

MUWEIDU ZH5030 Motor ya Umeme Iliyounganishwa 16V RS485/CAN Encoder ya biti 19 kwa Roboti
MUWEIDU ZH5030 Motor ya Umeme Iliyounganishwa 16V RS485/CAN Encoder ya biti 19 kwa Roboti
MUWEIDU
Couldn't load pickup availability
Muhtasari
MUWEIDU ZH5030 ni mfumo wa kuendesha umeme uliojumuishwa wa motor ulioandaliwa kwa ajili ya udhibiti wa nafasi wa kasi ya chini na usahihi wa juu. Inasaidia hali za udhibiti wa torque/kasi/nafasi na inatoa mawasiliano ya RS485 au CAN kwa ajili ya ujumuishaji wa roboti na automatisering.
Vipengele Muhimu
- MCU ya utendaji wa juu ya 32-bit: Mfululizo wa MS unafaa kabisa na amri zote za udhibiti za Mfululizo wa MF.
- Inakidhi mahitaji ya udhibiti wa nafasi wa kasi ya chini na usahihi wa juu.
- Karatasi za chuma za silicon za kiwango cha juu na sumaku za kudumu zenye upinzani wa joto la juu zinazotumika kama vifaa vya msingi vya motor.
- Muundo wa rotor wa nje wa hatua nyingi uliofanywa kuwa tambarare unatoa torque ya juu kwa matumizi yenye nafasi finyu.
- Muundo usio na brashi umeunganishwa na kuzaa za utendaji wa juu kwa ajili ya kuzunguka kwa urahisi na maisha marefu ya huduma.
- Upinzani wa aloi wa usahihi wa juu na mabadiliko ya joto ya chini kwa ajili ya sampuli sahihi za sasa na udhibiti.
- Dereva kamili wa N-channel tatu-fazi wa daraja kamili wenye upinzani wa ndani wa chini na pato la sasa kubwa.
- Inasaidia kubadilisha bila mshono kati ya hali za udhibiti wa torque wazi, kasi, na nafasi.
- Uboreshaji wa vigezo / majaribio / sasisho la firmware kwa kutumia PC unapatikana; inafaa na majukwaa ya maendeleo ya chanzo wazi ikiwa ni pamoja na PC, MCU, PLC, kompyuta za viwandani, na Raspberry Pi.
Maelezo ya Kiufundi
| Mfano | ZH5030 |
| Voltage Iliyoainishwa | 16V |
| Current Iliyoainishwa | 1.35A |
| Nguvu ya Peak | 12W |
| Torque Iliyoainishwa | 0.24 N.m |
| Torque ya Peak | 0.53 N.m |
| Speed iliyopimwa | 440 rpm |
| Encoder | 19 bit |
| Inertia ya Rotor | 202 gcm^2 |
| Ufuatiliaji wa Joto la Motor | NDIYO |
| Modes za Udhibiti | Torque / Speed / Position |
| Protokali ya Mawasiliano | RS485 au CAN |
| Vipimo vya Jumla | Dia. 49 mm x 28.9 mm |
| Uzito | 145 g |
Maelezo ya Kiunganishi
- ID swichi: ID SWITCH
- Kiunganishi cha mawasiliano: CAN/RS485
| Kiunganishi | Kumbuka |
|---|---|
| B/L | RS485-B au CAN-L |
| A/H | RS485-A au CAN-H |
| V- | Chanzo cha nguvu hasi |
| V- | Chanzo cha nguvu hasi |
| V+ | Chanzo cha nguvu chanya |
| V+ | Chanzo cha nguvu chanya |
| T | Transmitter wa UART |
| R | Receiver wa UART |
| G | Signal GND |
Matukio ya Maombi
- Roboti za kibinadamu
- Mikono ya roboti
- Exoskeletons
- Roboti wa mguu nne
- Magari ya AGV
- Roboti za ARU
- Kamera ya 360°
- Kamera ya mkono
- LiDAR
- Pod gimbal
Kwa mwongozo wa uunganisho na msaada wa agizo, wasiliana na [email protected] or tembelea https://rcdrone.top/ .
Mwongozo / Hati
Maelezo

Imepangwa kwa ajili ya mwendo wa kasi ya chini, usahihi wa juu, ZH5030 inachanganya motor isiyo na brashi na umeme wa kuendesha katika kitengo kimoja kidogo.

