







PIXHAWK2.4.8 Kidhibiti cha Ndege cha Carbon Fiber 450 Frame Kit - Ardupilot 100MW Radio Telemetry Quadcopter BLHELI 20A 2212 Motor ESC
PIXHAWK2.4.8 Kidhibiti cha Ndege cha Carbon Fiber 450 Frame Kit - Ardupilot 100MW Radio Telemetry Quadcopter BLHELI 20A 2212 Motor ESC
RCDrone
Couldn't load pickup availability
PIXHAWK2.4.8 Udhibiti wa Ndege Carbon Fiber 450 MAELEZO YA Kifurushi cha Fremu
Tumia: Magari na Vifaa vya Kuchezea vya Udhibiti wa Mbali
Kupendekeza Umri: 12+y,14+y,6-12y
Asili: Uchina Bara
Nyenzo: Carbon Fiber
Jina la Biashara: rctosky
Pixhawk 2.4.8 inaweza kutumia programu dhibiti ya hivi punde rasmi ya ardupilot na programu dhibiti ya PX4.
1. Vichakataji vya hali ya juu vya 32-bit ARM CortexM4(2MB flash), vinaweza kuendesha mfumo wa uendeshaji wa wakati halisi wa NuttX RTOS;
2. 14 PWM / pato la servo;
3. Kiolesura cha basi (UART, I2C, SPI, CAN);
4. Nguvu ya chelezo iliyojumuishwa na kidhibiti chelezo kinashindwa, kidhibiti cha msingi kinashindwa kudhibiti kidhibiti kiko salama;
5. Toa hali za kiotomatiki na za mwongozo;
6. Toa pembejeo ya nguvu isiyohitajika na kushindwa;
7. Taa za LED za rangi nyingi;
8. Toa Kiolesura cha sauti nyingi cha buzzer
9. Data ya ndege ya kurekodi Micro SD;
Maelezo:
Kiolesura
1 .5 volteji ya juu inayooana UART 1, 2 yenye udhibiti wa mtiririko wa maunzi
2. 2 INAWEZA
3.Spektrum DSM / DSM2 / DSM-X ingizo patanifu la kipokezi cha setilaiti
4.Futaba SBUS pembejeo na matokeo patanifu
5.PPM Uingizaji wa Mawimbi
6.RSSI (PWM au voltage) Ingizo
7.I2C
8.SPI
9.3.3 na 6.6VADC ingizo
10. Kiolesura cha Nje cha MICRO USB
Ugawaji Rahisi:
F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 920KV motor
Kifurushi Rahisi:
F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 920KV motor
Kifurushi Kawaida:
F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 920KV motor<1>t14045>
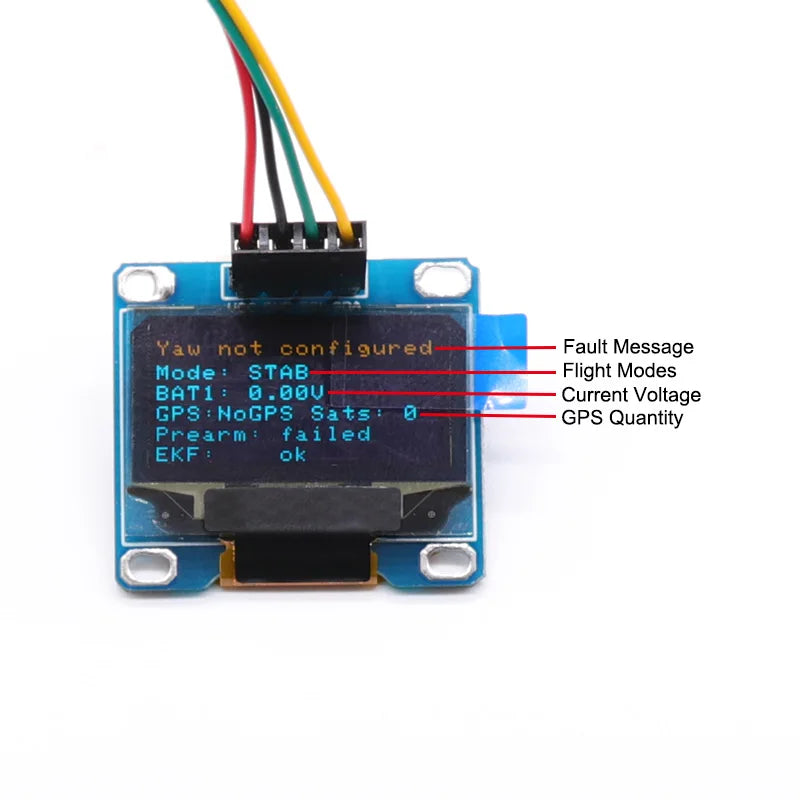
PIXHAWK 2.4.8(gamba jeupe au jeusi)+ 4G TF Kadi + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Bodi+ 3 Line(4Pin 1.25 ,6Pin 1.25 ,5.4) Kifurushi cha Juu: F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 920KV motor<0>t16234> PIXHAWK 2.4.8(gamba jeupe au jeusi)+ 4G TF Kadi + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Bodi ya Upanuzi+ RGB Led + OLED Screen+ Line 3(4Pin 62, 4Pin 1. 1.25 ,3Pin 2.5.4) 433MHZ 100MW A : F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 PIXHAWK 2.4.8+ 4G TF Card + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Board+ Laini 3(4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4) + M8N GPS+ GPS Holder+ 3DR Power Module+ Shock Absorber+1metry70MH Redio ya Mshtuko+1metry0MH T19377>
