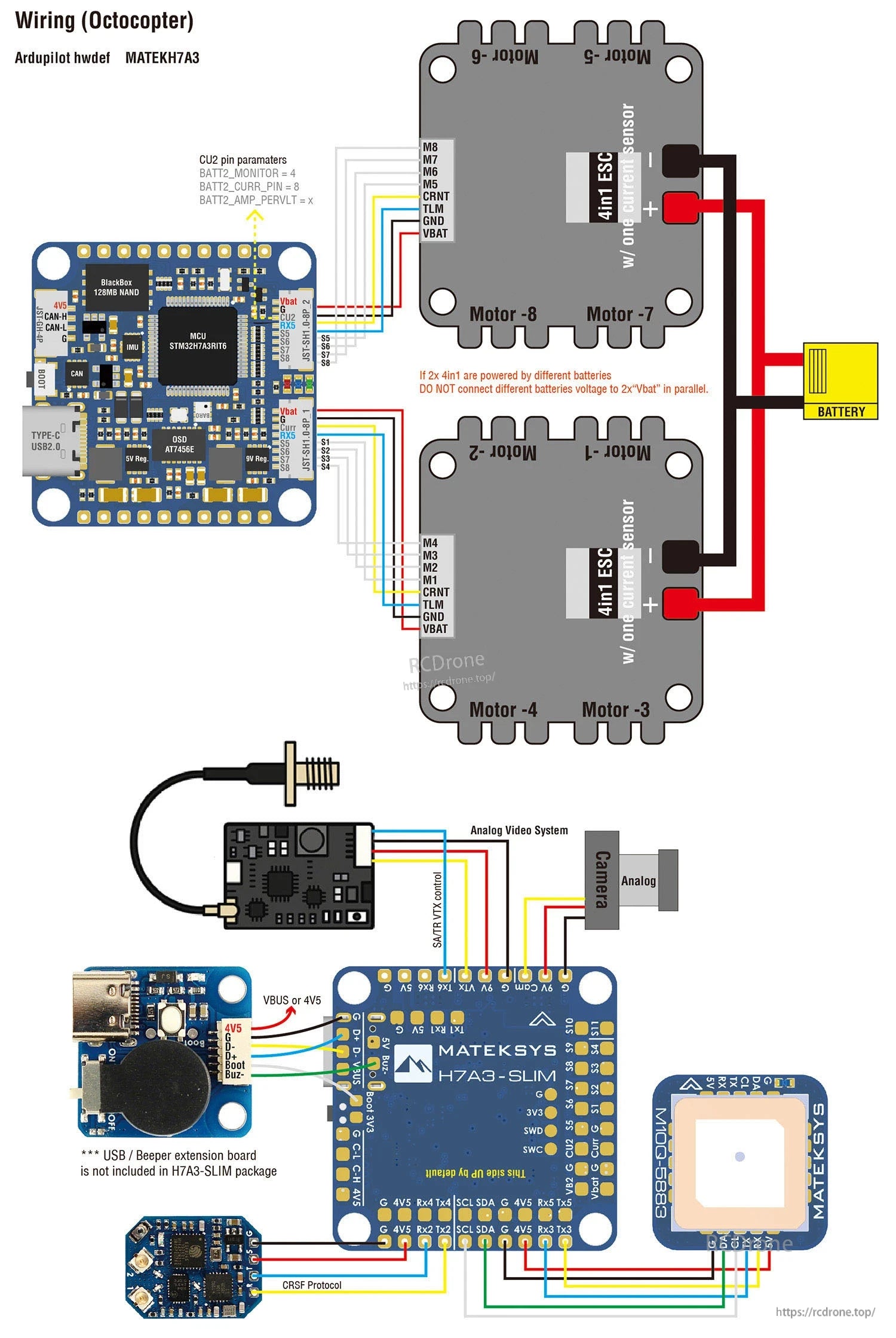
MATEKSYS H7A3-SLIM inatumia vidonge vilivyoandikwa wazi kwa kuunganisha ESCs mbili za 4-in-1, nguvu ya VBAT, GPS, mpokeaji, na vipengele vya video vya analojia.

