

MUWEIDU K9040 Motor K Series Brushless DC FOC Servo Motor 24V 18bit Encoder RS485/CAN Φ89×42mm
MUWEIDU K9040 Motor K Series Brushless DC FOC Servo Motor 24V 18bit Encoder RS485/CAN Φ89×42mm
MUWEIDU
Couldn't load pickup availability
Muhtasari
MUWEIDU K9040 Motor ni motor ya DC isiyo na brashi ya kasi ya kati hadi ya juu iliyoundwa kama motor ya servo ya FOC yenye utendaji wa juu. Inajumuisha muundo wa kuendesha umeme uliojumuishwa na dereva uliojengwa ndani na encoder ya sumaku, na inasaidia udhibiti wa kasi/nafasi kwa matumizi ya roboti na automatisering.
Vipengele Vikuu
- Motor ya DC isiyo na brashi ya K Series yenye kasi ya kati hadi juu (motors za servo)
- Motor ya servo yenye utendaji wa juu wa FOC
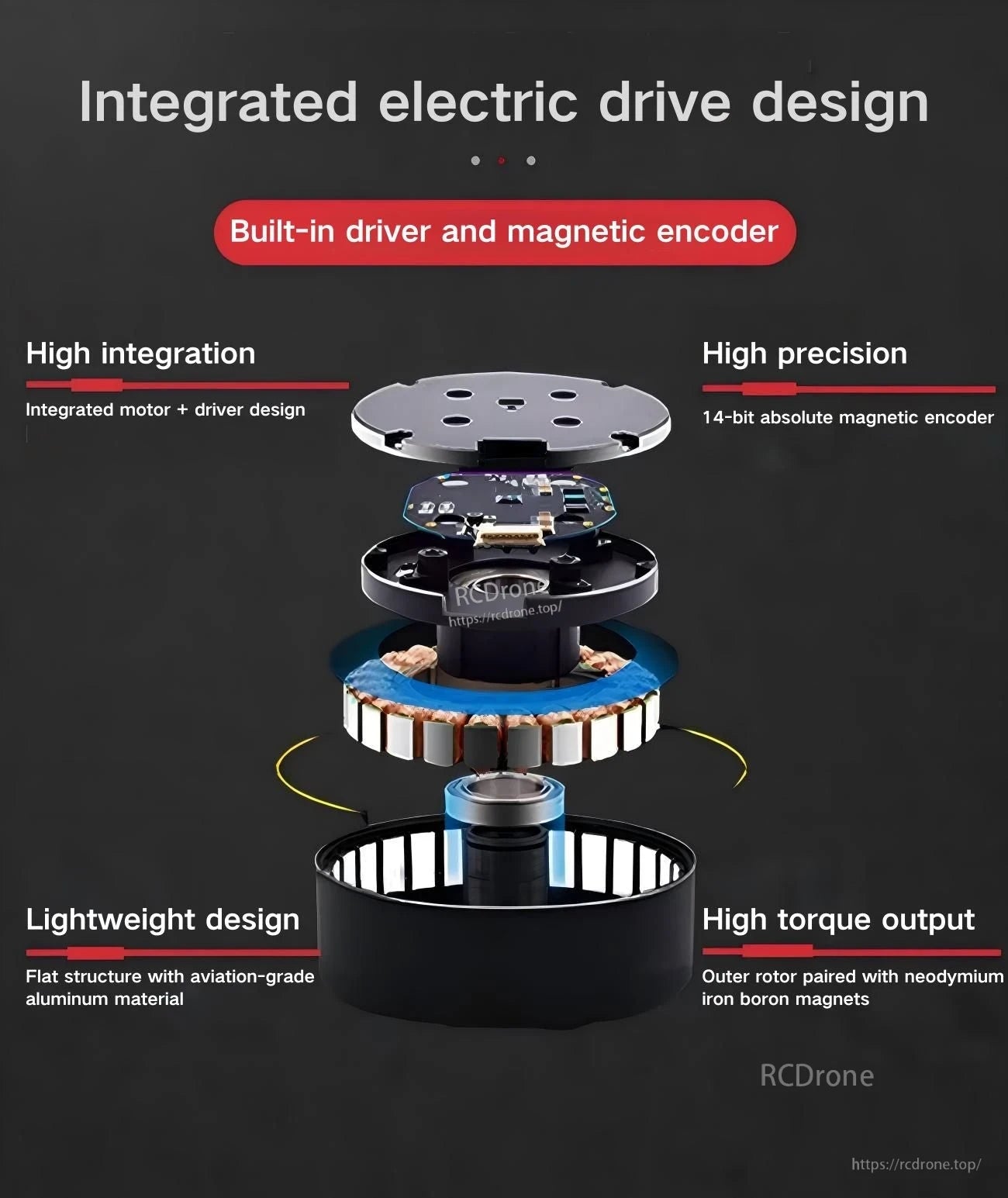
- Muundo wa kuendesha umeme uliojumuishwa: dereva wa ndani na encoder ya sumaku
- Muundo wa motor + dereva uliojumuishwa (kuunganishwa kwa juu)
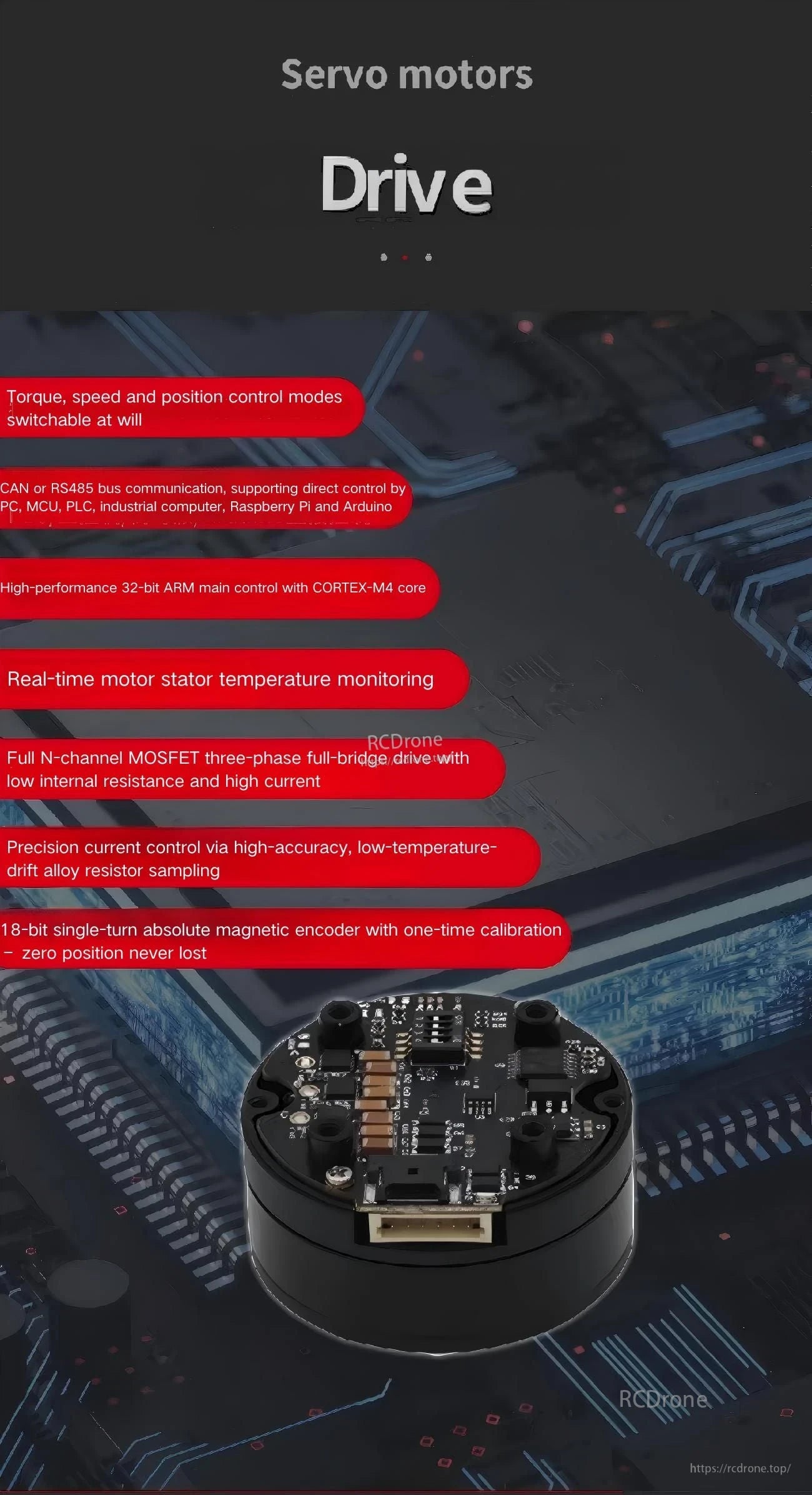
