





OYMotion ROH-AP001 Mkono wa Roboti wa Ustadi, DOF 6, viungo 11, vihisi vya nguvu, UART/RS485/CAN, udhibiti wa PID, 0.7 s
OYMotion ROH-AP001 Mkono wa Roboti wa Ustadi, DOF 6, viungo 11, vihisi vya nguvu, UART/RS485/CAN, udhibiti wa PID, 0.7 s
OYMotion
Couldn't load pickup availability
Muhtasari
OYMotion ROH-AP001 Mkono wa Roboti ni Mkono wa Roboti wenye viungo 11 vinavyohamishika na madereva ya motor 6 yaliyojengwa ndani yanayotoa nyanja 6 za uhuru. Algorithm ya kudhibiti motor ya PID iliyojengwa ndani inaruhusu kushika na kudhibiti vitu kwa usahihi na kwa kurudiwa. Kila kidole kina sensor ya nguvu kwa ajili ya ufuatiliaji wa wakati halisi na kudhibiti mzunguko wa nguvu ya kushika. Mifumo ya kimwili ni pamoja na UART, RS485 au CAN FD, ikiwa na msaada wa itifaki maalum ya SerialCtrl, ModBus-RTU, na itifaki ya CAN. Majukwaa ya ROS/ROS2 yanasaidiwa kwa ajili ya maendeleo ya pili kupitia SDK (makubaliano ya leseni yanahitajika).
Vipengele Muhimu
- 6 DOF za kazi na viungo 11; vidole vinavyoweza kuendeshwa kwa uhuru kwa kushika kwa asili.
- Madereva ya motor yaliyojengwa ndani na udhibiti wa PID; uendeshaji wote umejumuishwa katika mkono.
- Sensor za nguvu kwenye kila kidole zikiwa na mrejesho wa kugusa na udhibiti wa nguvu kwa wakati halisi.
- Kuputika kwa kidole cha gumba pamoja na muundo wa kidole kinachoweza kukunjwa.
- Uendeshaji wa skrini ya kugusa unasaidiwa kwenye vidole vya mikono.
- Harakati za haraka: 0.7 s kubadilika/kutandaza kwa kiwango kamili na 0.7 s kuzunguka kwa kiwango kamili cha kidole cha gumba.
- Uwezo wa kubeba mzigo: hadi 30 Kg mzigo wa kupita kwa vidole vinne (vilivyopinda), 10 Kg kwa kidole (kilichopinda), 8 Kg kwa kidole (kilichotandazwa).
- Ukubwa na uwiano kama wa binadamu; vidole vya laini na glavu ya silicone; muundo wa kifundo cha mkono uliobinafsishwa; kengele ya ujumbe.
- Viunganishi na protokali: UART/RS485/CAN na SerialCtrl na ModBus-RTU; CAN kwa 1M baud.
- Vifaa vilivyothibitishwa: aloi ya alumini, aloi ya zinki, chuma cha pua, silicone, plastiki.
