





MyActuator RMD-X6-60 Kichocheo cha Servo chenye Encoder Mbili 320W 20N·m 60N·m Kilele 48V EtherCAT CAN BUS Motor ya Pamoja ya Roboti ya Usahihi wa Juu
MyActuator RMD-X6-60 Kichocheo cha Servo chenye Encoder Mbili 320W 20N·m 60N·m Kilele 48V EtherCAT CAN BUS Motor ya Pamoja ya Roboti ya Usahihi wa Juu
MyActuator
Couldn't load pickup availability
Overview
MyActuator RMD-X6-60 ni actuator ya servo ya akili yenye ukubwa mdogo, yenye utendaji wa juu, iliyoundwa kwa ajili ya roboti, automatisering, na matumizi ya kudhibiti mwendo kwa usahihi. Imewekwa na vifaa vya mawasiliano vya EtherCAT na CAN BUS na mfumo wa encoders mbili, actuator hii inatoa wingi wa torque, udhibiti sahihi, na usimamizi wa mwendo wa njia nyingi. Inafaa kwa viungo vya roboti, mikono ya roboti, roboti za kusafiri, na mifumo ya automatisering ya viwandani inayohitaji usahihi na uaminifu wa juu.
Parameta Muhimu:
-
Nguvu Iliyopangwa: 320W
-
Torque Iliyopangwa: 20N·m
-
Torque ya Juu: 60N·m
-
Speed Iliyopangwa: 153RPM
-
Uwiano wa Gear: 19.612:1
-
Usahihi wa Encoder Mbili: 17bit Ingizo / 17bit Matokeo
-
Itifaki za Mawasiliano: CAN BUS, EtherCAT
-
Voltage ya Ingizo: 48V
Vipengele Muhimu
-
Muundo wa Encoder Mbili
Inajumuisha encoders za ingizo na matokeo za 17-bit zinazotoa mrejesho sahihi kwa udhibiti sahihi wa mwendo na ufuatiliaji wa hali. -
Usaidizi wa Itifaki Nyingi
Interfaces za EtherCAT na CAN BUS zilizojengwa ndani zinahakikisha ufanisi mpana na vifaa tofauti vya udhibiti wa roboti na automatisering. -
Upeo wa Nguvu na Torque ya Juu
Inauwezo wa kutoa 320W nguvu endelevu na 60N·m torque ya kilele, ikikidhi mahitaji ya matumizi ya nguvu na mizigo mizito. -
Njia za Kudhibiti Mseto
Inasaidia udhibiti wa nafasi, kasi, na torque mseto, ikiruhusu mifumo ya harakati ya viwango vingi na iliyoratibiwa. -
Maoni ya Juu ya Usahihi na Majibu ya Haraka
MCU ya kasi ya juu iliyounganishwa na waandishi wa habari wa CAN hutoa majibu ya kiwango cha millisecond kwa udhibiti sahihi. -
Muundo wa Compact na Mwepesi
Vipimo vya 120mm × 120mm × 80mm na uzito wa 0.82kg vinaufanya kuwa bora kwa matumizi ya roboti mwepesi ambapo nafasi na uzito ni muhimu.
