MFD Myflydream Crosshair AP - Kidhibiti cha ndege cha Crosshair AutoPilot kipya cha usaidizi wa AP Osd CAN-BASI NA Mfumo wa Masafa marefu wa TF kwa Ndege ya RC Drone
MFD Myflydream Crosshair AP - Kidhibiti cha ndege cha Crosshair AutoPilot kipya cha usaidizi wa AP Osd CAN-BASI NA Mfumo wa Masafa marefu wa TF kwa Ndege ya RC Drone
MyFlyDream
Couldn't load pickup availability
MFD Myflydream Crosshair MAELEZO AP
Kizio cha magurudumu: Sahani ya Chini
Tumia: Vichezeo vya Magari na Udhibiti wa Mbali
Boresha Sehemu/Vifaa: Nyingine
Boresha Sehemu/Vifaa: Adapta
Ugavi wa Zana: Kukata
Ugavi wa Zana: Nyingine
Vigezo vya kiufundi: KV1100
Ukubwa: 10*10*10
Vifaa/Vidhibiti vya Kidhibiti cha Mbali: Nyingine
Vidhibiti/Vifaa vya Kidhibiti cha Mbali: Kidhibiti cha Mbali
Kupendekeza Umri: 12+y
Sehemu za RC & Accs: Mifumo ya Redio
Asili: Uchina Bara
Nambari ya Mfano: MFD Crosshair AP
Nyenzo: Chuma
Sifa za Hifadhi ya Magurudumu manne: Mkusanyiko
Kwa Aina ya Gari: Ndege
Myflydream MFD Crosshair Autopilot yenye Color HD OSD Myflydream 2019 AP Mpya Iliyoundwa Mahususi kwa Skywallker X5 X7 X-UAV Talon
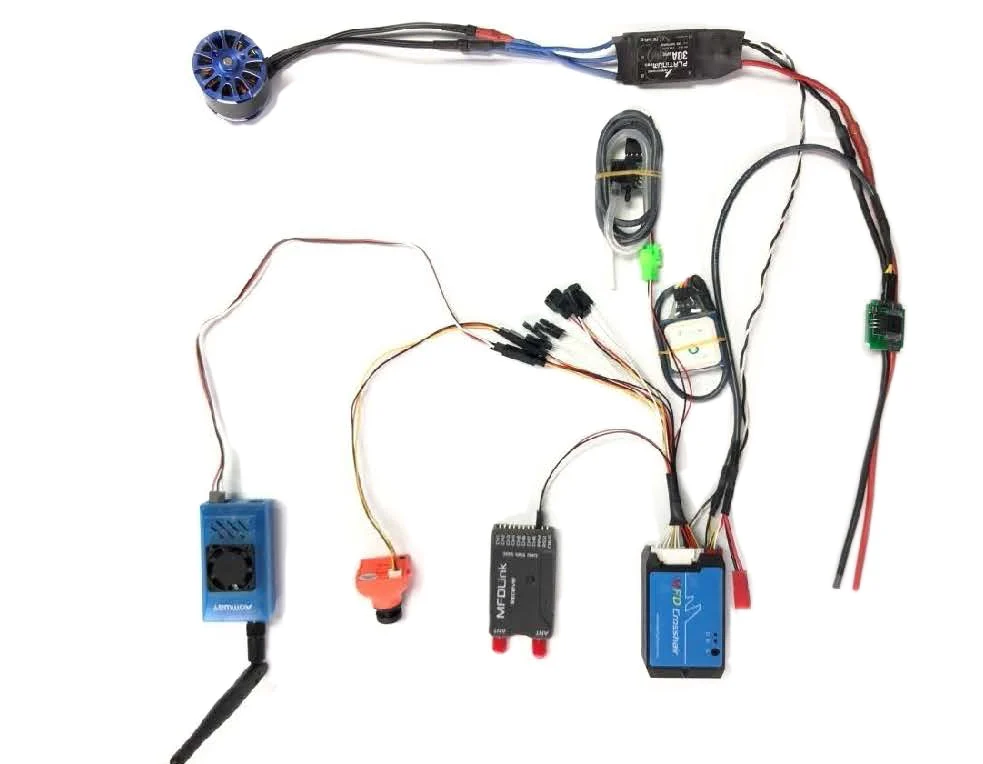
- 1.Myflydream Crosshair Autopilot
- 2.Cirocomm 580 GPS Moduli.
- 3.Sensorer ya kasi ya hewa
- 4.50A Kitambuzi cha Sasa
- 5.Kebo za Kiendelezi
- 6.Kisasisho cha Programu dhibiti ya USB-TIL
OSD ya Rangi ya HD, kanuni mpya ya udhibiti wa safari za ndege, usanidi wa maunzi wenye nguvu zaidi, huja na GPS na kasi ya anga.Hiki ndicho Kiotomatiki kipya cha Myflydream Crosshair.