- Usahihi wa encoder umeboreshwa kutoka 14-bit hadi 18-bit; encoder ya sumaku ya kipekee ya 18-bit yenye kalibra moja (nafasi ya sifuri haitapotea kamwe)
- Torque ya cogging ya motor imeboreshwa
- Ingizo la PWM linaungwa mkono
- Ufuatiliaji wa joto la stator ya motor kwa wakati halisi (ufuataji wa joto la motor: NDIYO)
- Mawasiliano ya basi ya CAN au RS485; inasaidia udhibiti wa moja kwa moja na PC, MCU, PLC, kompyuta ya viwandani, Raspberry Pi na Arduino
- Udhibiti mkuu wa ARM wa utendaji wa juu wa 32-bit wenye kiini cha CORTEX-M4
- Kuendesha kwa daraja kamili la N-channel MOSFET tatu-fasi kwa upinzani wa ndani wa chini na sasa ya juu
- Udhibiti wa sasa wa usahihi kupitia sampuli za upinzani wa aloi zenye usahihi wa juu na mabadiliko ya joto ya chini
- Muundo mwepesi; muundo wa gorofa kwa nyenzo za alumini za kiwango cha anga
- Matokeo ya torque ya juu: rotor ya nje iliyo na magnets za neodymium iron boron
- Uboreshaji wa vigezo vya msingi wa PC / upimaji / sasisho la firmware linapatikana