Maelezo
| DOF Inayotumika | 6 |
| Viungo vinavyohamishika (mifupa) | 11 |
| Umbali wa wima kutoka ncha ya kidole cha kati hadi kwenye wrist | 183 mm |
| Umbali wa wima kutoka ncha ya kidole gumba hadi kwenye wrist | 95 mm |
| Urefu wa kidole gumba | 111 mm |
| Upana wa juu wa kiganja | 82 mm |
| Kipenyo cha wrist | 49 mm |
| Angle ya juu ya kufungua na kufunga upande wa kidole gumba | 0~31 ° |
| Angle ya juu ya kufungua na kufunga kidole gumba hadi kiganja | 0~50 ° |
| Angle ya mzunguko wa pembeni wa kidole gumba | 0~90 ° |
| Muda wa kunyoosha/kukunjua kwa kiwango kamili kwa kasi ya juu zaidi | 0.7 sekunde |
| Wakati wa kuzungusha kidole gumba kwa kiwango kamili kwa kasi ya juu | 0.7 sekunde |
| Nguvu inayofanya kazi ya kila kidole kwenye hali ya kunyoosha | ≥0.5 Kgf |
| Nguvu inayofanya kazi ya kila kidole kwenye hali ya kukunja | ≥1.0 Kgf |
| Nguvu ya juu zaidi inayofanya kazi ya kidole gumba | ≥1.0 Kgf |
| Mzigo wa juu wa kupita kwa vidole vinne katika hali ya kukunjwa | 30 Kg |
| Mzigo wa juu wa kupita kwa kila kidole katika hali ya kukunjwa | 10 Kg |
| Mzigo wa juu wa kupita kwa kila kidole katika hali ya kunyoosha | 8 Kg |
| Funguo ya kugusa skrini | Inasaidiwa |
| Majibu ya nguvu ya kidole | Inasaidiwa |
| Joto la mazingira ya kazi | -10 °C ~ +40 °C |
| Unyevu wa mazingira ya kazi | Unyevu wa juu wa asilimia 85% |
| Huduma ya kubuni muda wa maisha | Miaka 3 |
| Uzito (ikiwemo kifundo) | 640 g ± 5 g |
| Kiunganishi cha Mawasiliano | UART/RS485/CAN |
| Baud Rate | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Protokali Zinazoungwa | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Vifaa | Alumini; aloi ya zinki; chuma cha pua; silikoni; plastiki |
Matumizi
- Vifaa vya mwisho vya roboti na roboti za kibinadamu.
- Vifaa vya elimu na utafiti.
- Prosthetics za bionic.
- Automatiki za viwanda na mifumo ya AGV.
Kwa msaada wa kuagiza, mwongozo wa uunganisho, au msaada wa kiufundi, tafadhali wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelekezo
Maelezo

ROHand inatoa usahihi wa upimaji wa ±1mm kupitia udhibiti wa motor wa PID uliojengwa na inatoa nyanja sita za uhuru wa kazi ili kuiga harakati za mikono ya binadamu kama vile kushika na kukamata. Inafaa kwa roboti za kibinadamu, vifaa vya mwisho vya roboti, mifumo ya ukaguzi, prosthetics za bionic za akili, na matumizi ya elimu au utafiti, muundo wake unasaidia usimamizi wa kubadilika na sahihi katika kazi ngumu.
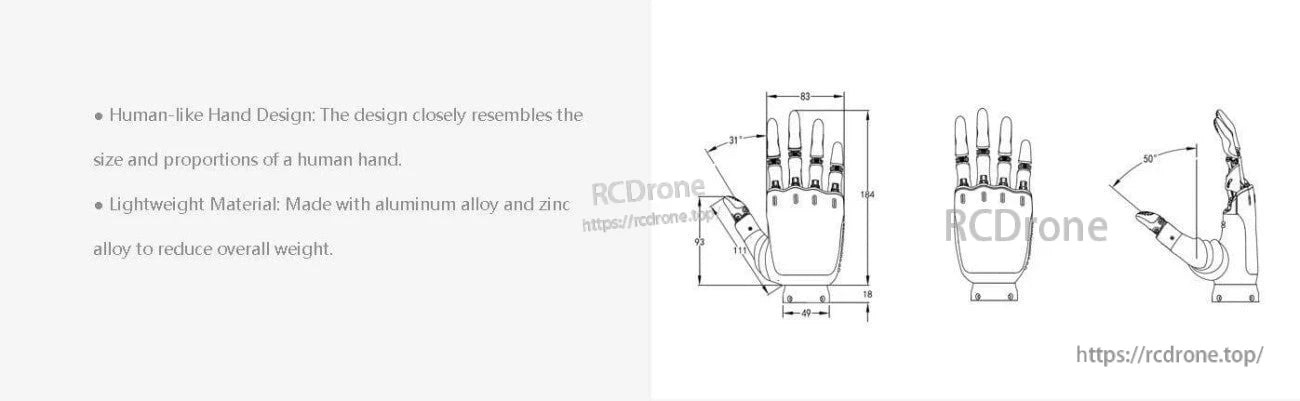
Mkono wa roboti wa kibinadamu wenye ujuzi na ujenzi wa aloi ya alumini na zinki yenye uzito mwepesi na vipimo sahihi.

OYMotion ROH-AP001 mkono wa roboti wenye ujuzi unafanana na uwiano wa binadamu, ukiwa na vidole vinavyohamishika na sensorer kwa ajili ya udhibiti sahihi wa roboti wa ukubwa halisi.
