




ROBOTERA XHAND 1 Mkono wa Roboti - 12 DoF, vidole vya mguso 270°, nguvu ya kushika 80N, uwezo wa kuinua 25 Kg, EtherCAT/RS485, tayari kwa ROS
ROBOTERA XHAND 1 Mkono wa Roboti - 12 DoF, vidole vya mguso 270°, nguvu ya kushika 80N, uwezo wa kuinua 25 Kg, EtherCAT/RS485, tayari kwa ROS
ROBOTERA
Couldn't load pickup availability
Muhtasari
ROBOTERA XHAND 1 ni Mkono wa Roboti wenye vidole vitano na moduli za pamoja za kuendesha moja kwa moja na DoF 12 zinazofanya kazi. Mkono huu una ukubwa wa mkono wa binadamu (191 mm x 94 mm x 47 mm) na umeundwa kwa ajili ya usimamizi wa ustadi wenye hisia za kugusa za kiwango cha juu, nguvu thabiti ya kushika, na interfaces rafiki kwa waendelezaji kwa ajili ya utafiti wa roboti na uunganishaji.
Vipengele Muhimu
- Muundo wa kuendesha moja kwa moja wenye moduli za pamoja zinazodhibitiwa kwa nguvu na gia zilizojumuishwa (3 kwenye kidole gumba; 9 kwenye vidole vingine vinne).
- DoF 12 zinazofanya kazi kikamilifu; mzunguko wa kidole cha index wa +/-15° kwa usimamizi mgumu ndani ya mkono.
- Utendaji mzuri wa kushika: nguvu ya kidole 15N; nguvu ya kushika ya juu 80N; uzito wa juu wa kushika hadi 25 Kg (palm juu) na 16 Kg (palm kushoto).
- Uendeshaji wa kasi ya juu unaounga mkono >2Hz kurudiwa kufungua/kufunga; umeonyesha kubonyeza vidole hadi 10 CPS (Bonyeza Kila Sekunde).
- 270° kugusa kwa vidole na sensa tano za muundo wa tatu; azimio la mkono mzima 12x10 kwa kila kidole x 5.
- Uchunguzi wa nguvu wa muundo wa tatu ikiwa ni pamoja na nguvu za pembeni (X na Y); usahihi wa kurudiwa kwa nafasi ya kidole +/-0.20 mm.
- Inayoweza kuendesha nyuma na damping <= 0.1 Nm; udhibiti wa nguvu wa mzunguko wa sasa na udhibiti wa nguvu-na-nafasi kwa mwingiliano wa kufaa.
- Muunganisho rafiki kwa wabunifu: EtherCAT na RS485 (USB); inafaa na ROS1/ROS2, Ubuntu (Linux), x86 na ARM architectures, TwinCAT, na mikono ya roboti ya kawaida (ikiwemo xARM, Realman, UR).
- Ustahimilivu umewekwa kwa mizunguko 1,000,000 bila mzigo; joto la kufanya kazi -20°C ~ 60°C.
Kwa maswali, msaada wa uunganisho, au ununuzi wa wingi, wasiliana [email protected] or tembelea https://rcdrone.top/.