- Modes nyingi za udhibiti zimeonyeshwa: Mode ya Torque, Mode ya Kasi, Mode ya Udhibiti wa Mizunguko Mingi, Mode ya Nafasi ya Mzunguko Mmoja + Mwelekeo, Mode ya Nafasi ya Kuongeza (ikiwemo toleo zenye kikomo cha kasi)
- Funguo la breki limehifadhiwa (kama inavyoonyeshwa kwenye kiolesura cha zana za PC)
Maombi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons
- Roboti za mguu nne
- Magari ya AGV
- Roboti za ARU
- Roboti ya ukaguzi
- Kamera ya mkononi
- LiDAR
- Gimbal pod
Maelezo ya kiufundi
| Mfano | K9040 (16/35T) |
| Voltage iliyoainishwa | 24V |
| Current iliyoainishwa | 7.03A / 3.34A |
| Nguvu ya Juu | 120W / 55W |
| Torque Iliyopimwa | 1.63 N.m / 1.67 N.m |
| Torque ya Juu | 3.4 N.m / 5 N.m |
| Speed iliyopimwa | 780 rpm / 290 rpm |
| Encoder | 18bit |
| Inertia ya Rotor | 3271 gcm² |
| Ufuatiliaji wa Joto la Motor | NDIO |
| Modes za Udhibiti | Speed/Position |
| Protokali ya Mawasiliano | RS485 au CAN |
| Vipimo vya Jumla | Φ89mm × 42mm |
| Uzito | 660g |
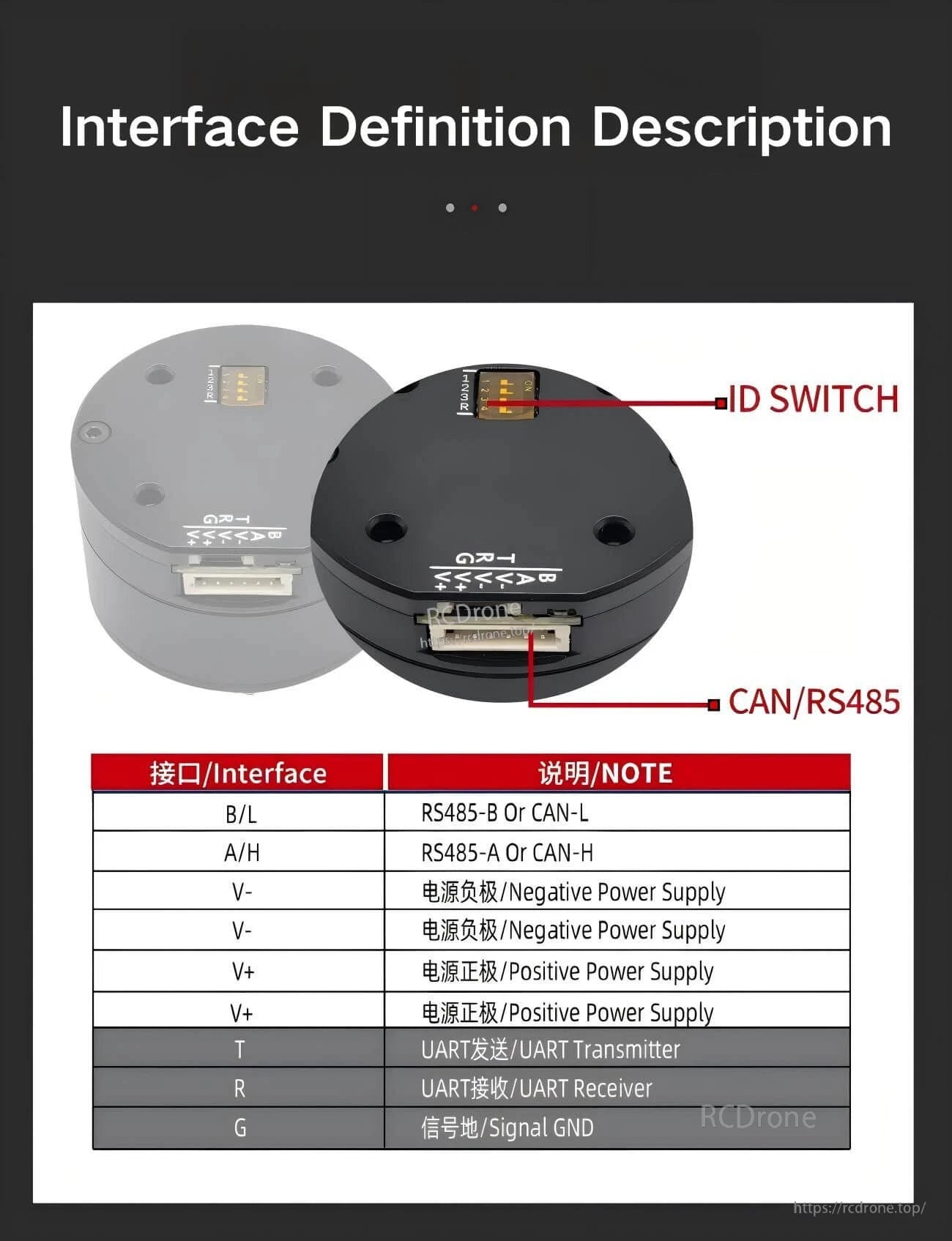
Ufafanuzi wa Interface
- ID SWITCH