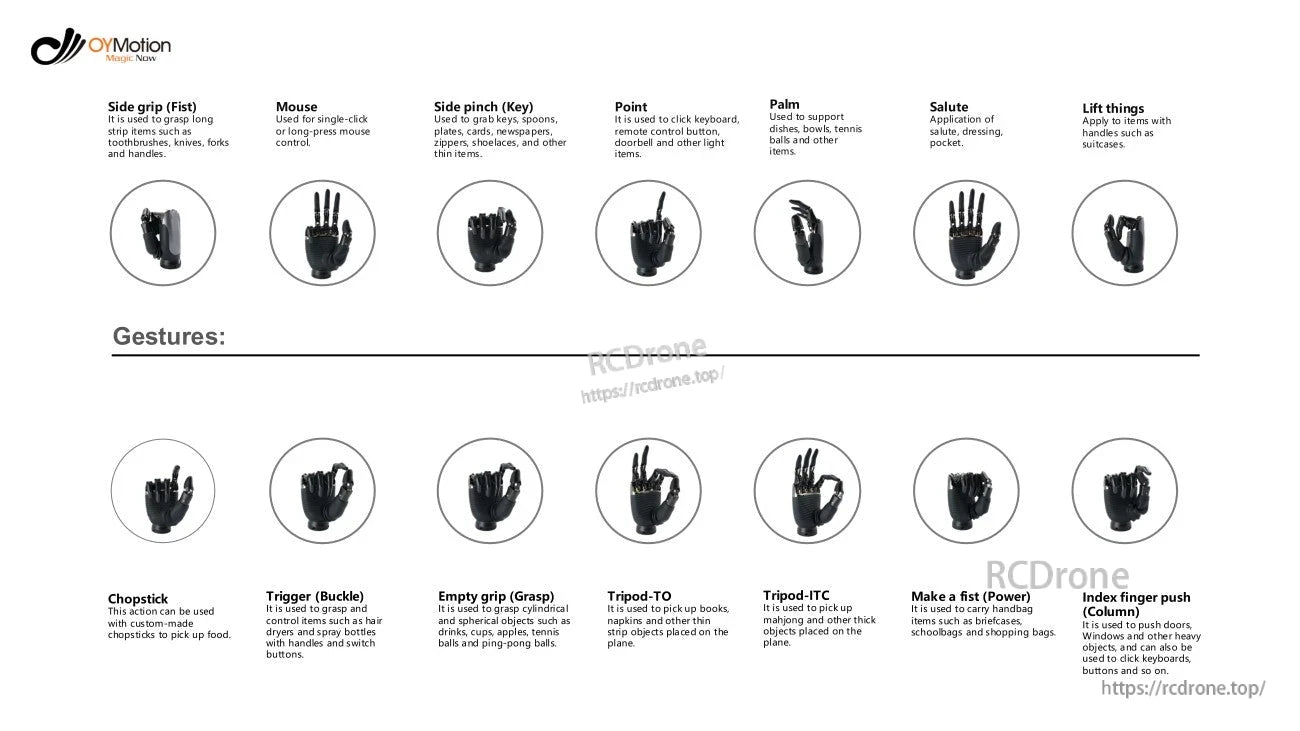
MKono wa roboti wa OYMotion unatekeleza ishara 14 sahihi—kama vile kushika, kuashiria, na kuinua—kushughulikia kazi za kila siku kama kutumia vijiko vya kuchoma, kubeba mifuko, au kubonyeza kibodi, ukionyesha ujuzi wa hali ya juu na matumizi ya vitendo.

MKono wa roboti wa OYMotion unatoa vidole vinavyotembea, muundo unaoweza kukunjwa, pad laini, kidole gumba chenye nguvu, glavu ya silikoni, uhamasishaji uliojengwa ndani, beeper, wrist maalum, na kiunganishi cha RS485 kwa ajili ya kushika kwa asili kwa ujuzi.
