

MUWEIDU TS6013-36 24V Motori Ndogo ya Servo yenye Gia 1:36 RS485/CAN Kichanganuzi cha Nafasi cha 18-bit
MUWEIDU TS6013-36 24V Motori Ndogo ya Servo yenye Gia 1:36 RS485/CAN Kichanganuzi cha Nafasi cha 18-bit
MUWEIDU
Couldn't load pickup availability
Muhtasari
MUWEIDU Motor TS6013-36 ni motor ya servo yenye gia ndogo (motors za TS Series) iliyoundwa kama mfumo wa kuendesha umeme uliojumuishwa kwa ajili ya roboti na automatisering. Inajumuisha encoder ya kipekee ya mzunguko mmoja ya bit 18 na inasaidia kuweka sifuri kwa kalibrishaji mara moja tu. Njia za kudhibiti ni pamoja na torque, kasi, na nafasi, zikiwa na mawasiliano ya RS485/CAN.
Vipengele Muhimu
- Motor ya servo yenye gia ndogo (Motors za servo za Mfululizo wa TS)
- Encoder ya kipekee ya mzunguko mmoja ya 18-bit
- Kuweka sifuri kunahitaji kalibra moja tu
- Muundo wa mfumo wa kuendesha umeme uliojumuishwa
- Motor isiyo na brashi yenye nguvu kubwa + reducer ya sayari yenye usahihi wa juu + kuendesha FOC yenye utendaji mzuri
- Njia za kudhibiti: Torque/Speed/Position
- Protokali ya mawasiliano: RS485/CAN
Maelezo ya Kiufundi
| Mfano | TS6013-36 |
| Voltage Iliyoainishwa | 24V |
| Current Iliyoainishwa | 4.4A |
| Nguvu ya Peak | 160W |
| Torque Iliyoainishwa | 13N.m |
| Torque ya Peak | 25N.m |
| Speed iliyopimwa | 54rpm |
| Encoder | 18bit + 14bit |
| Inertia ya Rotor | 850gcm^2 |
| Ratio ya Kupunguza | 1:36 |
| Modes za Udhibiti | Torque/Speed/Position |
| Protokali ya Mawasiliano | RS485/CAN |
| Vipimo vya Jumla | Φ63mm×54.5mm |
| Vipimo vya Jumla (pamoja na breki) | Φ53mm×59mm |
| Uzito | 460g |
| Uzito (pamoja na breki) | 560g |
Matumizi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons
- Roboti za mguu / roboti za miguu
- Magari ya AGV
- Roboti za ARU
- Roboti za viwandani
- Magari ya ukaguzi ya roboti
- Roboti za matibabu
Maelekezo / Upakuaji
- MUWEIDU_TS6013-36_Motor.STP
- MUWEIDU_TS6013-36_Diagramu_ya_muundo_wa_bidhaa.pdf
- MUWEIDU_TS6013-36B_Diagramu_ya_muundo_wa_bidhaa.pdf
Kwa nyaya za wiring, uunganisho, au msaada wa uchaguzi wa mfano, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo
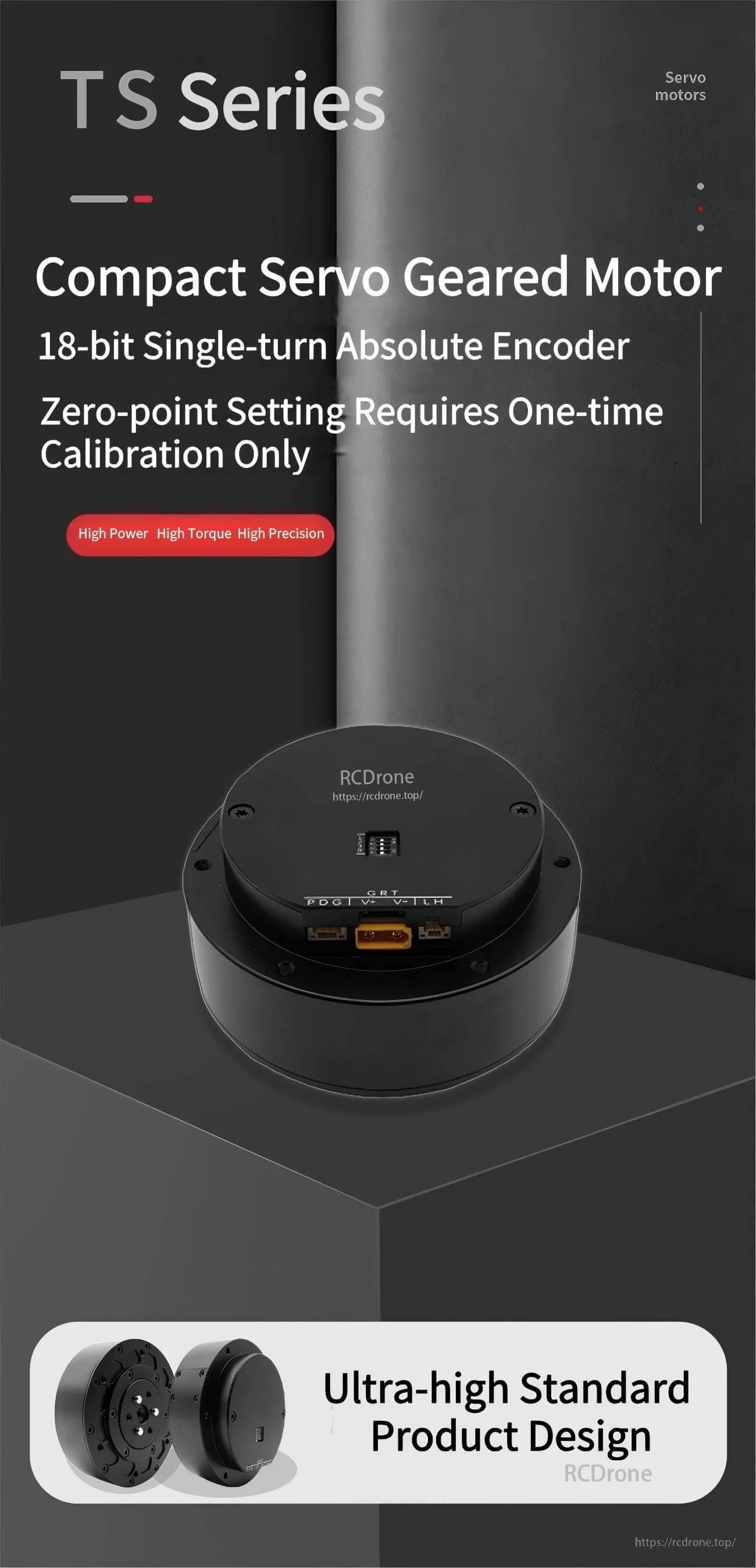
Motor ya servo ya TS Series iliyounganishwa inachanganya ukubwa mdogo na encoder ya 18-bit ya absolute kwa ajili ya kuweka nafasi kwa uthabiti na kurudiwa.
