




BetaFPV Matrix 1S Kidhibiti cha Ndege cha Brushless AIO 3IN1/4IN1, STM32G473, ELRS 2.4G, 12A/18A
BetaFPV Matrix 1S Kidhibiti cha Ndege cha Brushless AIO 3IN1/4IN1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
Couldn't load pickup availability
Muhtasari
Vipengele Muhimu
- Miundo miwili: 3IN1 kwa ujenzi wa dijitali wa HD (ikiwa na bandari ya VTX ya dijitali ya HD SH1.0-6Pin na plagi za motor) na 4IN1 kwa ujenzi wa analojia (ikiwa na OSD na vidokezo vya solder vya VTX ya analojia ya nje).
- MCU: STM32G473CEU6 (168MHz); imetajwa kuwa na usindikaji wa kasi ya 55% zaidi kuliko F411.
- Matokeo ya ESC: 12A endelevu, 18A ya kilele; inasaidia DSHOT300 na DSHOT600.
- BEC Mpya: 5V/3A; muundo wa usambazaji wa nguvu wa LDO wa 3.3V usio na IMU.
- Mpokeaji wa Serial ELRS 2.4GHz wa ndani (V3.4.3), itifaki ya CRSF.
- Kumbukumbu ya kudumu: bodi ya 1mm; vipengele vya usakinishaji bila solder vinapatikana kwenye toleo la 3IN1.
Maelezo ya kiufundi
Kidhibiti cha Ndege (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Gyro | ICM42688P |
