






MyActuator RMD-X4-10 Kiendeshi cha Mzunguko wa Sayari 10N·m Encoder Mbili EtherCAT+CAN Kiendeshi cha Kifundo cha Roboti
MyActuator RMD-X4-10 Kiendeshi cha Mzunguko wa Sayari 10N·m Encoder Mbili EtherCAT+CAN Kiendeshi cha Kifundo cha Roboti
MyActuator
Couldn't load pickup availability
Muhtasari
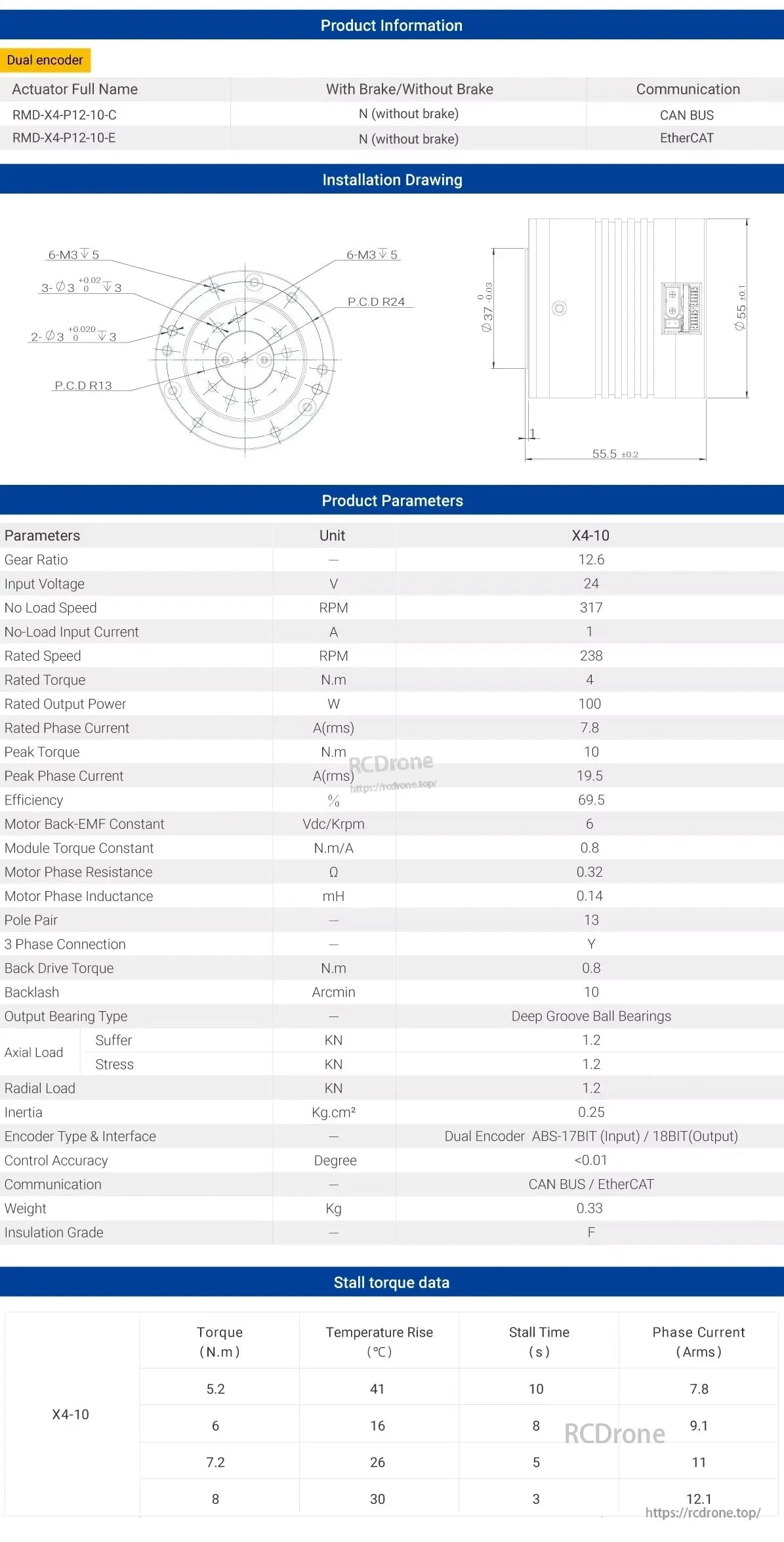
Moduli ya MyActuator RMD-X4-10 actuator ya sayari ni moduli ya motor ya DC yenye utendaji wa juu iliyoundwa kwa ajili ya matumizi ya kisasa ya roboti. Imejumuisha uwiano wa gia ya sayari wa 12.6:1, torque ya kilele ya 10N·m, na nguvu ya pato iliyokadiriwa ya 100W, inajumuisha mfumo wa encoder mbili (ingizo la 17-bit / pato la 18-bit) ambao unatoa udhibiti wa usahihi wa 0.01°. Muundo wake wa ndani mkubwa unasaidia ujumuishaji wa sensorer nyingi, ukifanya kuwa kitovu cha kudhibiti mkao wa mwili mzima katika roboti za kibinadamu. Pamoja na EtherCAT na CAN mawasiliano ya itifaki mbili, actuator inapata majibu ya haraka sana ya 250μs, na kuifanya kuwa bora kwa hali zenye nguvu kubwa na uaminifu wa juu kama vile roboti za kibinadamu, injini za mguu za bioniki, na automatisering ya viwandani.
Vipengele Muhimu
-
Encoder Mbili za Usahihi wa Juu: ingizo la 17-bit / pato la 18-bit lenye 0.01° usahihi
-
Torque ya Peak 10N·m na uwiano wa gia ya sayari 12.6:1
-
Mpira wa Roller ulio Vuka: Uwezo wa kipekee wa kupambana na mzunguko wa kupinda kwa viungo vya roboti vya kudumu
-
EtherCAT + CAN Bus Mawasiliano Mawili: Inasaidia uhusiano wa mashine nyingi, majibu ya haraka sana ya 250μs
-
Muundo Mkubwa wa Hollow: Inaruhusu kuunganishwa kwa sensorer, nyaya, na pete za kuteleza kwa mifumo tata ya roboti
-
Uaminifu wa Juu: Imeundwa kwa udhibiti wa mtembezi wa kibinadamu, mabadiliko laini kwa kukimbia, kuruka, na harakati tata
-
Compact & Nyepesi: Φ55mm × 55.5mm, uzito 0.33kg
Maelezo
| Kigezo | Thamani |
|---|---|
| Mfano | RMD-X4-10 |
| Uwiano wa Gear | 12.6:1 |
| Voltage ya Kuingiza | 24V DC |
| Speed ya Kadirio | 238 RPM |
| Speed bila Load | 317 RPM |
| Nguvu ya Kadirio ya Kutoka | 100W |
| Torque ya Kadirio | 4N·m |
| Torque ya Peak | 10N·m |
| Current ya Kadirio | 7.84A |
| Current ya Bila Mkojo | 1A |
| Aina ya Encoder | Encoder Mbili (ABS-17bit / 18bit) |
| Mawasiliano | EtherCAT + CAN Bus |
| Uzito | 0.33kg |
| Ukubwa | Ø55mm × 55.5mm |
Maombi
-
Roboti za Kibinadamu – Mifumo ya pamoja kwa mikono, miguu, na torso
-
Mifumo ya Mguu wa Bioniki – Torque ya juu na muundo wa kupambana na kupinda kwa mbio na kuruka
-
Roboti za Ushirikiano – Udhibiti wa mwendo laini kwa automatisering ya viwanda
-
Exoskeletons – Vifaa vyepesi, vya nguvu kubwa kwa vifaa vya kusaidia binadamu
-
Mistari ya Uzalishaji Inayobadilika – Usawazishaji wa multi-axis kupitia mawasiliano ya kasi ya EtherCAT
Ufungashaji & Vifaa
-
Ugavi wa Nguvu + Kebuli ya Mawasiliano ya CAN Bus ×1
-
120Ω Upinzani wa Terminal ×1
EtherCAT Cable ya Mawasiliano ×2
-
Moduli ya Mawasiliano ya CAN Bus ×1 (adaptari ya USB-CAN inajumuishwa kwa kila agizo)
Vipimo vya Ufungaji: 100mm × 100mm × 70mm
Maelezo