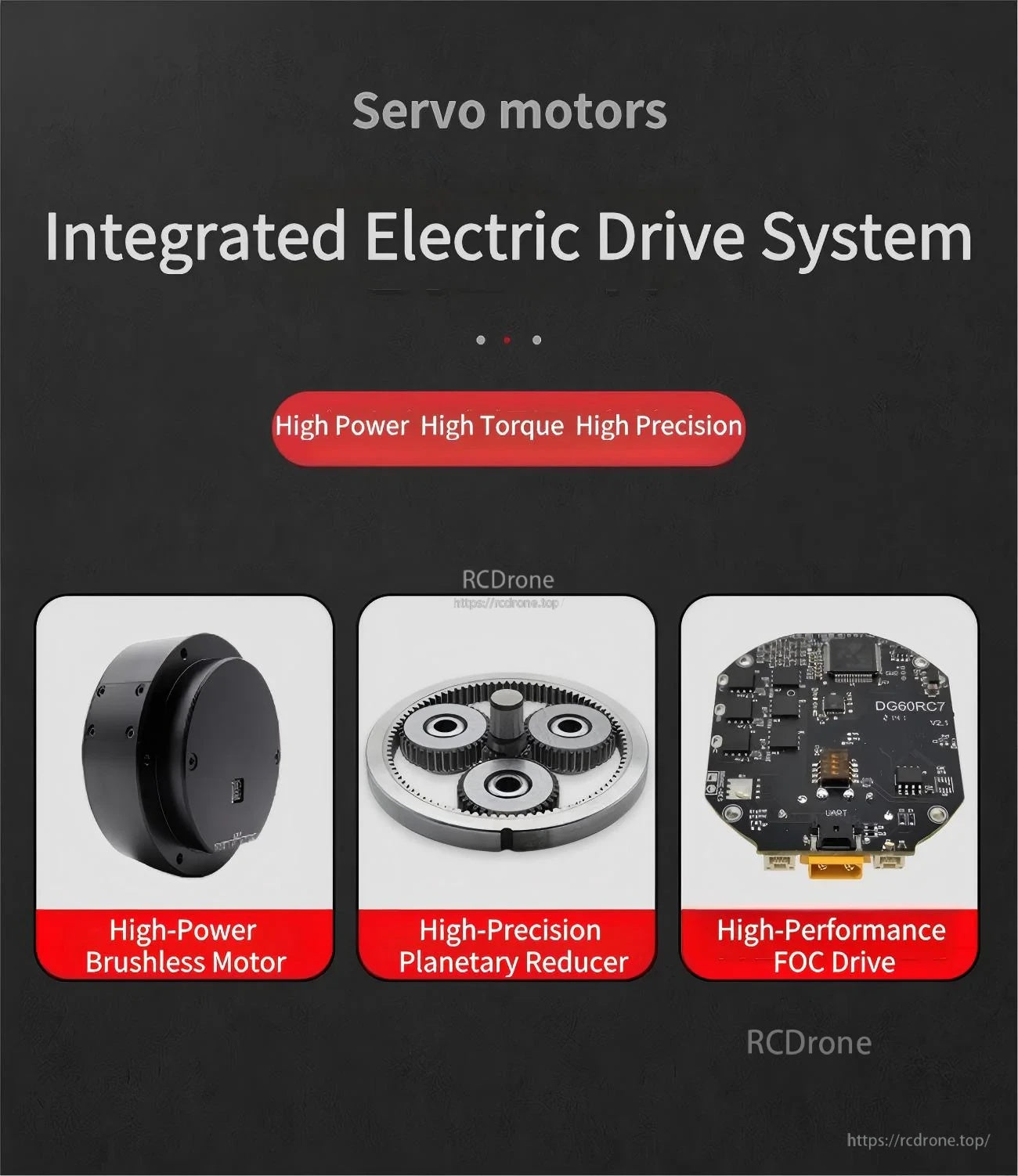
Motor isiyo na brashi, gearbox ya sayari, na elektroniki za kuendesha FOC zimeunganishwa katika kitengo kimoja cha kuendesha ili kurahisisha muundo wa viungo vya roboti.

Related Collections