| Gyro kiwango cha juu cha sampuli (meza ya kulinganisha) | ICM42688P, 8KHz |
| Kumbukumbu ya Blackbox | 16MB (pia inaonyeshwa kama 16M) |
| Sensor | Voltage & sasa |
| BEC | 5V/3A |
| Usambazaji huru wa IMU | 3.3V LDO (LDO isiyo na IMU) |
| ESC (katika bodi) | 12A endelevu |
| RX | Serial ELRS 2.4GHz (V3.4.3) |
| Bandari ya USB | SH1.0-4Pin |
| Kiunganishi cha betri | BT2.0 |
| Plug ya motor | JST1.25-3Pin (pia inaonyeshwa kama JST1.25) |
| Ukubwa wa kufunga | 25.5mm x 25.5mm |
Toleo-Maalum I/O
| UART (3IN1) | UART 1 (RX Pekee/SBUS), UART 2 (Bila malipo), UART 3 (Kwa RX), UART 4 (Bila malipo/HD MSP) |
| UART (4IN1) | UART 1 (Kwa VTX), UART 2 (Bila malipo), UART 3 (Kwa RX), UART 4 (HAIPO) |
| OSD | AT7456E (toleo la 4IN1 pekee) |
| Bandari ya HD digital VTX | SH1.0-6Pin (toleo la 3IN1 pekee) |
Uzito
| 3IN1 | 3.8±0.1g (kiunganishi cha betri hakijajumuishwa); 4.2±0.1g (kiunganishi cha betri kimejumuishwa) |
| 4IN1 | 3.6±0.1g (kiunganishi cha betri hakijajumuishwa); 4.6±0.1g (kiunganishi cha betri kimejumuishwa) |
ESC
| Ingizo la nguvu | 1S pekee |