Ramani ya ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O inayovumilia 5 V | TIM1_CH2 | DMA/Bi-DShot | Kikundi1 |
| S2 | PWM2 GPIO51 | I/O inayovumilia 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O inayovumilia 5 V | TIM2_CH1 | DMA/Bi-DShot | Kikundi2 | |
| S4 | PWM4 GPIO53 | I/O inayovumilia 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O inayovumilia 5 V | TIM3_CH3 | DMA/Bi-DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | 5 V tolerant I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V tolerant I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V tolerant I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V tolerant I/O | TIM4_CH1 | DMA/DShot | Group4 | |
| S10 | PWM10 GPIO59 | 5 V tolerant I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V inayovumilika I/O | TIM16_CH1 | DMA/DShot | Kikundi5 | |
| PWM1~PWM11 zina uwezo wa Dshot na PWM.Hata hivyo, kuchanganya Dshot na operesheni ya kawaida ya PWM kwa matokeo kunakabiliwa na vikundi, yaani, kuwezesha Dshot kwa matokeo katika kundi kunahitaji kwamba MATOKEO YOTE katika kundi hilo yawe yamewekwa na kutumika kama Dshot, badala ya matokeo ya PWM. Ikiwa servo na motor zimechanganywa katika kundi moja, hakikisha kundi hili linaendesha masafa ya chini ya PWM kulingana na spesifikas za servo. Hiyo inasema. Ikiwa Servo inasaidia Max. 50Hz, ESC lazima ikimbie kwa 50Hz katika kundi hili. |
||||||
| PINIO | 9V swichi | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat pad | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Curr pad | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | I/O inayovumilika 5V | bodi ya Baro SPL06-001 | Anwani | 0x76 |
| Kasi ya Hewa ya Kidijitali I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometer | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | I/O inayovumilika 5V | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
CAN GPS CAN Compass CAN Sensor wa Kasi ya Anga |
GPS_TYPE COMPASS_TYPEMASK ARSPD_TYPE |
9 0 8 |
| UART | USB | USB | console | SERIAL0_PROTOCOL | 2 | |
| TX1 RX1 | USART1 w/DMA | 5 V tolerant I/O | Telemetry | SERIAL1_PROTOCOL | 2 | |
| TX2 RX2 | USART2 w/DMA | 5 V tolerant I/O | RC input/Receiver | SERIAL2_PROTOCOL | 23 | |
| TX3 RX3 | USART3 w/DMA | 5 V tolerant I/O | GPS | PROTOKOLI YA SERIAL3 | 5 | |
| TX4 RX4 | UART4 bila DMA | I/O inayovumilia 5 V | Ziada | PROTOKOLI YA SERIAL4 | -1 | |
| TX5 RX5 | UART5 bila DMA | I/O inayovumilia 5 V | Ziada | PROTOKOLI YA SERIAL5 | -1 | |
| TX6 RX6 | USART6 bila DMA | I/O inayovumilia 5 V | Ziada | PROTOKOLI YA SERIAL6 | -1 | |
INGIZO LA RC
Ingizo la RC limewekwa kwenye USART2(SERIAL2).Inasaidia na itifaki zote za RC za serial. SERIAL2_PROTOCOL=23 kwa chaguo-msingi.
- PPM haisaidii.
- CRSF inahitaji muunganisho wa Tx2 & Rx2, na weka SERIAL2_OPTIONS kuwa “0” (chaguo-msingi).
- SBUS/DSM/SRXL inajitenga na pini ya Rx2, lakini SBUS inahitaji kwamba SERIAL2_OPTIONS iwekwe kuwa “3”.
- FPort inahitaji muunganisho wa Tx2, na weka SERIAL2_OPTIONS kuwa “7”. Ikiwa Telemetry haifanyi kazi, jaribu kuweka SERIAL7_OPTIONS = 135.
- SRXL2 inahitaji muunganisho wa Tx2, na inatoa telemetry kiotomatiki. Weka SERIAL2_OPTIONS kuwa “4”.
- UART yoyote inaweza kutumika kwa muunganisho wa mifumo ya RC katika ArduPilot pia, na inafaa na itifaki zote isipokuwa PPM. Tazama Mifumo ya Udhibiti wa Redio kwa maelezo zaidi.
ArduPilot Relay(PINIO)
- 9V pato ON kwa chaguo la msingi
- PC13 PINIO1 PATO GPIO(81) //9V nguvu switche.g.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 //Relay On/Off, Tumia CH7 ya Transmitter kuweka 9V ON/OFF
Kipengele kilichowekwa kitazinduliwa wakati thamani ya pwm ya swichi ya ziada inakuwa juu ya 1800. Kitazimwa wakati thamani inaporomoka chini ya 1200.
Angalia thamani ya pwm inayotumwa kutoka kwa transmitter wakati swichi iko juu na chini ukitumia Mipango ya Kwanza ya Mission Planner >> Vifaa vya Lazima >> skrini ya Kalibrishaji ya Redio.Ikiwa haipandi zaidi ya 1800 au chini ya 1200, ni bora kurekebisha mipaka ya mwisho ya servo katika kipokezi.
Related Collections


