

MUWEIDU K7030 Motor 24V Brushless DC FOC Servo Motor, Encoder ya 18-bit, RS485/CAN, Φ69×33.9mm
MUWEIDU K7030 Motor 24V Brushless DC FOC Servo Motor, Encoder ya 18-bit, RS485/CAN, Φ69×33.9mm
MUWEIDU
Couldn't load pickup availability
Muhtasari
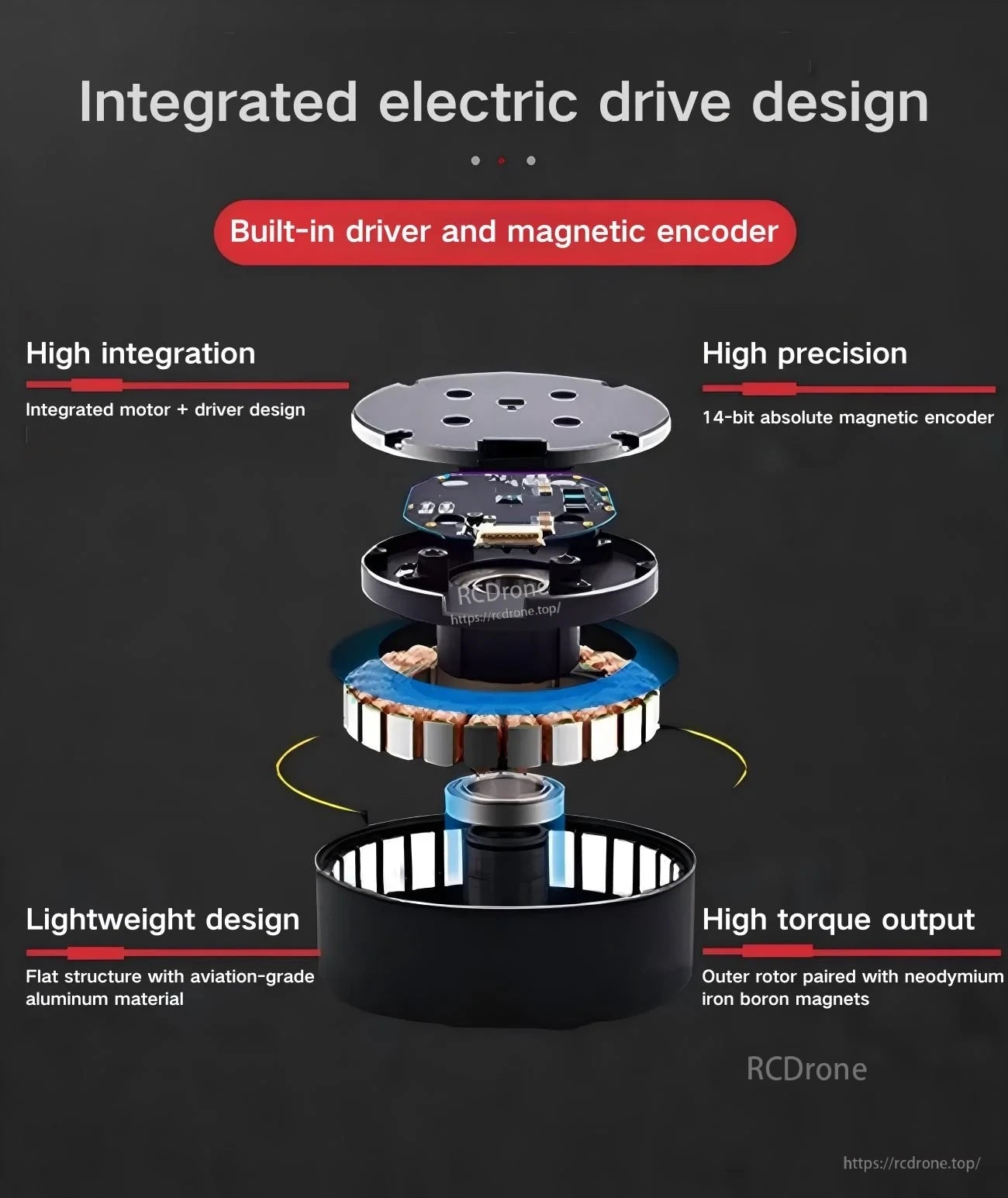
Motor ya MUWEIDU K7030 ni motor ya K Series ya kasi ya kati hadi ya juu isiyo na brashi motor iliyoundwa kama motor ya servo ya FOC yenye utendaji wa juu na dhana ya kuendesha umeme iliyojumuishwa. Inajumuisha muundo wa motor + dereva uliojumuishwa na encoder ya sumaku iliyojengwa ndani, ikisaidia udhibiti wa kasi/nafasi na urekebishaji wa vigezo, upimaji, na masasisho ya firmware yanayotegemea PC.