| Current | 12A endelevu, 18A kilele |
| Protokali ya ishara ya dijitali | DSHOT300, DSHOT600 |
| Firmware ya ESC | A_X_5_96_v0.19.2.hex kwa firmware ya BB51 Bluejay |
Jedwali la Ulinganisho (kama ilivyoelezwa)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Masafa ya MCU | 168MHz | 108MHz | |
| Gyro, kiwango cha juu cha sampuli | ICM42688P, 8KHz | BMI270, 3.2KHz | |
| ESC | 12A endelevu | 1S, 5A | |
| Blackbox kumbukumbu | 16M | 8M | |
| OSD | - | Betaflight OSD: AT7456E | |
| RX | Onboard Serial ELRS 2.4GHz | ||
| Motor plug | JST1.25 | ||
| Uzito | 3.8g | 3.6g | 3.64g |
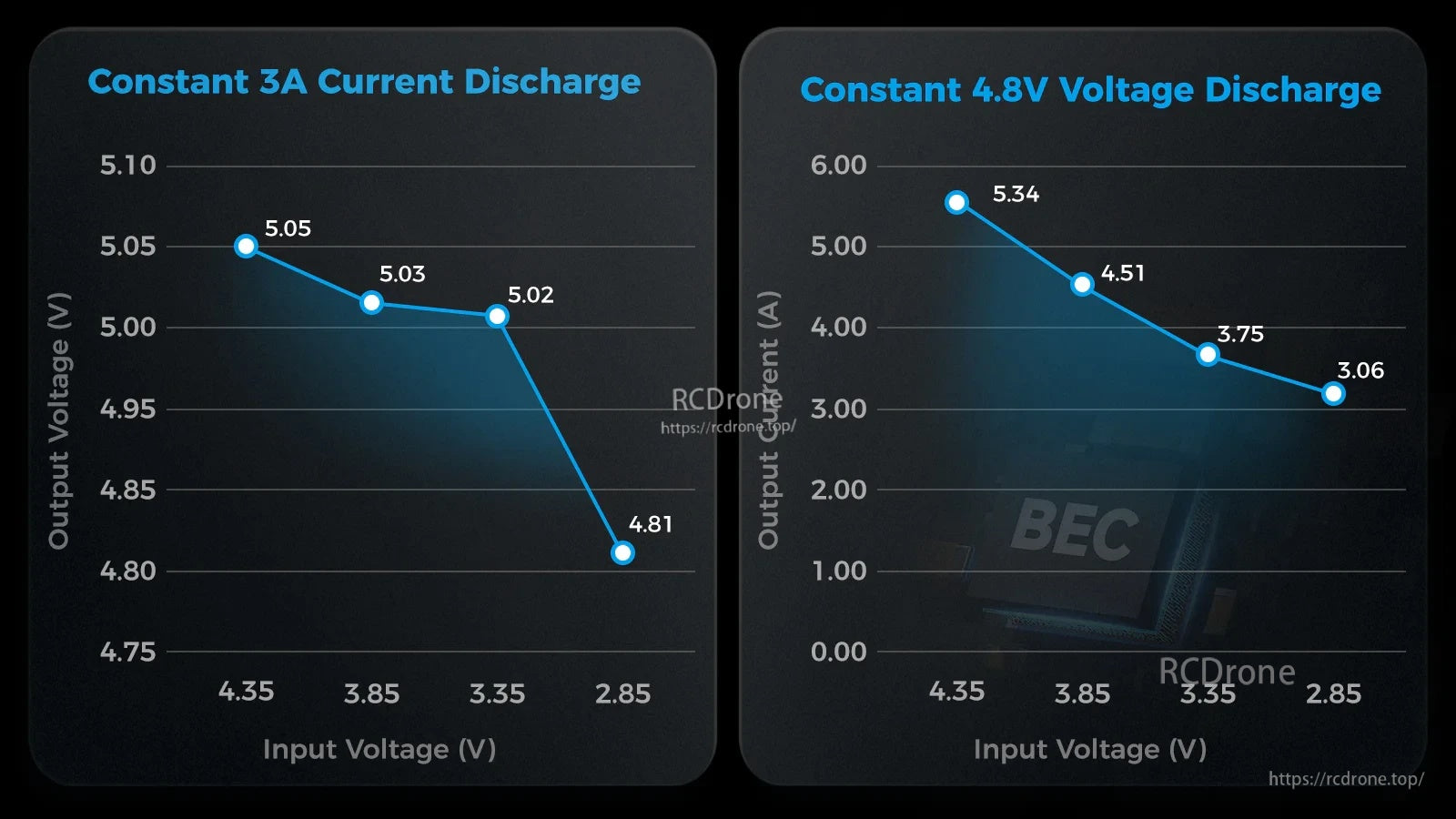
BEC Data ya Mtihani (kama inavyoonyeshwa)
- Uondoaji wa sasa wa 3A thabiti: Ingizo 4.35V → Matokeo 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- Uondoaji wa voltage wa 4.8V thabiti: Ingizo 4.35V → Matokeo 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
Bandari & Maelezo ya Usanidi (kutoka kwa michoro)
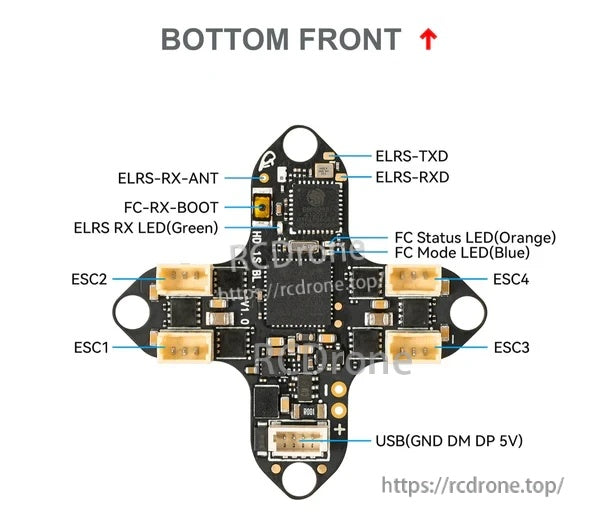
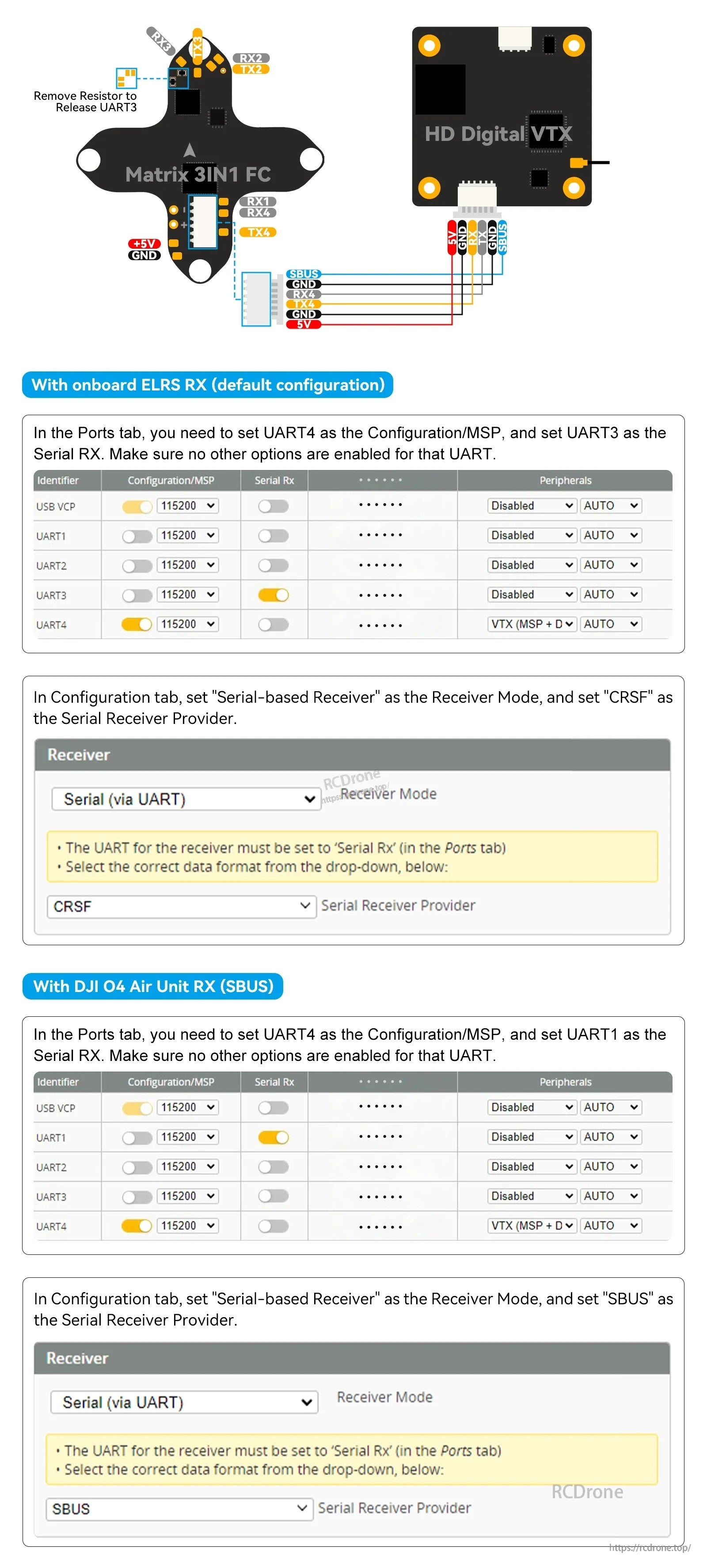
- USB pinout inaonyeshwa: USB (GND, DM, DP, 5V).
