





MyActuator RMD-X4-36 34N·m Kiendeshi cha Mzunguko wa Sayari DC Brushless Motor yenye Encoder Mbili, EtherCAT & CAN Bus, Uwiano wa Gia 36:1
MyActuator RMD-X4-36 34N·m Kiendeshi cha Mzunguko wa Sayari DC Brushless Motor yenye Encoder Mbili, EtherCAT & CAN Bus, Uwiano wa Gia 36:1
MyActuator
Couldn't load pickup availability
Muhtasari
MyActuator RMD-X4-36 Planetary Actuator DC Brushless Motor ni actuator ya pamoja yenye utendaji wa juu iliyoundwa kwa ajili ya mifumo ya roboti na automatisering inayohitaji udhibiti sahihi wa mwendo, pato kubwa la torque, na uunganisho wa kompakt. Ikiwa na 34N·m peak torque, 36:1 gear ratio, na muundo wa bearing wa roller iliyovuka, inatoa uwezo mzuri wa kupambana na upindaji na kuegemea. Ikiwa na EtherCAT + CAN protokali za mawasiliano mbili na 250μs majibu ya haraka sana, actuator hii ni bora kwa roboti za kibinadamu, mikono ya roboti, majukwaa ya simu, na matumizi mengine ya roboti ya kisasa. Muundo wake wa encoder mbili (ABS 17-bit input / 18-bit output) unahakikisha usahihi wa juu wa kuweka nafasi, wakati ukubwa mdogo (55mm × 61mm, 0.36kg) unaruhusu uunganisho mwepesi na wenye ufanisi.
Vipengele Muhimu
-
Encoder Mbili za Usahihi wa Juu: 17-bit (ingizo) + 18-bit (toleo) kwa usahihi wa 0.01°.
-
Protokali za EtherCAT + CAN Bus: Mawasiliano ya kubadilika na majibu ya haraka ya 250μs.
-
Vikanda vya Roller Vilivyovuka: Utendaji bora wa kupambana na upindaji na maisha marefu ya huduma.
-
Ufanisi wa Nguvu wa Juu: Kipenyo kidogo cha 55mm, urefu wa 61mm, na uzito wa 0.36kg pekee.
-
Torque ya Kilele 34N·m na Torque Iliyopangwa 11.5N·m inahakikisha mzunguko thabiti na wenye nguvu.
-
Ufanisi wa Juu: Nguvu iliyopangwa ya 100W na teknolojia ya FOC (Field-Oriented Control) yenye laini.
-
Matumizi Mbalimbali: Imeundwa kwa ajili ya roboti za kibinadamu, mifupa ya nje, manipulators, na mifumo ya automatisering.
Specifikesheni
| Parameta | Thamani |
|---|---|
| Mfano | RMD-X4-P36-36-C |
| Voltage ya Kuingiza | 24V |
| Uwiano wa Gear | 36:1 |
| Speed ya Bila Load | 111 RPM |
| Current ya Bila Load | 0.9 A |
| Speed ya Kadirio | 83 RPM |
| Torque ya Kadirio | 11.5 N·m |
| Power ya Kadirio ya Kutoka | 100 W |
| Torque ya Peak | 34 N·m |
| Current ya Peak ya Awamu | 21.5 A (rms) |
| Jozi za Nguzo | 13 |
| Aina ya Encoder | Dual Encoder ABS 17-bit (Input) / 18-bit (Output) |
| Protokali za Mawasiliano | EtherCAT / CAN Bus |
| Ukubwa | Ø55mm × 61mm |
| Uzito | 0.36 kg |
Maudhui ya Kifurushi
-
1 × RMD-X4-36 Motor ya Actuator ya Kijidudu
-
1 × Ugavi wa Nguvu + Kebuli ya Mawasiliano ya CAN Bus
-
1 × Upinzani wa Terminal 120Ω
-
2 × Kebuli za Mawasiliano za EtherCAT
-
1 × Moduli ya Mawasiliano ya CAN Bus (adaptari ya USB-CAN)
Matumizi
-
Roboti za kibinadamu na bionic
-
Mikono ya roboti ya ushirikiano
-
Exoskeletons na roboti za urejeleaji
-
Roboti za huduma na majukwaa ya simu
-
Mifumo ya automatisering ya usahihi inayohitaji actuators ndogo zenye nguvu kubwa
Maelezo

Actuatori wa sayari wenye 34N.m nguvu ya kilele, uwiano wa gia 36:1, 0.36kg uzito, Ø55mm×61mm ukubwa. Ina sifa za mawasiliano ya EtherCAT/CANBUS, encoder mbili, MCU ya kasi kubwa, chips za CAN, na kuzaa kwa roller zilizovuka.