Vipengele Vikuu
- Motor ya servo ya FOC yenye utendaji wa juu
- Muundo wa kuendesha umeme uliojumuishwa: dereva wa ndani na encoder ya sumaku
- Muundo uliojumuishwa, mwepesi, wa usahihi wa juu, na torque ya juu
- Usahihi wa encoder umeboreshwa kutoka 14-bit hadi 18-bit
- Torque ya motor iliyoboreshwa
- Ingizo la PWM linasaidiwa
- Matokeo ya torque ya juu: rotor ya nje iliyo na sumaku za neodymium iron boron
- Muundo mwepesi: muundo wa tambarare ulio na nyenzo za alumini za kiwango cha anga
- Kurekebisha / kupima / kuboresha firmware kwa kutumia PC kunapatikana
- Inafaa na majukwaa ya maendeleo ya chanzo wazi ikiwa ni pamoja na PC, MCU, PLC, kompyuta za viwandani na Raspberry Pi
- Njia nyingi za kudhibiti: Njia ya Torque, Njia ya Kasi, Njia ya Udhibiti wa Mizunguko Mingi, Njia ya Nafasi ya Mzunguko Mmoja + Mwelekeo, Njia ya Nafasi ya Kuongeza
- Multi-Turn Control Mode (na kikomo cha kasi); Single-Turn Position + Direction Mode (na kikomo cha kasi); Incremental Position Mode (na kikomo cha kasi)
Maelezo
| Mfano | K7030 (10/23/45T) |
| Voltage iliyoainishwa | 24V |
| Current iliyoainishwa | 8.3A / 3.62A / 1.93A |
| Nguvu ya Juu | 330W / 75W / 24.5W |
| Torque Iliyopimwa | 1 N.m / 1 N.m / 0.99 N.m |
| Torque ya Juu | 2 N.m / 3.8 N.m / 2.42 N.m |
| Speed Iliyopimwa | 1500 rpm / 580 rpm / 220 rpm |
| Encoder | 18 bit |
| Inertia ya Rotor | 933 gcm² |
| Ufuatiliaji wa Joto la Motor | NDIO |
| Njia za Kudhibiti | Speed / Position |
| Protokali ya Mawasiliano | RS485 au CAN |
| Vipimo vya Jumla | Φ69mm × 33.9mm |
| Uzito | 352g |
Ufafanuzi wa Kiunganishi (CAN/RS485)
| Kiunganishi | Kumbuka |
|---|---|
| B/L | RS485-B au CAN-L |
| A/H | RS485-A au CAN-H |
| V- | Chanzo cha Nguvu Chini |
| V- | Chanzo cha Nguvu Chini |
| V+ | Chanzo cha Nguvu Juu |
| V+ | Chanzo cha Nguvu Juu |
| T | Mtumaji wa UART |
| R | Mpokeaji wa UART |
| G | Signal GND |
Kwa mwongozo wa wiring, maelezo ya uunganisho, au maswali ya kabla ya mauzo, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maombi
- Roboti za kibinadamu
- Michemu za roboti
- Exoskeletons
- Roboti wa mguu nne
- Magari ya AGV
- Roboti za ARU
- Roboti wa ukaguzi
- Kamera ya mkono
- LiDAR
- Gimbal pod
Maelekezo
Maelezo

Motor ya FOC ya 24V yenye ukubwa mdogo servo motor iliyoundwa kwa udhibiti sahihi wa kasi na nafasi katika miradi ya roboti na udhibiti wa mwendo.
Muundo wa motor, dereva, na encoder ya sumaku iliyounganishwa husaidia kupunguza wiring na kurahisisha ufungaji.