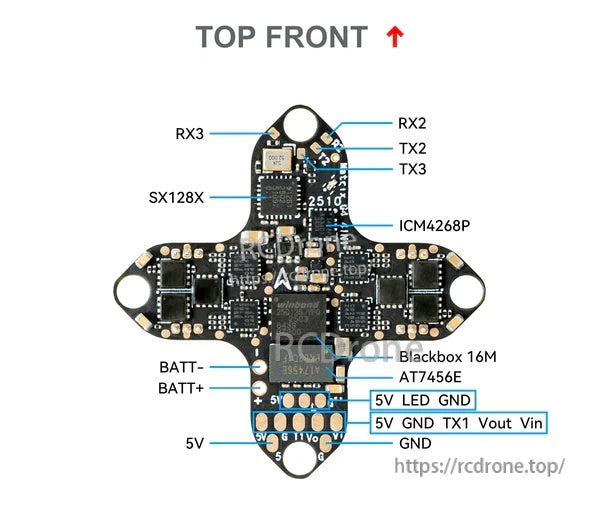
- Lebo za bodi za 3IN1 zilizonyeshwa ni pamoja na: RX3, RX2, TX2, TX3; BATT-, BATT+(1S), 5V, GND; SBUS (RX1), RX4, TX4; LED; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; FC-RX-BOOT; ELRS RX LED (Kijani); FC Status LED (Rangi ya Chungwa); FC Mode LED (Bluu); ESC1/ESC2/ESC3/ESC4.
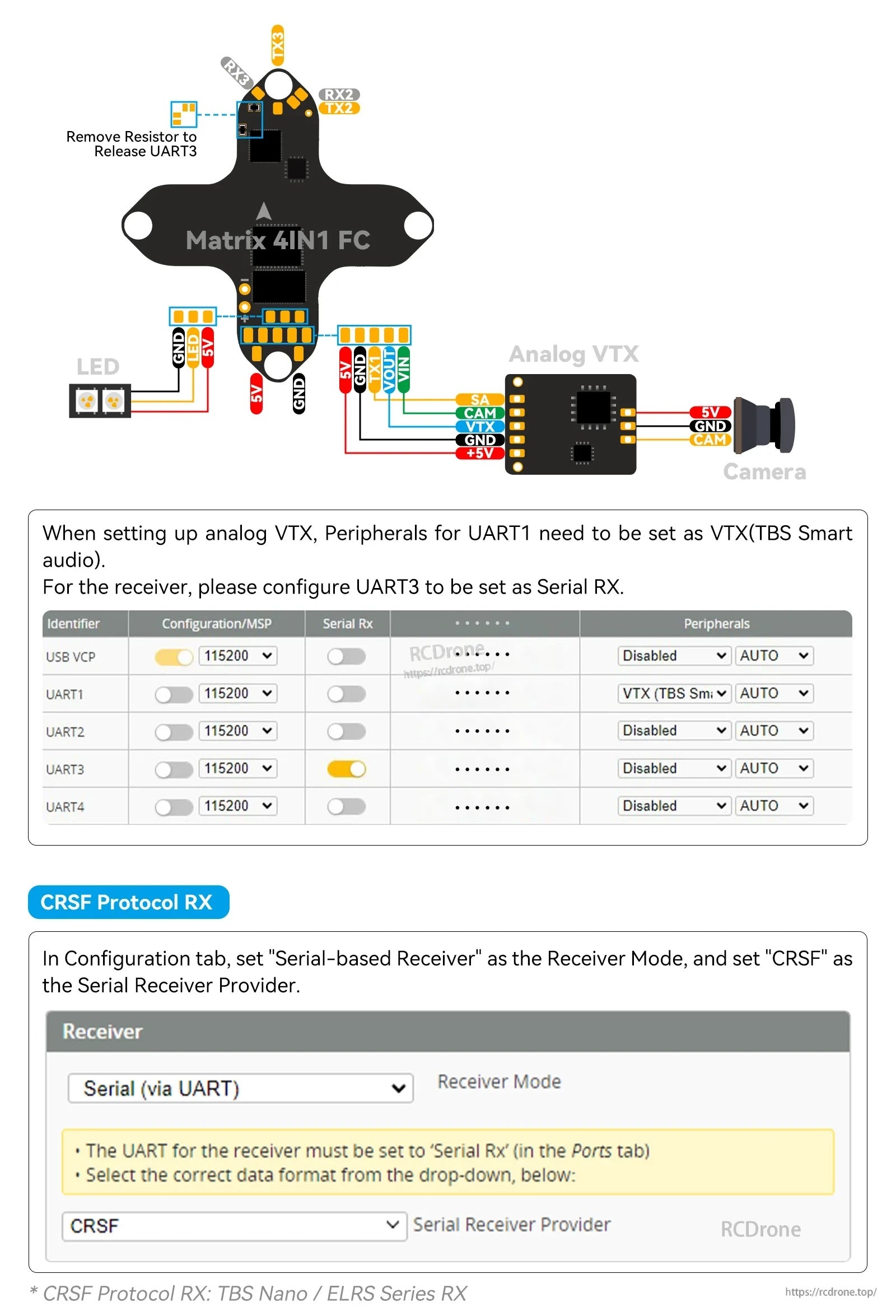
- Lebo za bodi za 4IN1 zilizonyeshwa ni pamoja na: SX128X; ICM42688P; Blackbox 16M; AT7456E; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; ESP8285; STM32G473; FC-RX-BOOT; FC Status LED; FC-Mode LED; ESC1/ESC2/ESC3/ESC4; pamoja na lebo za pad ikiwa ni pamoja na 5V/LED/GND na 5V/GND/TX1/Vout/Vin.
Usanidi wa Bandari za Betaflight ulioonyeshwa (3IN1)
- Na ELRS RX iliyopo kwenye bodi (kiwango cha kawaida): weka UART4 kuwa Configuration/MSP na UART3 kuwa Serial RX (hakuna chaguo kingine kilichowekwa kwa UART3). Njia ya Mpokeaji: Mpokeaji wa msingi wa Serial; Mtoa Mpokeaji wa Serial: CRSF.