Maelezo
| Kigezo | Thamani |
|---|---|
| Uzito | 1100 g |
| Vipimo (L x W x T) | 191 mm x 94 mm x 47 mm (Ukubwa wa mkono wa mtu mzima) |
| DoF Inayoendelea (Jumla) | 12 |
| DoF Isiyoendelea (Jumla) | 0 |
| Ugawaji wa DoF | Kidole Gumba x 3; Kidole cha Kwanza x 3; Kidole cha Kati x 2; Kidole cha Ring x 2; Kidole Kidogo x 2 |
| Uendeshaji/Usafirishaji wa Kidole Gumba | Moduli ya pamoja inayodhibitiwa kwa nguvu ya gia 3 |
| Uendeshaji/Usafirishaji wa Vidole Vinne | Moduli ya pamoja inayodhibitiwa kwa nguvu ya gia 9 |
| Mpangilio wa Vidole vya Kidole | Vidole vya Kidole vya Mduara au Vilivyopindika |
| Swing ya Pembeni | -15°~+15° (Kidole cha Kwanza) |
| Usahihi wa Nafasi ya Kurudia ya Kidole | +/− 0.20 mm |
| Modes ya Udhibiti | Udhibiti wa nafasi (kudhibiti chini/kudhibiti juu), udhibiti wa nguvu wa mzunguko wa sasa, udhibiti wa nguvu-na-nafasi |
| Nguvu ya Kidole cha Mkono | 15N |
| Nguvu ya Kushika Kiwango Kikubwa (mkono mzima) | 80N |
| Uzito wa Kushika Kiwango Kikubwa (kikombe cha kushoto) | 16 Kg |
| Uzito wa Kushika Kiwango Kikubwa (kikombe juu) | 25 Kg |
| Kidole Kichwa Kimoja Kimoja | Kidole Kidogo |
| Speed ya Kurudia Kufungua/Kufunga | >2Hz |
| Kudhibiti Damping ya Nyuma (Inayoweza Kudhibitiwa Nyuma) | <= 0.1 Nm |
| Kufunika kwa Kugusa | 270° kuzunguka vidole vitano vya kugusa |
| Idadi ya Vihisi vya Kugusa | Vihisi vitano vya kuzunguka kwa 270° vya kugusa kwenye vidole vitano |
| Ufafanuzi wa Kugusa (mkono mzima) | 12x10 (kuzunguka kwa 270° kwa kila kidole) x 5 |
| Vipimo vya Kugundua Kugusa | Kugundua nguvu za tatu (ikiwemo nguvu za pembeni X na Y) |
| Masafa ya Udhibiti wa Mkono Mzima | 83Hz |
| Kiwango cha Mawasiliano | EtherCAT: 100MHz; RS485: 3MHz |
| Vigezo vya Kugundua | Vidole: nguvu 120 za profiling za tatu; Viungo: nafasi, kasi, joto, sasa (torque) |
| Vigezo vya Udhibiti | Msimamo wa pamoja; torque ya pamoja; kipimo cha ugumu wa pamoja; kipimo cha damping ya pamoja |
| Zamu za Kushika Bila Mizigo | 1,000,000 zamu |
| Kiwango cha Joto la Uendeshaji | -20°C ~ 60°C |
| Voltage ya Kazi | 24V ~ 72V |
| Umeme wa Kawaida | 0.15A @48V, 7W |
| Maximun Umeme | 2.5A @48V, 120W |
| Kiunganishi cha Mawasiliano | RS485 (USB), EtherCAT |
Maombi
- Teleoperation: inasaidia MR na teleoperation ya glovu; Vision Pro teleoperation; Manus Gloves; Pico/Meta Quest.
- Ushirikiano wa mkono wa roboti na binadamu: inafaa na xARM, Realman, UR, na mikono mingine ya roboti.
- Utafiti na simulation: URDF sahihi, simulation ya kugusa; inafaa kwa kujifunza kwa nguvu na Isaac Gym na Mujoco.
- Maingiliano ya binadamu-na-mashine na uendeshaji wa zana za kibinadamu kwa kudhibiti nguvu inayofaa.
Miongozo
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Maelezo

ROBOTERA XHAND1 mkono wa roboti wenye mfumo wa moja kwa moja, ukitoa uhuru wa kweli na ustadi wa hali ya juu.

XHAND1 na ROBOTERA: mkono wa binadamu wenye vidole vitano na nyuzi 12 za uhuru, sensorer za kugusa 270° kwa kila kidole, nguvu ya kushikilia 80N, uwezo wa kubeba uzito wa 25kg. Imeundwa kwa ajili ya kazi ngumu na kushughulikia zana.