Motor ya RMD-X4-P36-36: 24V, 10.5N.m torque, 83RPM, encoder mbili, EtherCAT+CAN BUS, uwiano wa gia 36, 0.36kg, encoder ya ABS-17BIT/18BIT, vipimo vya kina vimejumuishwa.

Motor ya X4-36, 100W, 12N.m, encoder mbili, 17BIT ingizo, 18BIT pato, 63rpm, uwiano wa gia 1:36, interface ya CAN bus, kiashiria cha LED.

Motor ya MYACTUATOR X4-36, 100W, 12N.m, encoder mbili, 83rpm, uwiano wa 1:36. Inajumuisha chanzo cha nguvu, kebo ya CAN BUS, resistor ya 120Ω, nyaya za EtherCAT, na moduli ya CAN BUS yenye adapter ya bure ya USB-CAN.
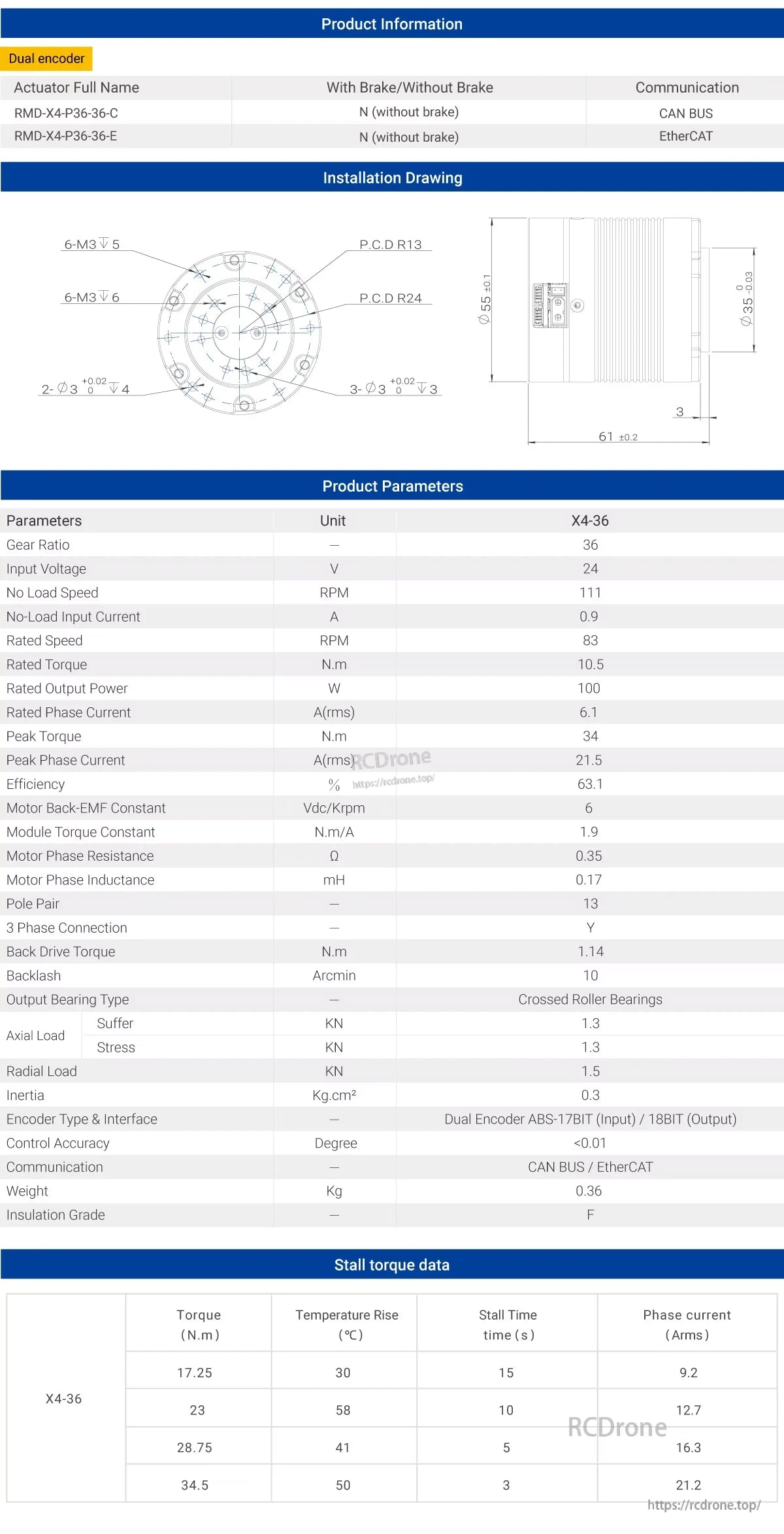
Motor ya RMD-X4-P36-36 ina encoder mbili, uwiano wa gia 36, ingizo la 24V, pato la 100W, CAN BUS/EtherCAT. Torque iliyopangwa: 10.5 N.m, kasi: 83 RPM, uzito: 0.36 kg. Takwimu za torque ya kusimama zinajumuisha torque, kuongezeka kwa joto, muda, na thamani za sasa za awamu.