- Na DJI O4 Air Unit RX (SBUS): weka UART4 kuwa Configuration/MSP na UART1 kuwa Serial RX (hakuna chaguo kingine kilichowekwa kwa UART1). Mode ya Mpokeaji: Mpokeaji wa msingi wa Serial; Mtoa Mpokeaji wa Serial: SBUS.
Usanidi wa Bandari za Betaflight unaonyeshwa (4IN1)
- Unapoweka VTX ya analojia: weka Vifaa vya UART1 kuwa VTX (TBS Smart audio).
- Kwa mpokeaji: sanidi UART3 kama Serial RX.
- Kumbukumbu ya Protokali ya CRSF RX inaonyeshwa: TBS Nano / ELRS Series RX.
Firmware
- Firmware ya FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- Firmware ya FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- Msingi wa firmware ya ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (inasaidia DSHOT300/DSHOT600; inataja chaguo za mara 24KHz/48KHz/96KHz za mara ya PWM na melodi za kuanzisha za kawaida)
Muhimu: Kuanzia Januari 5, 2026, FC ya 3IN1 inatarajiwa kuja na gyroscope ya BMI270. Thibitisha toleo la gyroscope kabla ya kuweka firmware. Matrix 1S 3IN1 na 4IN1 zinahitaji firmware tofauti.