XHAND 1: Mkono wa kwanza wenye ustadi na moduli za kuendesha moja kwa moja kwa kila kiunganishi. Ina injini zisizo na waya zenye nguvu kubwa, wapunguzaji wa mshtuko wa chini, encoders za usahihi, na moduli za kiunganishi zilizojitengeneza kwa ajili ya udhibiti wa roboti wa hali ya juu.
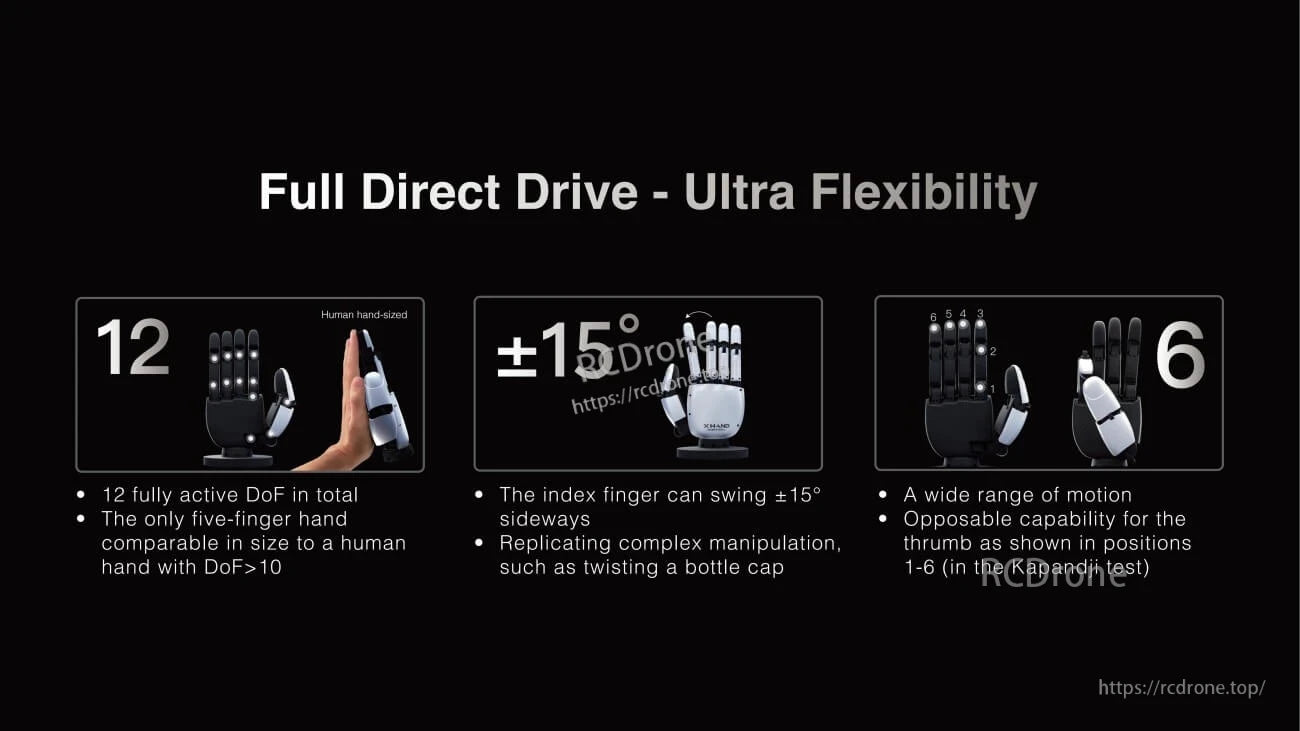
ROBOTERA XHAND 1 ni mkono wa roboti wenye unyumbufu wa hali ya juu, wa ukubwa wa binadamu wenye nyuzi 12 za DoF. Kidole chake cha kwanza kinapiga ±15° kando kwa kazi ngumu, na kidole gumba kinatoa nafasi sita zinazoweza kupingana kwa ajili ya udhibiti wa aina mbalimbali.