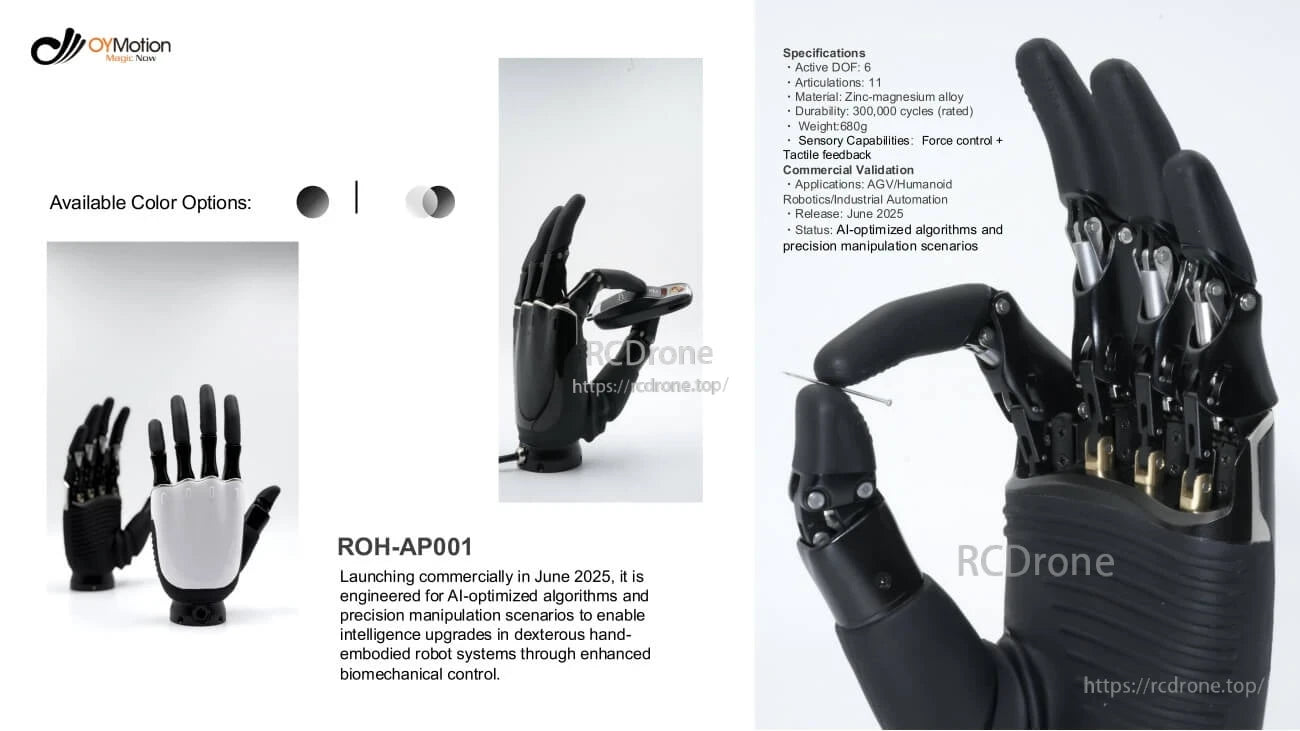
OYMotion ROH-AP001 mkono wa roboti wenye ujuzi una DOF 6 za kazi, viungio 11, ujenzi wa aloi ya zinki-magnesium, kuegemea kwa mizunguko 300k, uzito wa 680g, na unatoa mrejesho wa nguvu/kuhisi kwa ajili ya AI na kazi za usahihi—kuanzishwa Juni 2025.

Kidole cha roboti cha OYMotion ROH-AP001 kina vidole vya motor, kidole gumba chenye nguvu, glavu ya silicone, na uendeshaji uliojengwa ndani. Imetengenezwa kwa alumini, zinki, chuma, silicone, na plastiki, inajumuisha beeper, wrist maalum, itifaki ya RS485, muundo wa kukunjwa, na spring za shinikizo.