Kumbuka: Epuka kubandika firmware ya ESC kwa muda mfupi; inasemekana hii inaweza kuongeza nafasi ya kukwama na kuharibu kidhibiti cha ndege.
Maelekezo & Pakua
- 3IN1 firmware + CLI dump: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- 4IN1 firmware + CLI dump: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Maelezo ya kutolewa ya Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Maelezo ya kutolewa ya Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Mradi wa Bluejay: https://github.com/bird-sanctuary/bluejay
- Toleo la Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- ESC Configurator: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Mwongozo wa kubandika firmware ya ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Kilichojumuishwa
Kifurushi cha Matrix 1S Kidhibiti cha Ndege kisichokuwa na brashi (3IN1)
- 1 * Matrix 1S Kidhibiti cha Ndege kisichokuwa na brashi (3IN1)
- 1 * Adaptari ya Type-C hadi SH1.0
- 1 * Kebuli ya Adaptari ya SH1.0-4Pin
- 1 * Kebuli ya Adaptari ya SH1.0-6Pin
- 4 * M1.2*4 Vifungo vya Kujichoma
- 4 * M1.4*5 Vifungo vya Kujichoma
- 4 * Mpira wa Kuzima Mvutano
Matrix 1S Kidhibiti cha Ndege kisicho na Brashi (4IN1) kifurushi
- 1 * Matrix 1S Kidhibiti cha Ndege kisicho na Brashi (4IN1)
- 1 * Adaptari ya Type-C hadi SH1.0
- 1 * Kebula ya Adaptari ya SH1.0-4Pin
- 4 * M1.2*4 Vifungo vya Kujichoma
- 4 * M1.4*5 Vifungo vya Kujichoma
- 4 * Mpira wa Kuzima Mvutano
Tahadhari
- Imetengenezwa kwa ajili ya wapya na wapanda ndege wa burudani, Matrix FC inatumia bodi ya 1mm kwa kuegemea na imeundwa kwa ajili ya usakinishaji rahisi.
- Vikundi vya ndege vinakidhiwa kwa kasoro za mtengenezaji. Masuala yanayotokana na makosa ya mtumiaji, uharibifu wa kimwili wa ajali, uharibifu wakati wa usakinishaji au kubomoa, mabadiliko, kuongezeka kwa nguvu, moto wa umeme, au kuathiriwa na maji hayakidhiwi.
Kwa maswali ya ulinganifu (uchaguzi wa 3IN1 dhidi ya 4IN1, wiring, au firmware), wasiliana na msaada kwa https://rcdrone.top/ au [email protected].
Maelezo

Chagua kati ya bodi ya 3IN1 kwa ajili ya ujenzi wa dijitali wa HD na chaguo la 4IN1 ambalo linaongeza msaada wa Betaflight OSD na VTX ya analojia.


BEC iliyosasishwa ya 5V/3A ina sifa ya pato thabiti katika voltages za kawaida za ingizo la 1S.

Viunganishi visivyo na solder vinarahisisha usakinishaji, huku ikiwa na bandari maalum ya VTX ya dijitali ya HD na kuunganishwa kwa motor nyaya.

Kwa ujenzi wa analojia, toleo la 4IN1 linatoa pad za solder ili kuunganisha VTX ya analojia ya nje.

Maelezo ya usanidi yanashughulikia ramani za kawaida za bandari za Betaflight kwa ujenzi wa dijitali wa HD na mpokeaji wa Serial ELRS ulioko kwenye bodi.
Mwongozo wa usanidi unazingatia wiring ya VTX ya analojia na mipangilio ya CRSF kwa mpokeaji wa Serial ELRS ulioko kwenye bodi.

Vifaa vilivyomo vinasaidia kuweka na kufunga haraka benchi, pamoja na adaptari ya USB, kebo, na vifaa vya kufunga.

Related Collections