ROBOTERA XHAND 1: uzito wa 25kg, nguvu ya kushikilia 80N, kuendesha moja kwa moja kamili, inazidi suluhisho zinazofanana za kiungo/kamba.

Roboti ya mkono yenye Kuendesha Moja kwa Moja inapata 10 CPS kwa kasi inayotolewa na gia, torque zaidi ya 1 Nm, ikipita mifumo ya kiungo na kamba kwa utendaji bora wa michezo.

ROBOTERA XHAND 1 ina sensorer za vidole za 270° zenye >100 pointi na usahihi wa 0.05 N kwa nguvu ya 3D, kugusa, na upimaji wa joto, kuhakikisha utendaji bora wa kushikilia.
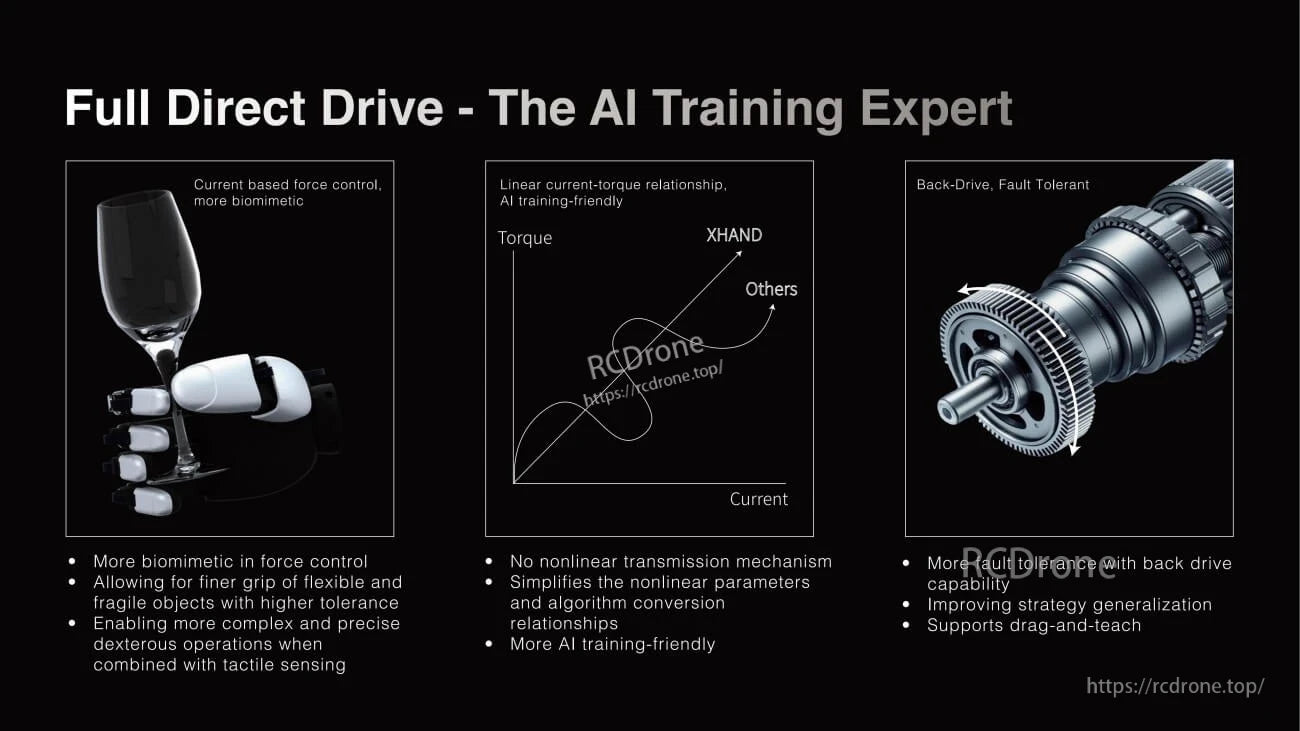
ROBOTERA XHAND 1 inatoa udhibiti wa nguvu wa biomimetic, majibu ya torque-current ya moja kwa moja kwa mafunzo ya AI, na uvumilivu wa kosa la nyuma—ikiwezesha kushughulikia kwa usahihi, algorithimu zilizorahisishwa, msaada wa drag-and-teach, na uboreshaji wa jumla wa mikakati.