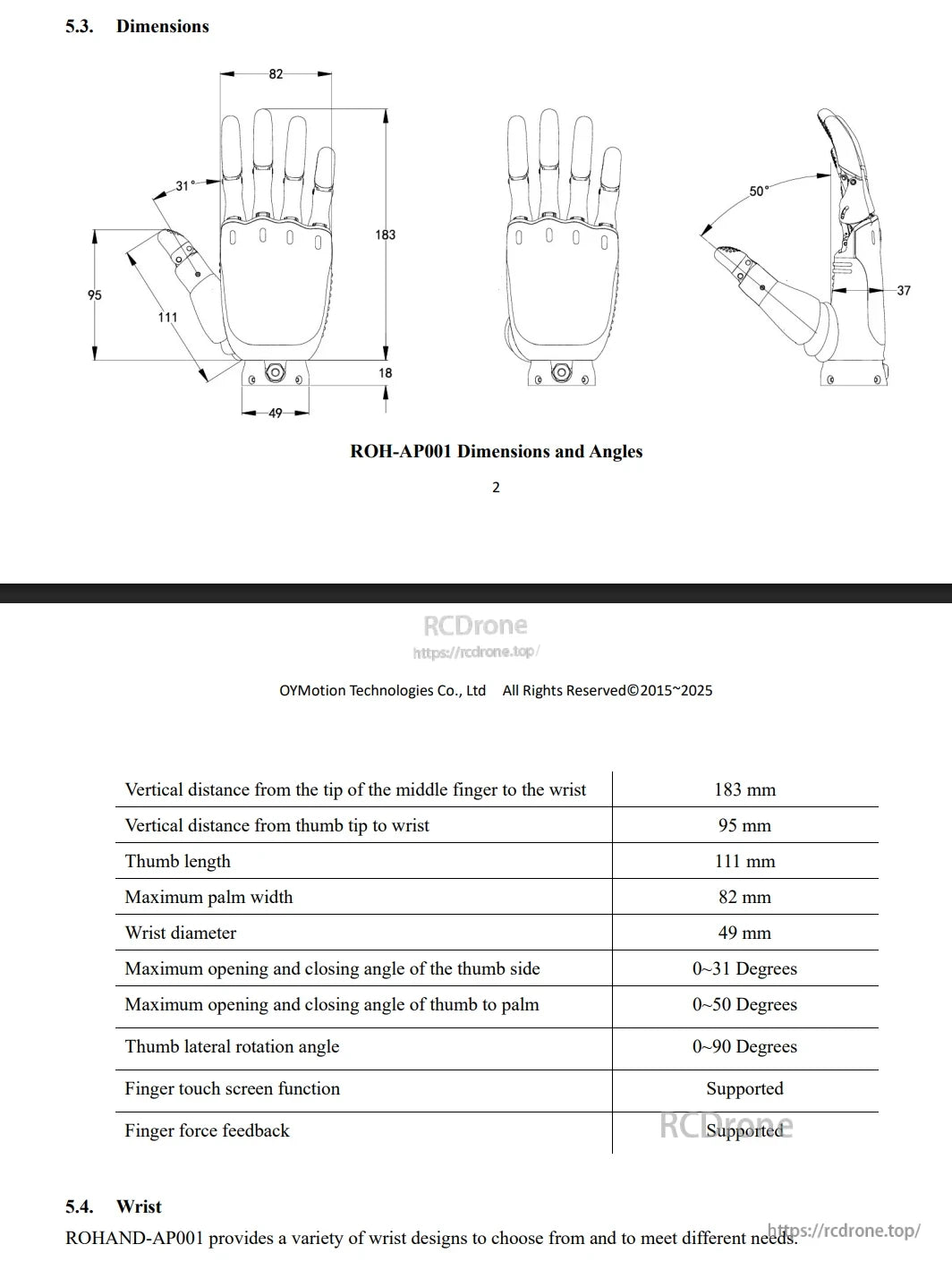
Vipimo vya kidole cha roboti ROH-AP001 vinajumuisha urefu wa 183mm kutoka kidole hadi wrist, 95mm kutoka kidole gumba hadi wrist, urefu wa kidole gumba wa 111mm, upana wa kiganja wa 82mm, na kipenyo cha wrist cha 49mm. Mwelekeo wa kidole gumba: 0-31° upande, 0-50° kuelekea kiganja, 0-90° mzunguko. Inasaidia skrini ya kugusa na mrejesho wa nguvu.