Maelezo ya Kiufundi
| Parameta | Thamani |
|---|---|
| Mfano | RMD-X6-P20-60-C |
| Voltage ya Kuingiza | 48V |
| Nguvu Iliyoainishwa | 320W |
| Torque Iliyoainishwa | 20N·m |
| Torque ya Juu | 60N·m |
| Speed Iliyoainishwa | 153RPM |
| Speed Bila Load | 176RPM |
| Current Iliyoainishwa | 9.5A (RMS) |
| Current Bila Load | 0.9A |
| Current ya Juu | 29.1A (RMS) |
| Uwiano wa Gear | 19.612:1 |
| Jozi za Pole | 10 |
| Azimio la Encoder | Ingizo: 17bit / Kutoka: 17bit |
| Uzito | 0.82kg |
Maelezo ya Kiolesura
Bandari za Nguvu na Mawasiliano
| Bandari | Maelezo |
|---|---|
| EtherCAT_OUT | Bandari ya EtherCAT ya kutoa |
| EtherCAT_IN | Bandari ya EtherCAT ya kupokea |
| CAN_L | Terminal ya ishara ya CAN ya chini |
| CAN_H | Terminal ya ishara ya CAN ya juu |
| GND | Ugavi wa nguvu hasi |
| VCC | Ugavi wa nguvu chanya |
Terminal za Ishara
R+/R-: Takwimu za maoni kutoka kwa moduli hadi kituo kikuu
-
T+/T-: Ishara za amri za kudhibiti kutoka kituo kikuu hadi moduli
Vipimo na Muundo
-
Upeo: 120mm
-
Kimo: 80mm
-
Shimo za Kuweka: P.C.D R26.25 na R22 zikiwa na mashimo 12 × M4 yenye nyuzi
-
Shat ya Kutolea: Kiunganishi cha flange cha kawaida kwa ajili ya kuunganishwa kwa kubadilika na vipengele vya nje
Habari za Ufungashaji
| Vitu Vilivyomo | Kiasi |
|---|---|
| Ugavi wa Nguvu + Kebuli ya Mawasiliano ya CAN BUS | 2 pcs |
| Kebuli ya Mawasiliano ya EtherCAT | 2 pcs |
| Upinzani wa Terminal 120Ω | 1 pc |
| Moduli ya Mawasiliano ya CAN BUS (Adaptari ya USB-CAN) | 1 pc |
Vipimo vya Ufungashaji:
-
Urefu × Upana × Kimo: 120mm × 120mm × 80mm
Vifaa na Mifumo
Usambazaji wa Nguvu + Kebuli ya CAN BUS
-
Kiunganishi: XT30 (2+2)
-
Line ya White: ishara ya CAN_L
-
Line ya Yellow: ishara ya CAN_H
-
Line ya Red: usambazaji wa nguvu chanya VCC
-
Line ya Black: usambazaji wa nguvu hasi GND
Kebuli ya Mawasiliano ya EtherCAT
-
Kiunganishi: SH1.0mm (4-pin)
-
Mstari wa T: Uhamasishaji wa ishara ya mawasiliano ya EtherCAT
-
Mstari wa R: Kupokea ishara ya mawasiliano ya EtherCAT
Moduli ya CAN BUS
-
Vituo: CAN_L, CAN_H, CAN_G, na kumaliza 120Ω kumaliza (ON/OFF)
-
Adaptari ya USB-CAN inatolewa bure na kila agizo
Matumizi
-
Viungo vya Roboti za Ushirikiano
-
Roboti za Huduma na za Binadamu
-
Mifumo ya Kuelekeza au Kuendesha Roboti za Simu
-
Michemu ya Roboti za Viwandani
-
Mifumo ya Kudhibiti Harakati za Juu ya Usahihi
Majukwaa ya Utafiti na Elimu
Muhtasari
Actuator ya MyActuator RMD-X6-60 inajumuisha encoders mbili za usahihi wa juu, itifaki za mawasiliano za EtherCAT na CAN BUS, wingi wa torque wa juu, na muundo mdogo, ikifanya kuwa suluhisho la kubadilika na la kuaminika kwa robotics na automatisering ya viwandani.Kwa 320W nguvu, 60N·m torque ya juu, na 17-bit high-resolution feedback, actuator hii ya servo inatoa utendaji bora na usahihi wa udhibiti kwa miradi ya kisasa ya roboti.