433MHZ 500MW B: F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 PIXHAWK 2.4.8(gamba jeupe au jeusi)+ 4G TF Card + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Board+ RGB LED + OLED Screen+ 3 Line(4Pin 1.25 ,6Pin 1.22 .54. ) + M8N GPS+ GPS Holder+ 3DR Power Moduli+Shock Absorber+433MHZ 500MW Radio telemetry 433MHZ 1000MW C: 2>motor PIXHAWK 2.4.8(ganda jeupe au jeusi)+ 4G TF Card + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Board+ RGB LED + OLED Screen+ 3 Line(4Pin 1.25 ,6Pin 1.25 ,54. ) + M8N GPS+ GPS Holder+ 3DR Power Moduli+Shock Absorber+433MHZ 1000MW Radio telemetry 915MHZ 100MW A:F450+4 PCS BLHELI 30A +4 5 pairs 28 228 294>> t25303> 920KV motor PIXHAWK 2.4.8+ 4G TF Kadi + Kitufe cha Usalama + Buzzer + PPM Kisimba + I2C Bodi ya Upanuzi+ Laini 3(4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4) + M8+N Module+3 GPS Hock Power Absorp +915MHZ 100MW Telemetry ya Redio 915MHZ 500MW B: F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212 PIXHAWK 2.4.8(gamba jeupe au jeusi)+ 4G TF Card + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Board+ RGB LED + OLED Screen+ 3 Line(4Pin 1.25 ,6Pin 1.25 ,54. ) + M8N GPS+ GPS Holder+ 3DR Power Moduli+Shock Absorber+915MHZ 500MW Radio telemetry 433MHZ 1000MW : F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212
PIXHAWK 2.4.8(gamba jeupe au jeusi)+ 4G TF Card + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Board+ RGB LED + OLED Screen+ 3 Line(4Pin 1.25 ,6Pin 1.22 ,54. ) + M8N GPS+ GPS Holder+ 3DR Power Moduli+Shock Absorber+433MHZ V5 1000MW Redio telemetry
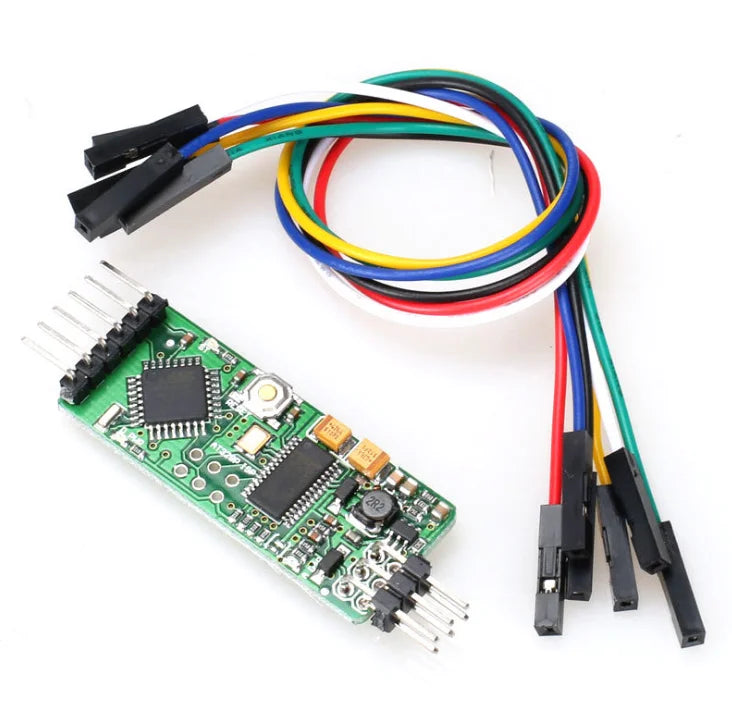
433MHZV5 1000MW OSD:
F450+4 PCS BLHELI 30A +4 jozi 1045 Propellers +4 PCS 2212
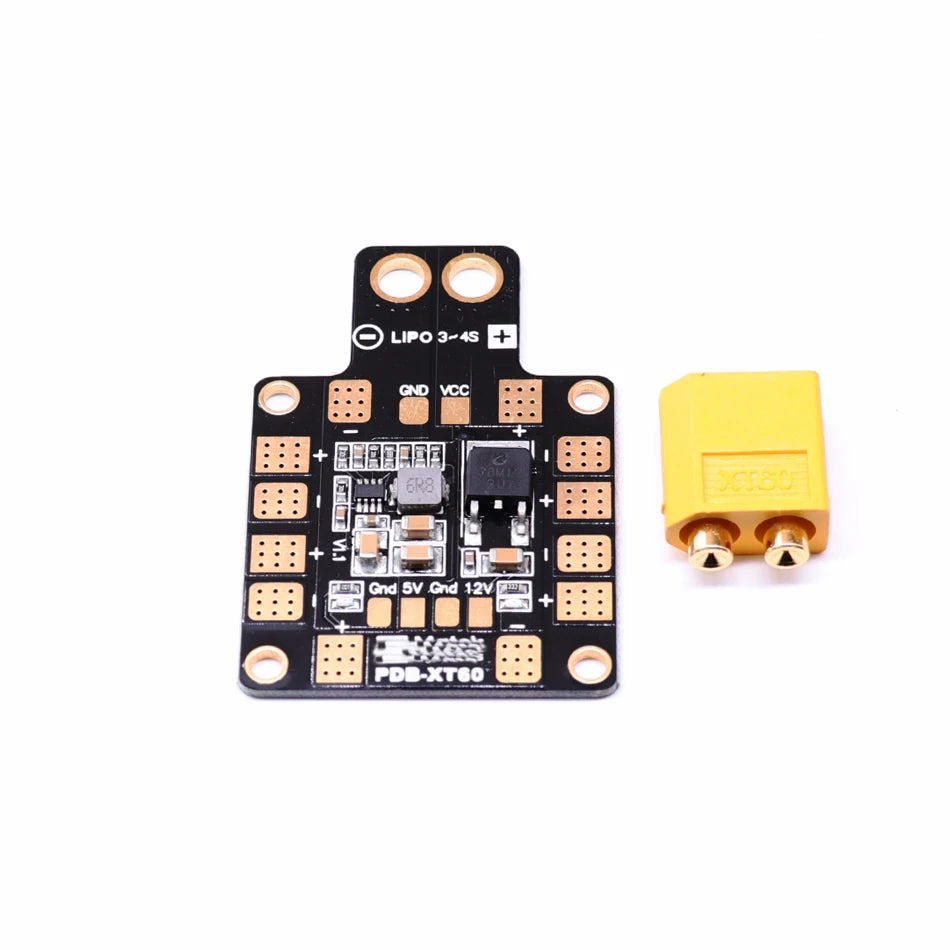
PIXHAWK 2.4.8(gamba jeupe au jeusi)+ 4G TF Card + Kitufe cha Usalama + Buzzer + PPM Encoder + I2C Upanuzi Board+ RGB LED + OLED Screen+ 3 Line(4Pin 1.25 ,6Pin 1.22 ,5Pin 3.4) + M8N GPS+ GPS Holder+ 3DR Power Module+Shock Absorber+433MHZ V5 1000MW Radio telemetry+MINI OSD +PDB
Kifurushi cha TOP:
F450+4 PCS BLHELI 30A +4 jozi skujifungia elf27><2529>



A.Vipengele
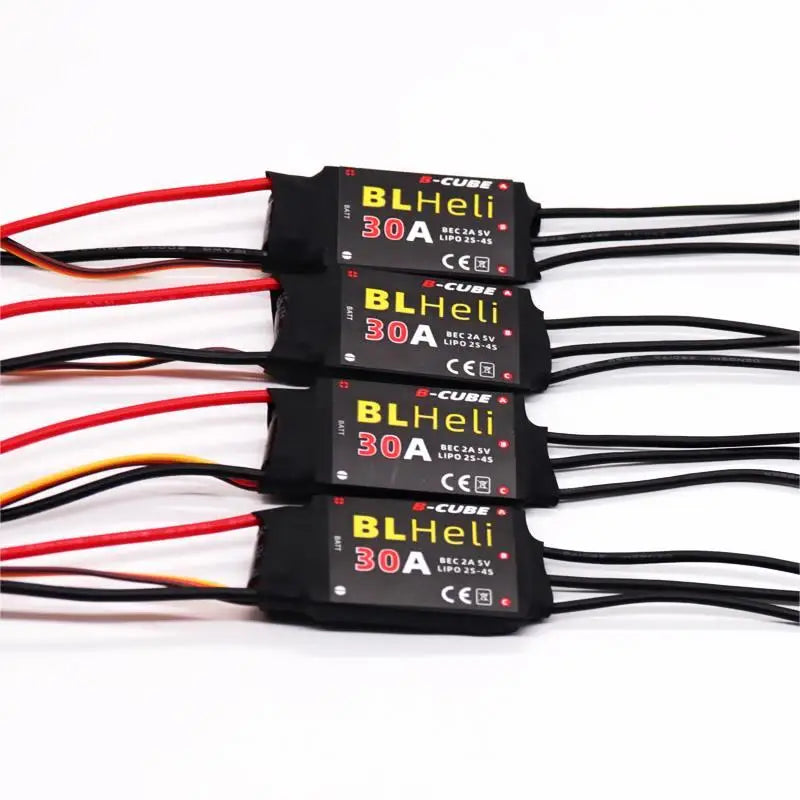
A1: Tumia vipengee halisi vya kielektroniki ili kuhakikisha ubora wa juu na kuimarisha uwezo wa sasa wa ustahimilivu wa ESC.