- Maelezo ya pini za kiunganishi cha CAN/RS485:
| B/L | RS485-B au CAN-L |
| A/H | RS485-A au CAN-H |
| V- | Chanzo cha nguvu hasi |
| V- | Nguvu hasi |
| V+ | Nguvu chanya |
| V+ | Nguvu chanya |
| T | Transmitter wa UART |
| R | Mpokeaji wa UART |
| G | Signal GND |
Kwa uchaguzi wa bidhaa au msaada wa uunganisho, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelekezo
Maelezo

FOC ya K Series yenye ukubwa mdogo motor ya servo iliyojengwa kwa ajili ya roboti na automatisering, ikiwa na gari lililojumuishwa na encoder ya usahihi wa juu.
Ujenzi wa motor + dereva uliojumuishwa husaidia kurahisisha wiring na mpangilio wa mfumo huku ukihifadhi uzito wa kifurushi.
Badilisha kati ya hali za udhibiti wa torque, kasi, na nafasi, pamoja na mawasiliano ya basi ya CAN/RS485 na ufuatiliaji wa joto la stator kwa wakati halisi.
Uwekaji wazi wa lebo za kiolesura hufanya iwe rahisi kuunganisha nguvu na mawasiliano ya CAN/RS485, ikiwa na swichi ya ID iliyojumuishwa kwa mipangilio ya nodi nyingi.