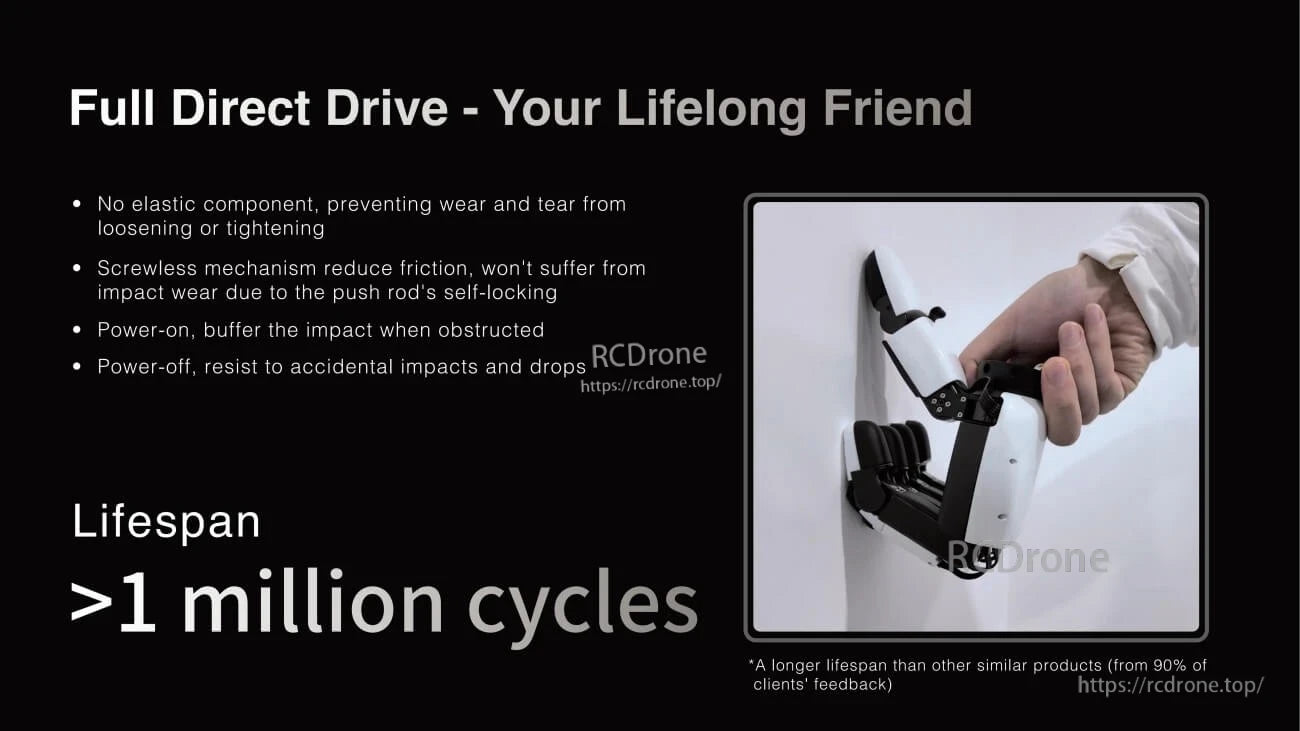
Roboti ya mkono wa Drive Direct kamili inatoa uimara bila sehemu za elastic au viscrew, inatoa kinga ya athari wakati imewashwa, upinzani wa kuanguka wakati imezimwa, na muda wa maisha unaozidi mizunguko milioni moja—ikiwazidi bidhaa zinazofanana kulingana na maoni ya wateja.