The MFD Crosshair Autopilot ina vitambuzi vilivyojengewa ndani vya gyroscopes za mhimili-tatu, akceleromita za mhimili-tatu, dira za kielektroniki za mhimili-tatu na vipimo.Majaribio haya ya kiotomatiki yana kichakataji mahususi cha kukokotoa mtazamo wa udhibiti wa safari za ndege, na kichakataji kingine kilichojitolea hushughulikia picha za OSD na mantiki ya safari ya ndege.Kulingana na maunzi na programu hizi, rubani hii inaweza kutumika kuimarisha uthabiti wa ndege, na kutumika kudhibiti ndege ili iruke kulingana na njia na mwinuko ulioundwa ili kutambua madhumuni ya safari ya kiotomatiki.
Maelezo:
- Uzito: gramu 30
- Matumizi ya Sasa: <200ma@12V, GPS imejumuishwa.
- Nguvu ya Kuingiza Data: 7~26V, Pendekeza kutumia 12V
- Ingizo la PWM: Ingizo 7 za PWM, au pembejeo 8 za PPM, au pembejeo 16 za SBUS
- Pato la PWM: 10
- Kiwango cha Juu cha Angular: 2000deg/s
- Njia za Kidhibiti cha Ndege: MAN, STB, CIR, ALT, WPT, RTH
- Upeo wa Njia: 20~200

Tabia:
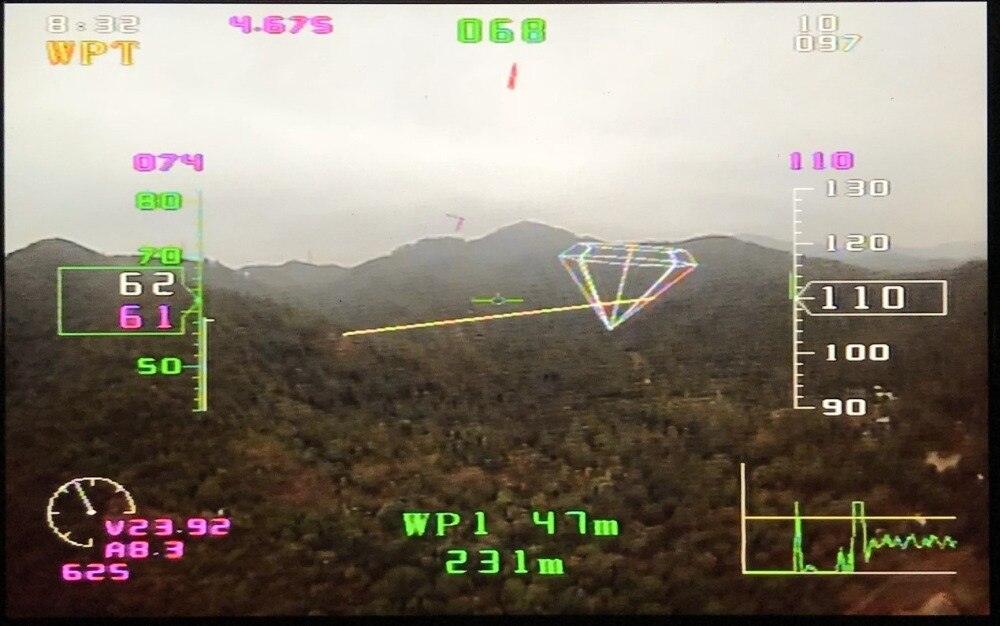
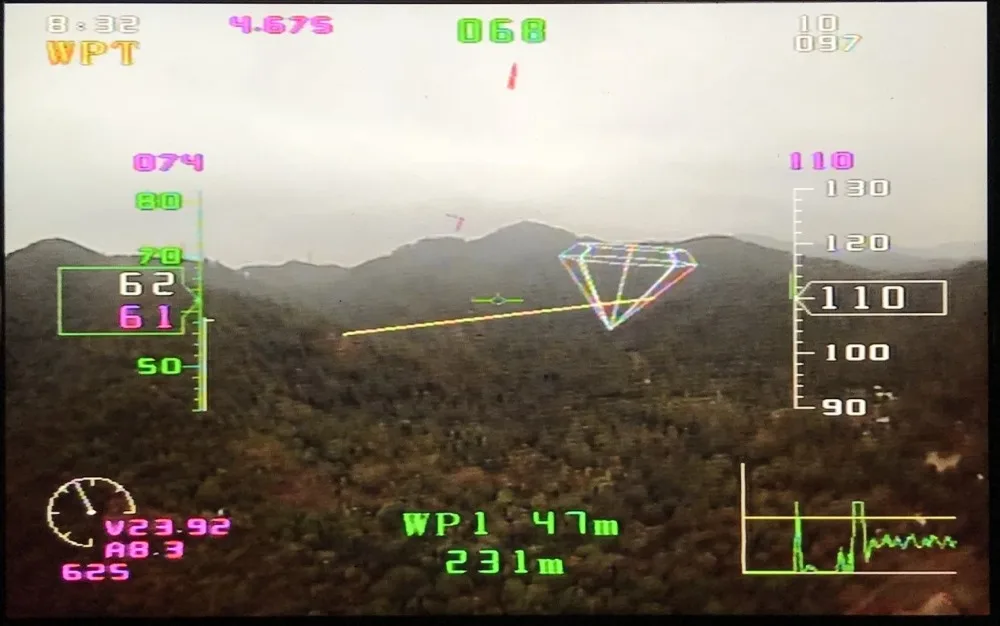
1.Rangi ya mwonekano wa juu wa OSD, hutoa kiolesura cha ndege kinachovutia macho na kinaonyesha mienendo ya safari ya ndege.Watumiaji wanaweza pia kubadili kiolesura cha jadi cha OSD nyeusi na nyeupe.