Uwekaji wazi wa lebo za kiunganishi cha CAN/RS485 na swichi ya ID iliyopo kwenye bodi inasaidia wiring ya mfumo wa nodi nyingi.
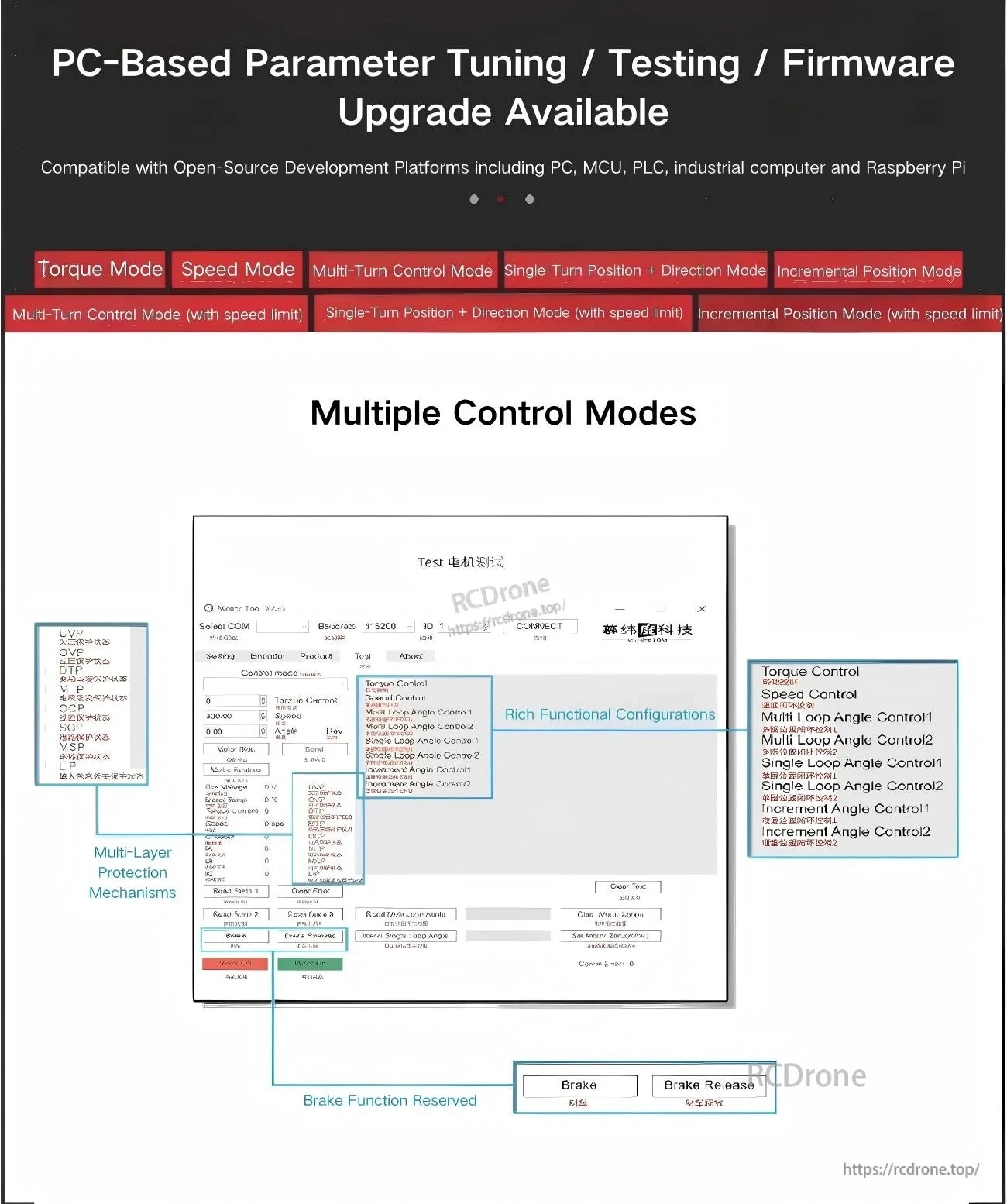
Zana za msingi wa PC zinawawezesha kubadilisha vigezo, kufanya majaribio, na kusasisha firmware katika hali za torque, kasi, na nafasi.

Related Collections

