

MUWEIDU TS5001-10 Mfumo wa Kuendesha Umeme wa Servo Motor Uliounganishwa 24V 1:10 Sanduku la Gia, RS485/CAN
MUWEIDU TS5001-10 Mfumo wa Kuendesha Umeme wa Servo Motor Uliounganishwa 24V 1:10 Sanduku la Gia, RS485/CAN
MUWEIDU
Regular price
$278.00 USD
Regular price
Sale price
$278.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muonekano
MUWEIDU TS5001-10 ni servo motor (mfumo wa kuendesha umeme uliojumuishwa) ulioandaliwa kwa ajili ya actuators za roboti. Inachanganya motor isiyo na brashi, reducer ya sayari, na kuendesha FOC, na inasaidia udhibiti wa torque/kasi/nafasi kwa mawasiliano ya RS485/CAN.
Vipengele Muhimu
- Mfumo wa kuendesha umeme uliojumuishwa: motor isiyo na brashi + reducer ya sayari + kuendesha FOC
- Njia za udhibiti: Torque / Kasi / Nafasi
- Protokali ya mawasiliano: RS485 / CAN
- Encoder: 18bit + 14bit
- Uwiano wa kupunguza: 1:10
Kwa maswali ya uunganisho (nyaya, mipangilio ya mawasiliano, au faili za CAD), wasiliana na msaada kwa https://rcdrone.top/ au [email protected].
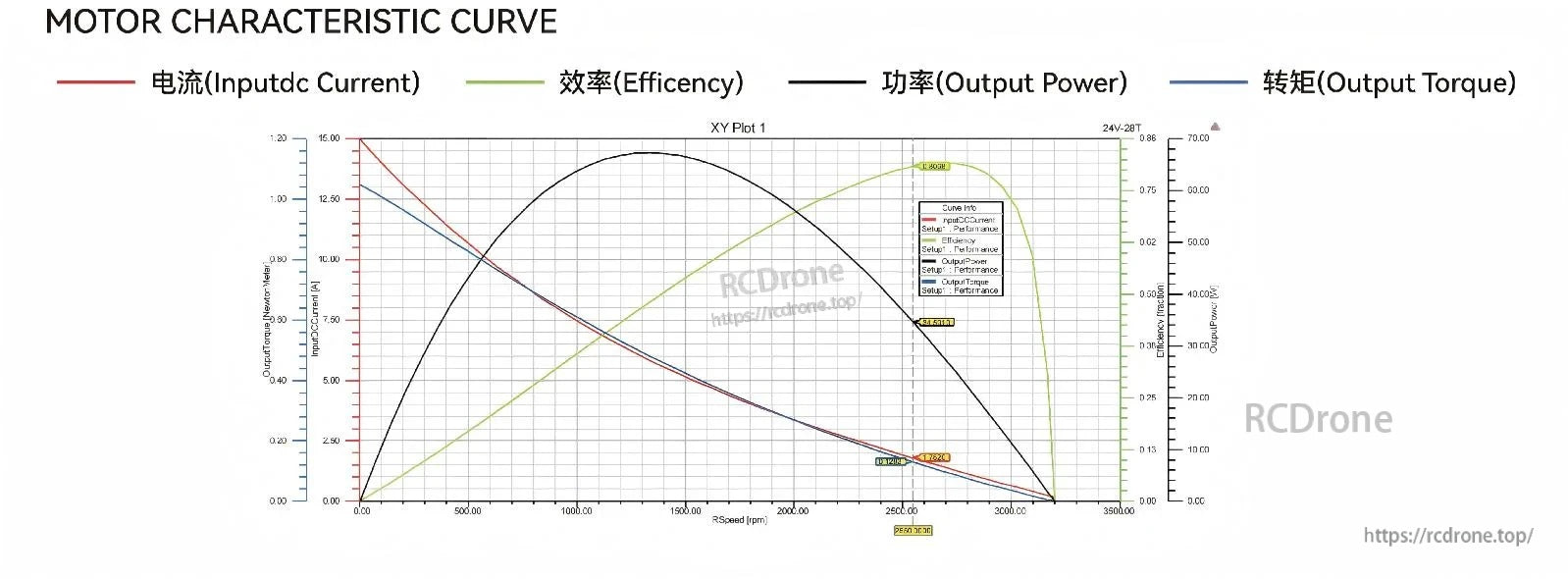
Maelezo ya Kiufundi
| Mfano | TS5001-10 |
| Voltage Iliyoainishwa | 24V |
| Current Iliyoainishwa | 1.6A |
| Nguvu ya Juu | 14W |
| Torque Iliyopimwa | 1 N.m |
| Torque ya Juu | 2.5 N.m |
| Speed iliyopimwa | 255 rpm |
| Encoder | 18bit + 14bit |
| Inertia ya Rotor | 140 gcm^2 |
| Ratio ya Kupunguza | 1:10 |
| Modes za Udhibiti | Torque/Speed/Position |
| Protokali ya Mawasiliano | RS485/CAN |
| Vipimo vya Jumla | Phi53 mm x 36 mm |
| Uzito | 183 g |
Matumizi
- Roboti za kibinadamu
- Michemu za roboti
- Exoskeletons
- Roboti za mguu nne
- Magari ya AGV
- Roboti za ARU
- Roboti za miguu
- Roboti za viwandani
- Magari ya ukaguzi ya roboti
- Roboti za matibabu
Nyaraka
Maelezo

Dereva mdogo wa pamoja unachanganya motor isiyo na brashi, gearbox ya sayari, na kidhibiti cha FOC kwa ajili ya kifaa cha ujenzi.

Imeundwa kwa ajili ya roboti katika majukwaa ya miguu, mikono ya roboti, magari ya ukaguzi, na mifumo ya msaada/medikali.
Related Collections