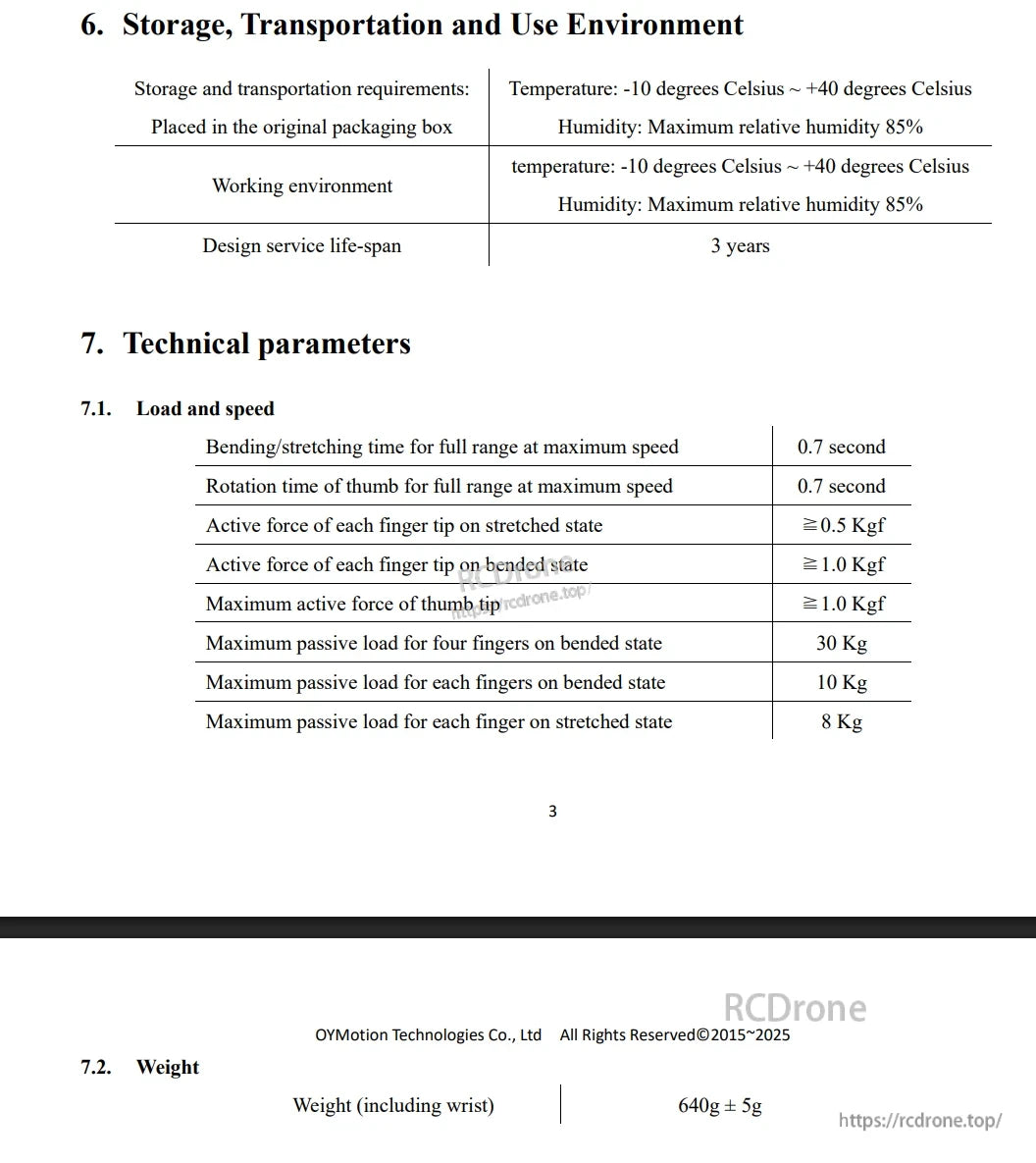
Kidole cha roboti cha OYMotion ROH-AP001 kinatumika kati ya -10°C hadi +40°C, unyevu wa juu wa 85%. Muda wa kubuni: miaka 3. Uzito: 640g ±5g. Nguvu ya kidole inayofanya kazi ≥0.5–1.0 Kgf; mzigo wa passiv hadi 30kg kwa vidole vinne.
Related Collections





