

MUWEIDU L4030 Motoru wa Servo wa DC Usio na Brashi 16V 160rpm 0.25N.m RS485/CAN Kichunguzi cha 15/18-bit
MUWEIDU L4030 Motoru wa Servo wa DC Usio na Brashi 16V 160rpm 0.25N.m RS485/CAN Kichunguzi cha 15/18-bit
MUWEIDU
Couldn't load pickup availability
Muweidu
L4030 Motor ni motor ya kasi ya chini, yenye usahihi wa juu, isiyo na brashi servo motor yenye vipengele vya kuendesha umeme vilivyounganishwa kwa udhibiti wa kasi/nafasi. Inasaidia mawasiliano ya RS485 au CAN na imeundwa kwa matumizi ya mwendo yaliyofungwa, yenye nafasi ndogo yanayohitaji uendeshaji thabiti na laini.
Vipengele Vikuu
- Uwekaji wa Mfululizo: “Mfululizo wa Motors za DC zisizo na Brashi za Kasi ya Chini & Ufanisi wa Juu”
- Mini servo motors; muundo wa shimo-shaft
- Uendeshaji thabiti & laini
- Imeidhinishwa na CE
- Ushirikiano wa juu wa usahihi
- Muundo mwepesi; utendaji wa torque wa juu
- Inakidhi mahitaji ya udhibiti wa nafasi wa kasi ya chini na usahihi wa juu
- MCU ya utendaji wa juu ya 32-bit inaruhusu Mfululizo wa MS kuwa na ufanisi kamili na amri zote za udhibiti za Mfululizo wa MF
- Karatasi za chuma za silicon za kiwango cha juu na magnets za kudumu za utendaji wa juu zinazostahimili joto zimetumika kama vifaa vya msingi vya motor
- Muundo wa rotor wa nje wa hatua nyingi ulio sawa unatoa torque ya juu kwa matumizi yenye nafasi finyu
- Muundo usio na brashi wenye kuzaa kwa utendaji wa juu kwa kuzunguka laini na maisha marefu ya huduma
- Upinzani wa aloi wa usahihi wa juu, wa joto la chini kwa sampuli sahihi za sasa na udhibiti
- Dereva kamili wa N-channel tatu-fasi wa daraja kamili wenye upinzani wa ndani wa chini na pato la sasa la juu
- Inasaidia kubadilisha bila mshono kati ya hali za udhibiti wa torque wazi, kasi na nafasi
- Kalibrishaji ya mara moja; “nafasi sifuri haitapotea kamwe”
Maelezo ya Kiufundi