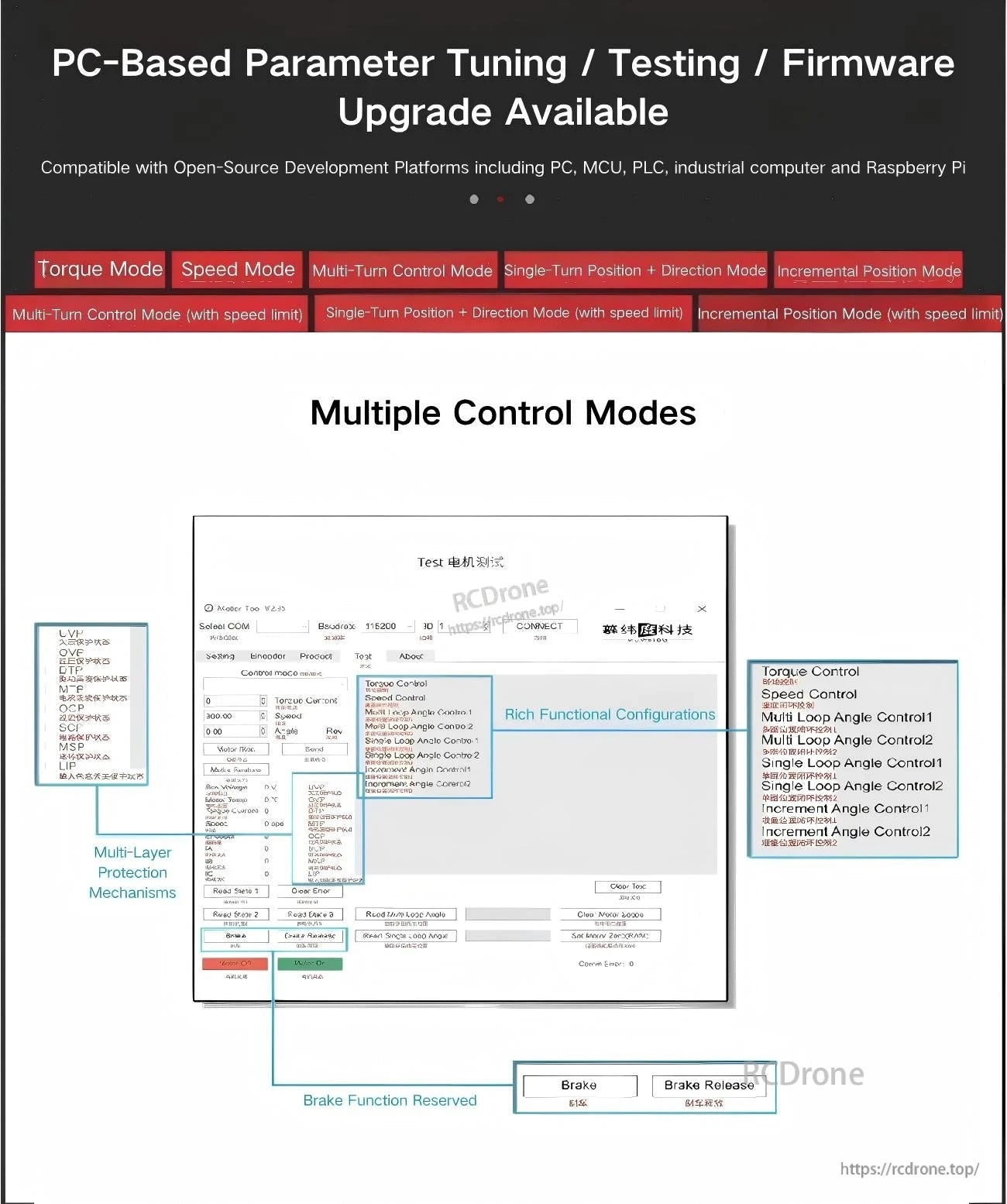
Programu ya PC inasaidia tuning ya vigezo, majaribio, na masasisho ya firmware, ikiwa na hali nyingi za udhibiti na chaguzi za ulinzi zilizojengwa ndani.

Inafaa vizuri kwa mifumo ya kudhibiti mwendo ya kompakt kama vile roboti za ukaguzi, stabilizer za mkono, majukwaa ya LiDAR, na vidonge vya gimbal.
Related Collections