Maelezo
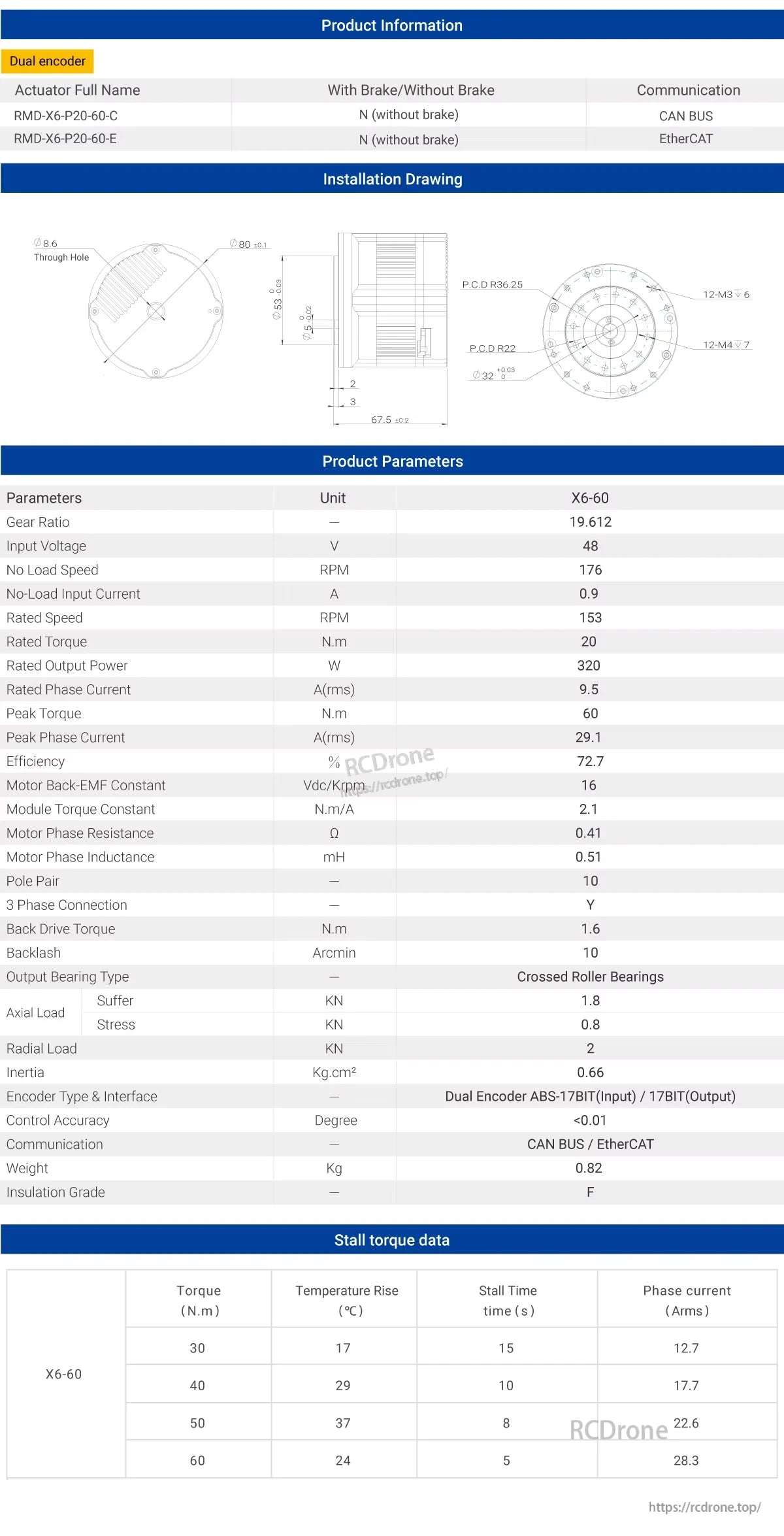
Actuator ya servo RMD-X6-60 ina encoder mbili, uwiano wa gia 19.612, ingizo la 48V, nguvu ya 320W, mawasiliano ya CAN BUS/EtherCAT, 20 N.m torque iliyokadiriwa, 60 N.m torque ya juu, na uzito wa 0.82 kg.