A2: Kulingana na programu dhibiti ya BLHeli, iliyoboreshwa kwa ajili ya utendakazi wa hali ya juu na ulinganifu mzuri na majibu ya haraka zaidi.
A3: Maalum iliyoundwa kwa ajili ya mashine nyingi, na inaoana na ndege za mrengo zisizobadilika na helikopta.
A4: Vipengele vingi vya ulinzi ikiwa ni pamoja na ulinzi wa kukata voltage ya Chini / ulinzi wa joto kupita kiasi / ulinzi wa kupoteza kwa mawimbi.
A5: Masafa ya throttle yanaweza kusanidiwa na yanaoana kikamilifu na vipokezi vyote, ikitoa majibu laini, ya mstari na sahihi. A6: Vigezo vyote vinaweza kupangwa kupitia kisambaza data, ikijumuisha mipangilio chaguomsingi.
B. Maalum ya bidhaa

1045 Propellers

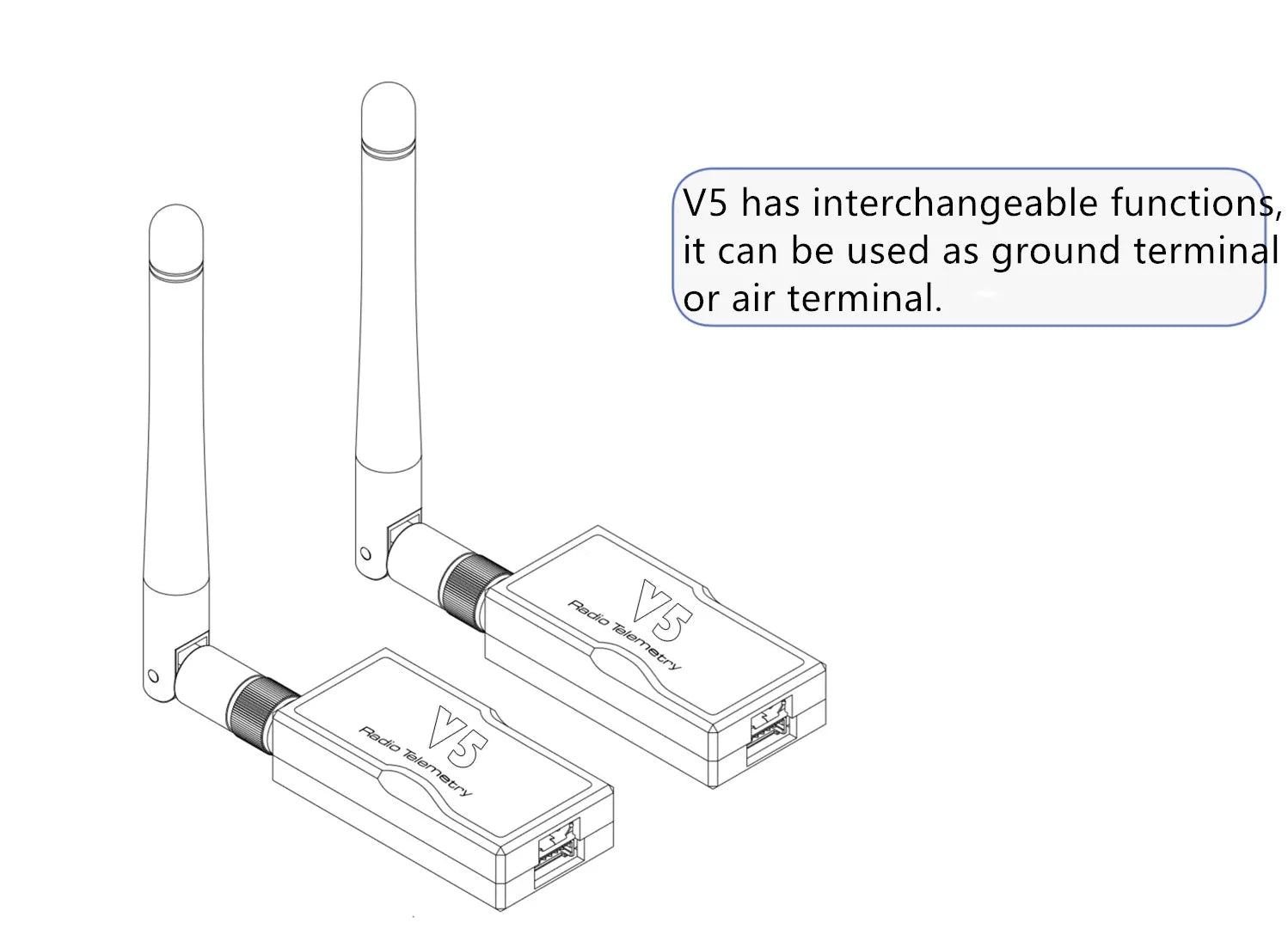
Moduli ya V5 ina utendakazi unaoweza kubadilishwa, na kuiruhusu kutumika kama kituo cha ardhini au kituo cha angani.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_286b8762-ba49-44db-a8cd-b38c172bd03c.webp?v=1714895788)


VTX5848 ni kisambaza data cha video,inaauni chaneli 25MW-600MW,48 (iliyo na sink ya joto abd 3DBantena ) Kamera ya FPV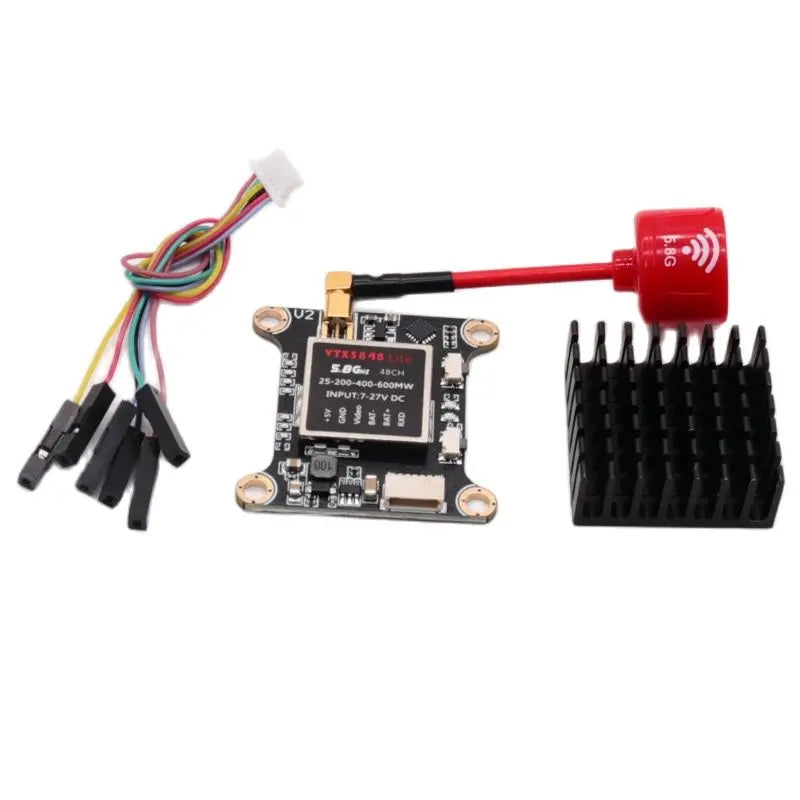

Makala haya yanafafanua jinsi ya kuunganisha ESC, injini na propela kwa otomatiki.Pixhawk inatumika kama mfano lakini majaribio mengine ya kiotomatiki yameunganishwa kwa njia sawa.