RMD-X4-PT2.5-10-C dual encoder roboti kiungo cha kuendesha chenye ingizo la 24V, uwiano wa gia 12.6, torque ya 4N·m, na pato la 100W. Ina vipengele vya CAN BUS/EtherCAT, kasi isiyo na mzigo ya 317RPM, na uzito wa 0.28kg. Inajumuisha vipimo vya usakinishaji na specs za kiufundi.

Actuator ya sayari yenye torque ya kilele ya 10N.m, uwiano wa gia 12.6:1, uzito wa 0.33kg. Ukubwa: Ø55mm×55.5mm. Ina vipengele vya mawasiliano ya EtherCAT/CANBUS, encoder mbili, MCU ya kasi ya juu, chips za CAN, na mpira wa kuzaa wa groove ya kina.

Encoder Mbili ABS-17BIT Ingizo / 18BIT Pato, X4-10, SN:40225621, MYACTUATOR

Actuator ya Sayari ya RMD-X4-10 ya MYACTUATOR inatoa nguvu ya 100W, torque ya 46Nm, encoder mbili, kasi ya 238rpm. Inakuja na nguvu + kebo ya CAN BUS, resistor ya 120Ω, kebo ya EtherCAT, moduli ya CAN BUS, na adapta ya bure ya USB-CAN.
RMD-X4-10 Actuator ya Roboti ya Sayari ina encoder mbili, 12.6 uwiano wa gia, 24V ingizo, 100W pato, na CAN BUS/EtherCAT. Inatoa 4N.m torque, kasi ya 238 RPM, inazito 0.33kg, na inatumia mpira wa kuzaa wa groove ya kina kwa ufanisi wa juu.

Kiunganishi cha X4-10 kinajumuisha nguvu, CAN, na bandari za EtherCAT. Ufungashaji unajumuisha chanzo cha nguvu, nyaya, upinzani, na moduli. Vipimo: 100x100x70mm. Inajumuisha adapta ya USB-CAN na kila agizo.

Vifaa vya X4-10 vinajumuisha chanzo cha nguvu, nyaya za CAN BUS na EtherCAT, upinzani wa mwisho, na moduli ya CAN BUS. Maelezo yanashughulikia viunganishi, kazi za waya, mistari ya ishara, na maelezo ya adapta ya USB-CAN.
Related Collections