| Mfano | L4030 |
| Voltage Iliyoainishwa | 16V |
| Current Iliyoainishwa | 1.1A |
| Nguvu ya Juu | 5.5W |
| Torque Iliyopimwa | 0.25N.m |
| Torque ya Juu | 0.35N.m |
| Speed Iliyopimwa | 160rpm |
| Encoder | 15bit au 18bit |
| Inertia ya Rotor | 105gcm^2 |
| Ufuatiliaji wa Joto la Motor | NDIYO |
| Modes za Udhibiti | Speed/Position |
| Protokali ya Mawasiliano | RS485 au CAN |
| Vipimo vya Jumla | Phi39.6mm x 33mm |
| Uzito | 112g |
Maelezo ya Kiunganishi
- KATIKA KATIKA
- CAN/RS485
| Kiunganishi | Kumbuka |
|---|---|
| B/L | RS485-B au CAN-L |
| A/H | RS485-A au CAN-H |
| V- | Chanzo cha Nguvu Mbaya |
| V- | Chanzo cha Nguvu Mbaya |
| V+ | Chanzo cha Nguvu Chanya |
| V+ | Chanzo cha Nguvu Chanya |
| T | Mpitishaji wa UART |
| R | Mpokeaji wa UART |
| G | Signal GND |
Matukio ya Maombi
- Roboti za Binadamu
- Microsimu za Roboti
- Exoskeletons
- Roboti wa Nguvu Nne
- Magari ya AGV
- Roboti za ARU
- Kamera ya digrii 360
- Kamera ya Mkononi
- LiDAR
- Gimbal
Programu ya PC / Kazi za Udhibiti (kama ilivyoelezwa)
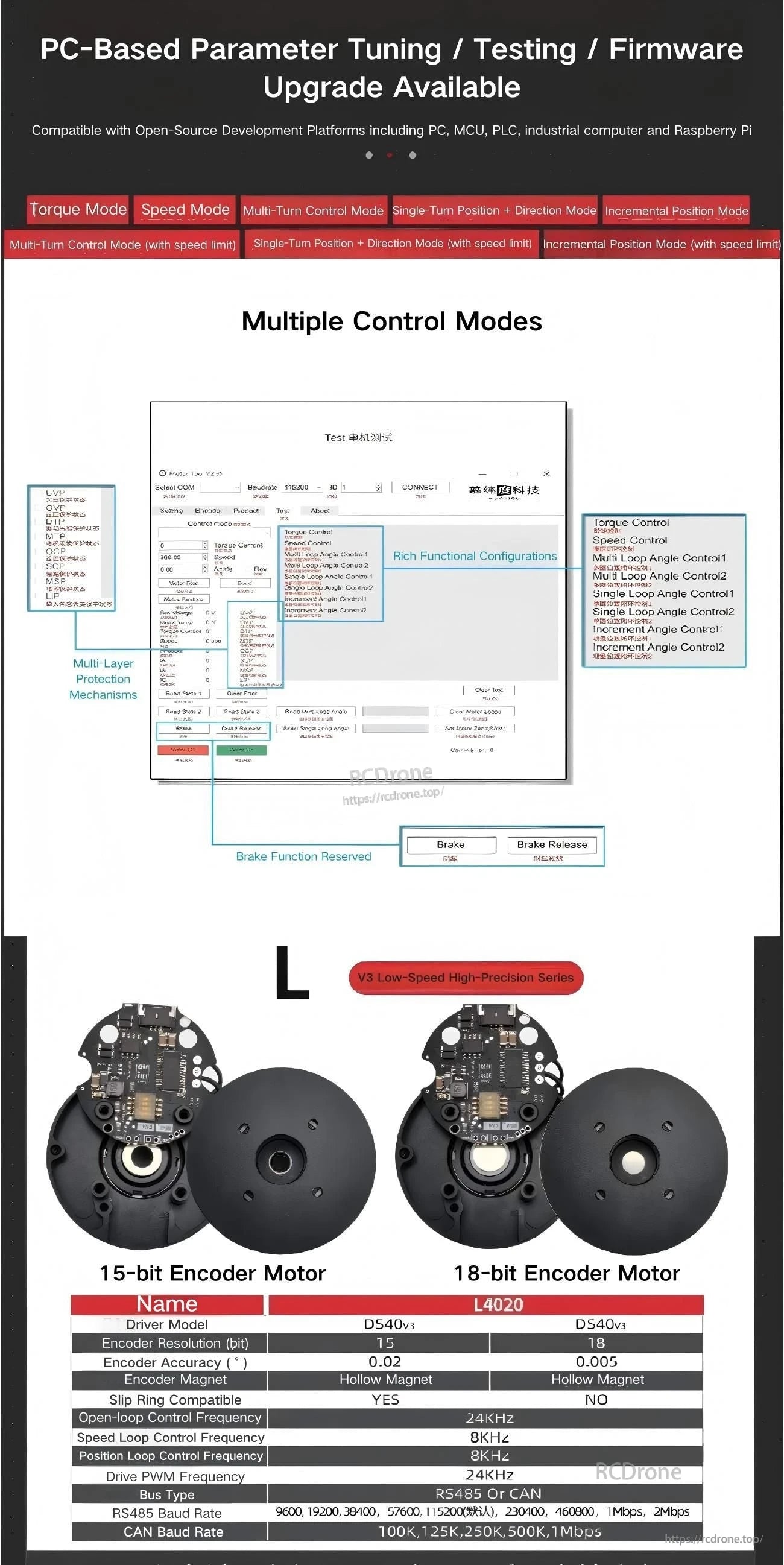
- Uboreshaji wa Parameta / Upimaji / Sasisho la Firmware kwa PC unapatikana
- Inafaa na majukwaa ya maendeleo ya chanzo wazi ikiwa ni pamoja na PC, MCU, PLC, kompyuta za viwandani na Raspberry Pi
- Njia nyingi za Udhibiti: Njia ya Torque; Njia ya Kasi; Njia ya Udhibiti wa Mizunguko Mingi; Njia ya Nafasi ya Mzunguko Mmoja + Mwelekeo; Njia ya Nafasi ya Kuongeza
- Pamoja na chaguzi za kikomo cha kasi kwa: Njia ya Udhibiti wa Mizunguko Mingi; Njia ya Nafasi ya Mzunguko Mmoja + Mwelekeo; Njia ya Nafasi ya Kuongeza
- Mitambo ya ulinzi wa tabaka nyingi
- Kazi ya breki imehifadhiwa (Breki / Kuachia Breki)
Nyaraka
Kwa msaada wa kiufundi, maswali ya uunganisho, au msaada wa hati, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo

Jukwaa la servo motor ndogo lililoundwa kwa ajili ya mwendo wa kasi ya chini, usahihi wa juu katika maeneo madogo.

Umeme wa kuendesha uliojumuishwa unasaidia kudhibiti nafasi kwa usahihi wa juu na kasi ya chini kwa kutumia vifaa na muundo wa motor wenye ufanisi.
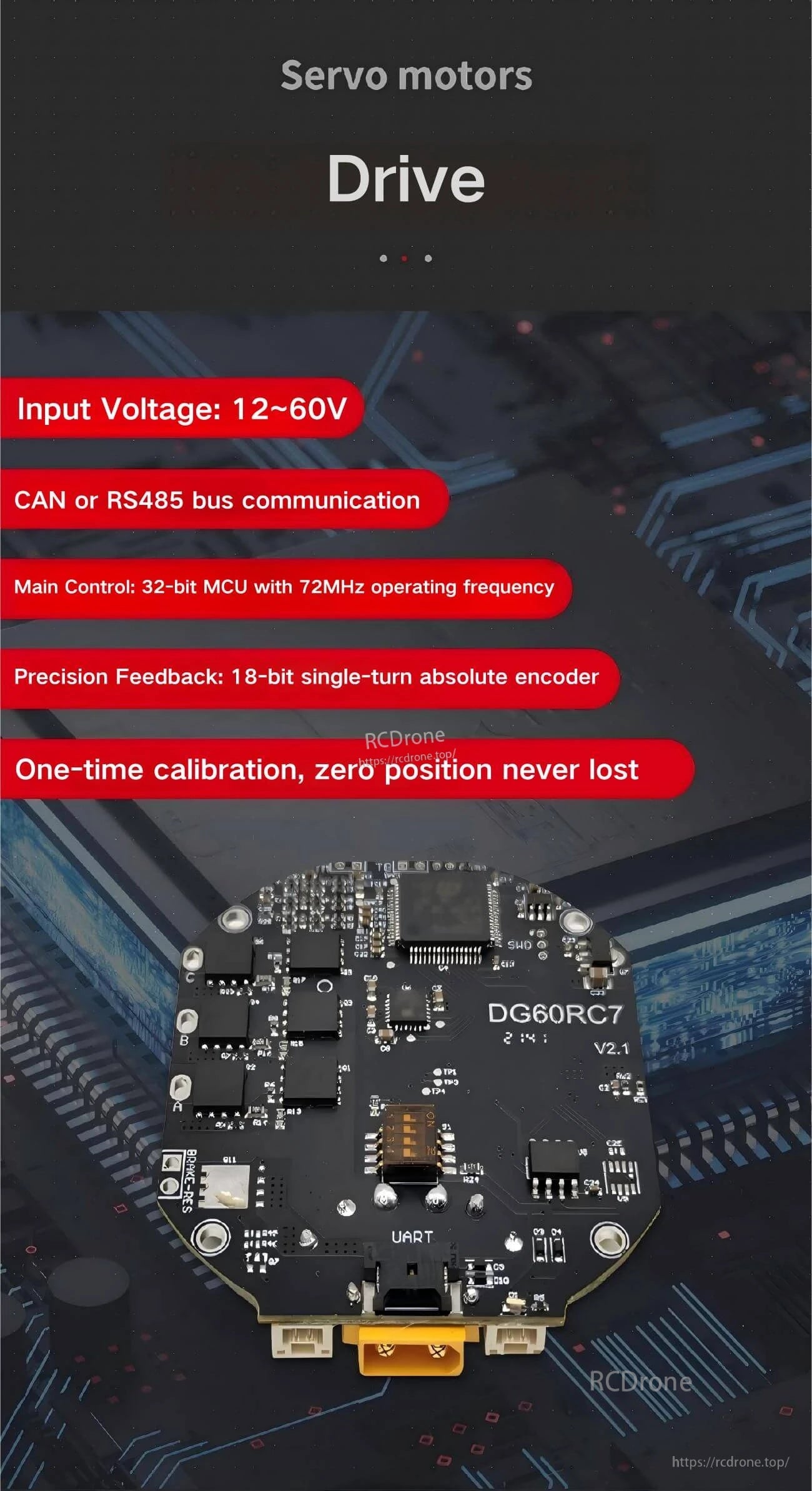
Chagua mawasiliano ya CAN au RS485 na mrejesho wa encoder wa hakika kwa kudhibiti kasi na nafasi kwa haraka.

Uwekaji alama wazi wa kiolesura unarahisisha wiring kwa nguvu, mistari ya CAN/RS485, na muunganisho wa ishara za UART.
Zana za PC zinawezesha kurekebisha vigezo, kupima, na kuboresha firmware katika hali mbalimbali za udhibiti na mipangilio ya encoder.

Related Collections