2.Jenereta ya mawimbi ya video ya rangi iliyojengewa ndani, inayoweza kuonyesha kiolesura cheusi cha OSD bila kamera ya nje.
3.Tumia menyu ya lugha mbili ya Kichina/Kiingereza, rahisi kutumia.
4.Algorithm mpya ya kudhibiti PID, inadhibiti moja kwa moja kasi ya ndege.Jibu kwa haraka kwa uso wa usukani, thabiti zaidi kwa udhibiti wa ndege, na laini zaidi kwa mpito wa mtazamo.
5.Utulivu bora na utangamano, kupunguza kuingiliwa kwa maambukizi ya data ya nguvu ya juu, sambamba na kamera mbalimbali.
6.Usaidizi wa kina zaidi kwa itifaki ya MAVLink.Mtumiaji hawezi tu kutumia programu ya kituo cha ardhini cha MFD, lakini pia kutumia kigezo cha usomaji/mipangilio ya MissionPlanner kwa kupanga njia, safari ya ndege n.k.
7.Kupitisha onyesho la uhalisia ulioboreshwa ambao unaonyesha vitu vya 3D wireframe katika OSD kulingana na mtazamo na nafasi ya ndege.Kwa mfano, njia pepe ambayo inakaribia kufika inaweza kuonyeshwa kwenye skrini, nafasi inayolingana na urefu wa ndege nyingine inaweza kuonyeshwa kwa mtindo wa 3D wenye rangi tofauti.
8.Uwezo sahihi wa kukimbia.Njia ya safari ya ndege inaweza kupangwa kwenye kituo cha ardhini, na inasaidia kidhibiti cha vichochezi cha kamera ambacho kinaweza kutumika kwa madhumuni ya uchunguzi wa angani.

9.Inatumika na matoleo mapya na ya zamani ya MFD AAT.

11.Udhibiti sahihi zaidi wa throttle, kushuka kwa kasi kwa kasi kidogo na ufanisi wa juu wa ndege.
12.Utendaji ulioboreshwa wa kuondoka kiotomatiki, tikisa tu injini za kuwasha ndege wakati kichochezi kinapofanya kazi.Salama zaidi na rahisi kutumia.
13.Kitendaji cha kutua kiotomatiki kitapatikana hivi karibuni.
14.Usanidi wa vifaa tajiri sana na uboreshaji wa nguvu na uwezo wa upanuzi.
15.Inakuja na vichakataji vidogo vitatu vyenye utendakazi wa juu ambavyo hushughulikia azimio la mtazamo, udhibiti wa safari ya ndege na usindikaji wa mawimbi ya video kando.
16.Uaminifu bora na gyroscopes mbili na accelerometers mbili.
17.Utendaji wa safari za ndege za urefu usiobadilika umeboreshwa kwa kutumia baromita mpya.
18.Pembejeo saba za PWM.PWM ya 7 inaoana na pembejeo za PPM na SBUS.
19.Matokeo 10 ya PWM, hutoa nyenzo za kutosha za maunzi kwa mbawa zenye mchanganyiko wa VTOL, udhibiti wa shutter ya kamera ya uchunguzi wa angani na mzunguko wa kamera n.k.
20.Mbali na GPS na bandari za upitishaji data, kuna bandari mbili za ziada za miunganisho ya sensorer za nje.
21.Inasaidia kiolesura cha data cha CAN-BUS, rahisi kupanua vifaa vya pembeni.
22.Saidia usomaji wa kadi ya TF, rahisi kusoma kumbukumbu za ndege na faili za POS.



'
Related Collections