Maelezo ya kiunganishi yanajumuisha nguvu, CAN, na bandari za EtherCAT. Ufungashaji una motor, nyaya, upinzani, na moduli za mawasiliano. Vipimo: 100x100x70mm. Inajumuisha adapter ya USB-CAN.
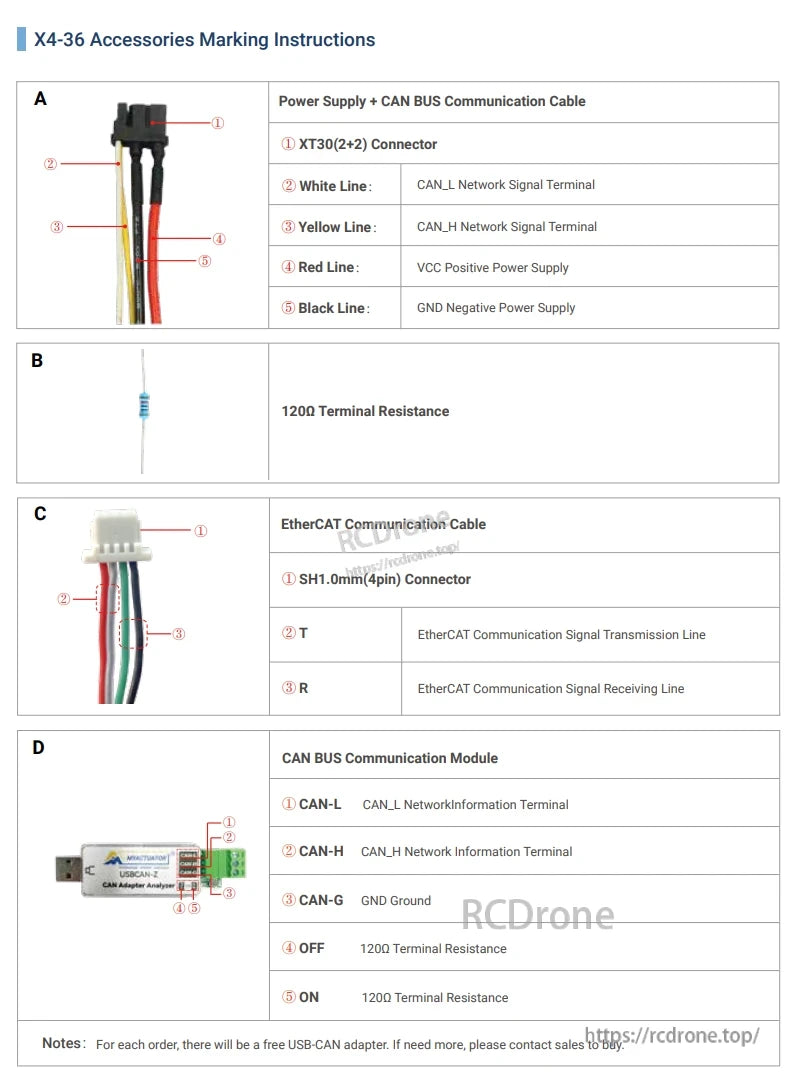
Vifaa vya X4-36 vinajumuisha chanzo cha nguvu, CAN BUS, nyaya za EtherCAT, upinzani wa 120Ω, na moduli ya CAN. Maelezo yanashughulikia viunganishi, rangi za nyaya, mistari ya ishara, na mipangilio ya terminal kwa mawasiliano na viunganishi vya nguvu. Adapter ya USB-CAN inajumuishwa na kila agizo.
Related Collections