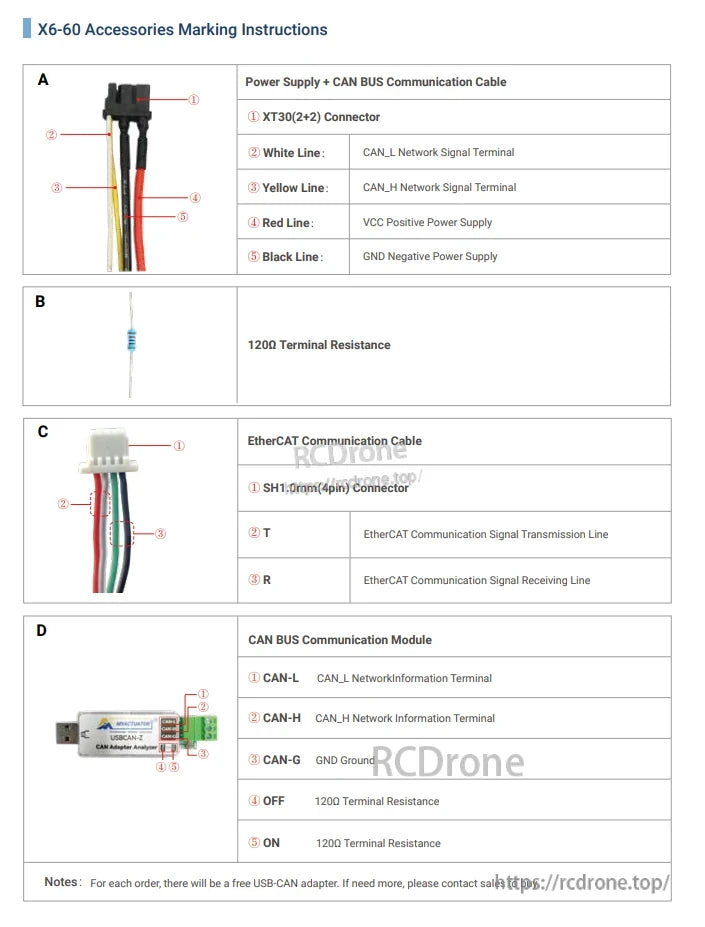
Vifaa vya X6-60 vinajumuisha kebo ya nguvu na CAN BUS yenye nyaya zenye rangi, upinzani wa terminal 120Ω, kebo ya EtherCAT yenye mistari ya T/R, na moduli ya CAN BUS yenye terminal za CAN-L, CAN-H, GND, na mipangilio ya upinzani wa terminal. Adaptari ya USB-CAN bure inajumuishwa kwa kila agizo.

Actuator ya servo RMD-X6-P20-60-C yenye EtherCAT+CAN BUS, 19.612 uwiano, 48V ingizo, 153RPM kasi iliyoainishwa, 20Nm torque, 320W pato, encoder mbili, MCU ya kasi ya juu na chip ya CAN, bearing ya roller iliyovuka.
Encoder Mbili ABS-17BIT Ingizo/Toleo, X6-60 Servo Actuator, 300W, 20N.m, 128rpm, inasaidia udhibiti wa nguvu-na-nafasi mchanganyiko, udhibiti sahihi wa torque.
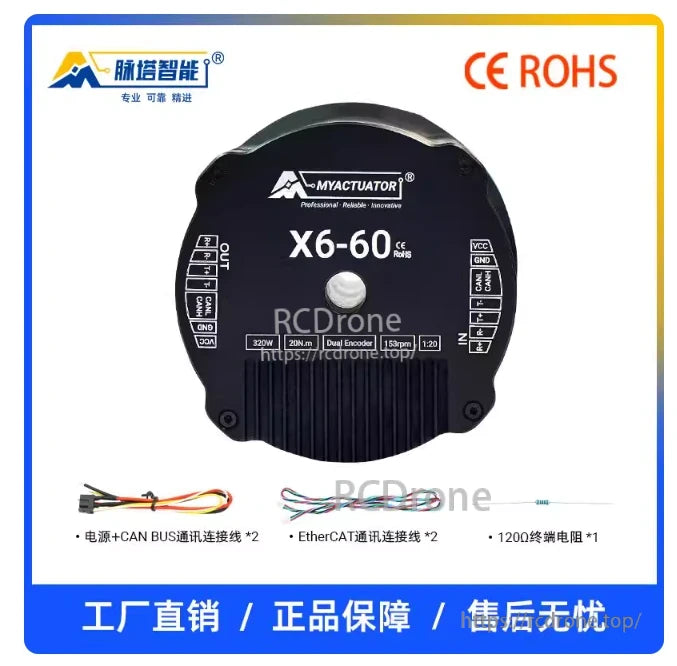
X6-60 servo actuator, 320W, 20N.m, encoder mbili, 158rpm, uwiano wa 1:20, pamoja na nyaya za CAN BUS na EtherCAT, 120Ω terminator, CE ROHS imethibitishwa.

Ufungashaji wa RMD-X6-60 Servo Actuator ukiwa na wiring ya CAN BUS, kebo ya nguvu, na upinzani wa kumaliza 1200.
Related Collections