Uwekaji wazi wa pini na swichi ya ID iliyopo kwenye bodi husaidia kurahisisha wiring ya RS485 au CAN ya nodi nyingi wakati wa kuunganisha.
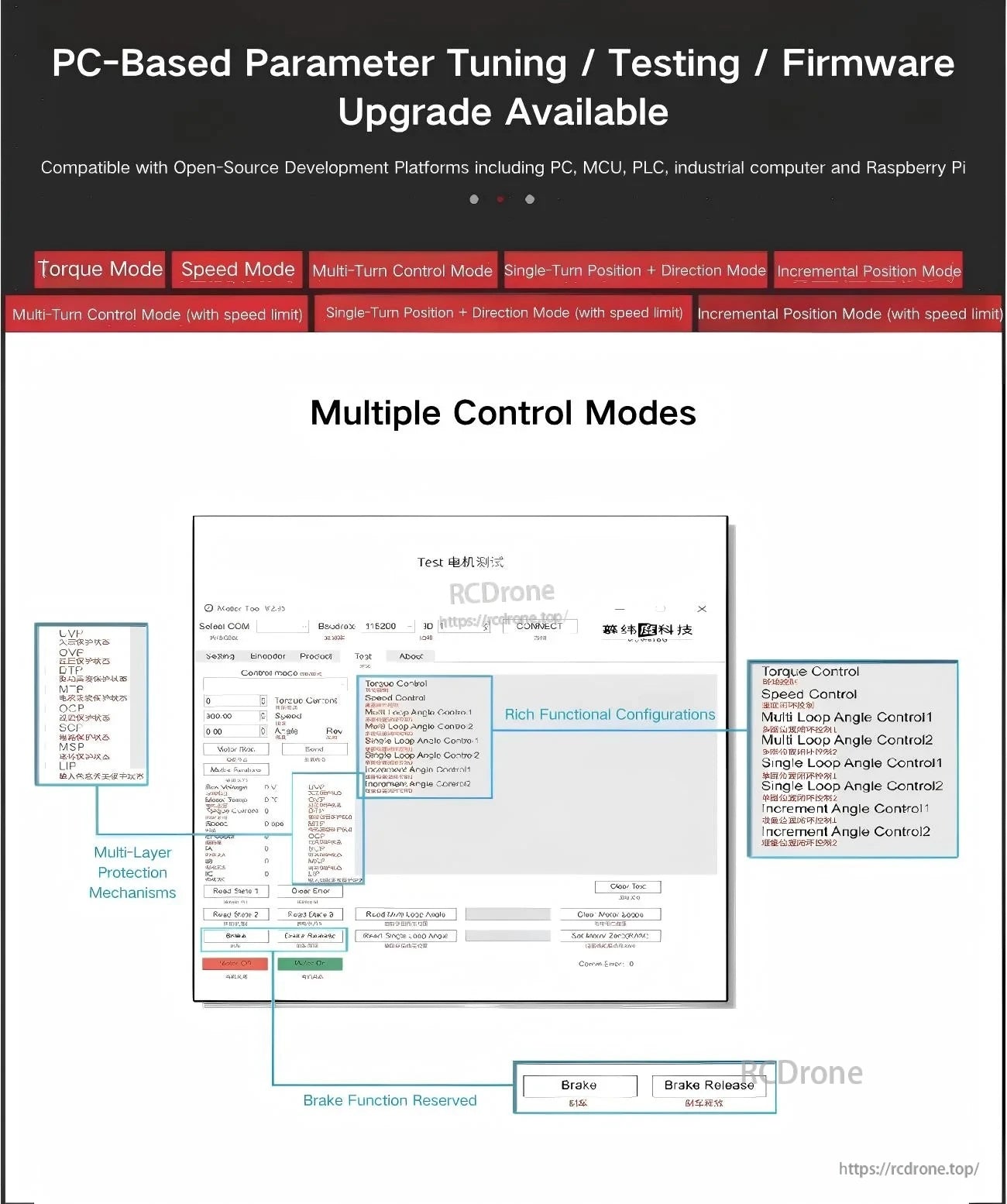
Zana za msingi za PC zinasaidia kubadilisha vigezo, majaribio, na masasisho ya firmware, zikiwa na hali za kudhibiti torque, kasi, na nafasi zinazoweza kuchaguliwa.

Related Collections