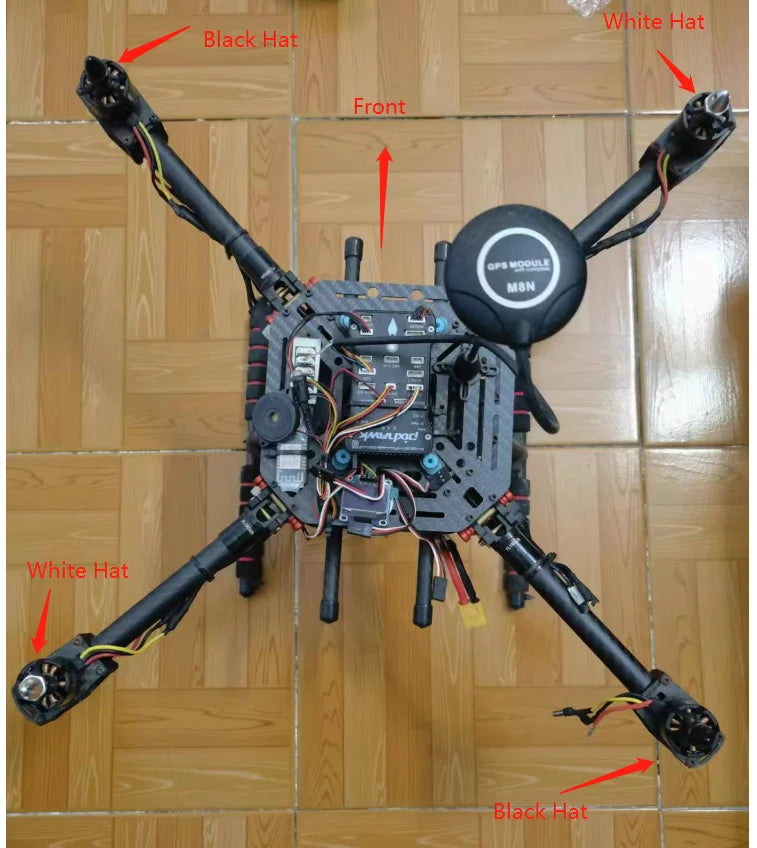
Unganisha nyaya za nishati (+), ardhi (-), na ishara (s) kwa kila ESC kwenye pini kuu za kutoa kifaa kiotomatiki kwa nambari ya gari. Tafuta aina ya fremu yako hapa chini ili kubaini mpangilio uliokabidhiwa wa injini.

Pixhawk Outputpins (zina nambari). Pini 4 za kwanza zimewekewa msimbo wa rangi ili kuunganisha Quadframe
Michoro ya agizo la gari
Michoro iliyo hapa chini inaonyesha mpangilio wa gari kwa kila aina ya fremu. Nambari zinaonyesha ni pini ipi ya pato kutoka kwa otomatiki inapaswa kuunganishwa kwa kila motor/propela. Mwelekeo wa propela unaonyeshwa kwa rangi ya kijani (saa, CW) au bluu (kinyume cha saa, CCW)

Hadithi ya michoro ya kuagiza magari
Quadcopter

Kutambua vichochezi vya mwendo wa saa na kinyume cha saa

Michoro iliyo hapo juu inaonyesha aina mbili za propela: mwendo wa saa (ziitwazo visukuma) na kinyume cha saa (zinazoitwa vivutaji). Inaaminika zaidi kutambua aina sahihi ya propela kwa umbo lake kama inavyoonyeshwa hapa chini. Ukingo mzito ni ukingo wa mbele ambao husogea kuelekea kuzunguka. Ukingo unaofuata una mikunjo mikali zaidi na kwa kawaida ni nyembamba.
Jinsi ya kusakinisha Motor?
Related Collections






