ROBOTERA XHAND 1 inasaidia teleoperation ya MR na glovu, inafaa na ROS1/ROS2 na Ubuntu kwenye x64/ARM. Ina vipengele vya EtherCAT/TwinCAT/RS485 kwa ajili ya kuunganishwa na xARM, Realman, mikono ya roboti ya UR. Inatoa uundaji sahihi wa URDF na simulation ya kugusa. Imeundwa kwa ajili ya matumizi ya roboti rafiki kwa waendelezaji yenye kubadilika kati ya majukwaa na itifaki za kudhibiti za kisasa.
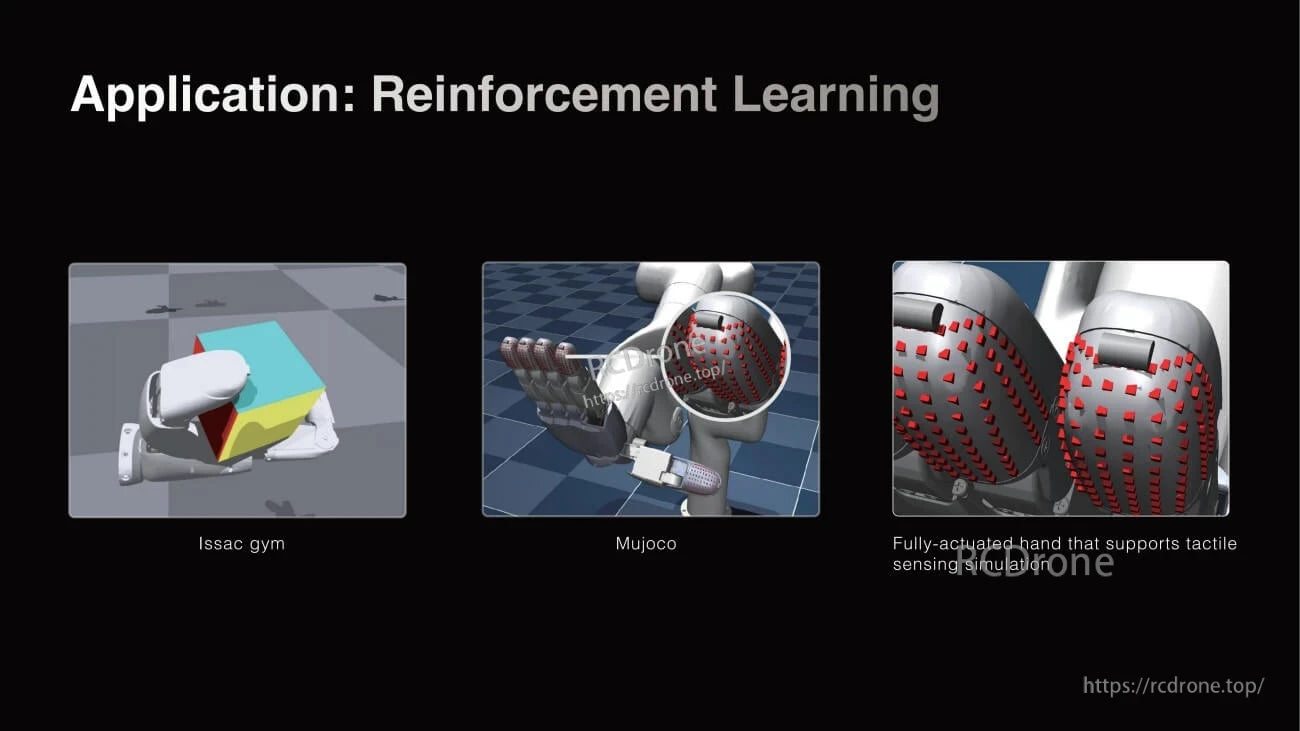
Maombi ya kujifunza kwa nguvu: Issac gym, Mujoco, na mkono unaofanya kazi kikamilifu na simulation ya kugusa kwa ajili ya kudhibiti roboti za juu na mazingira ya mafunzo.
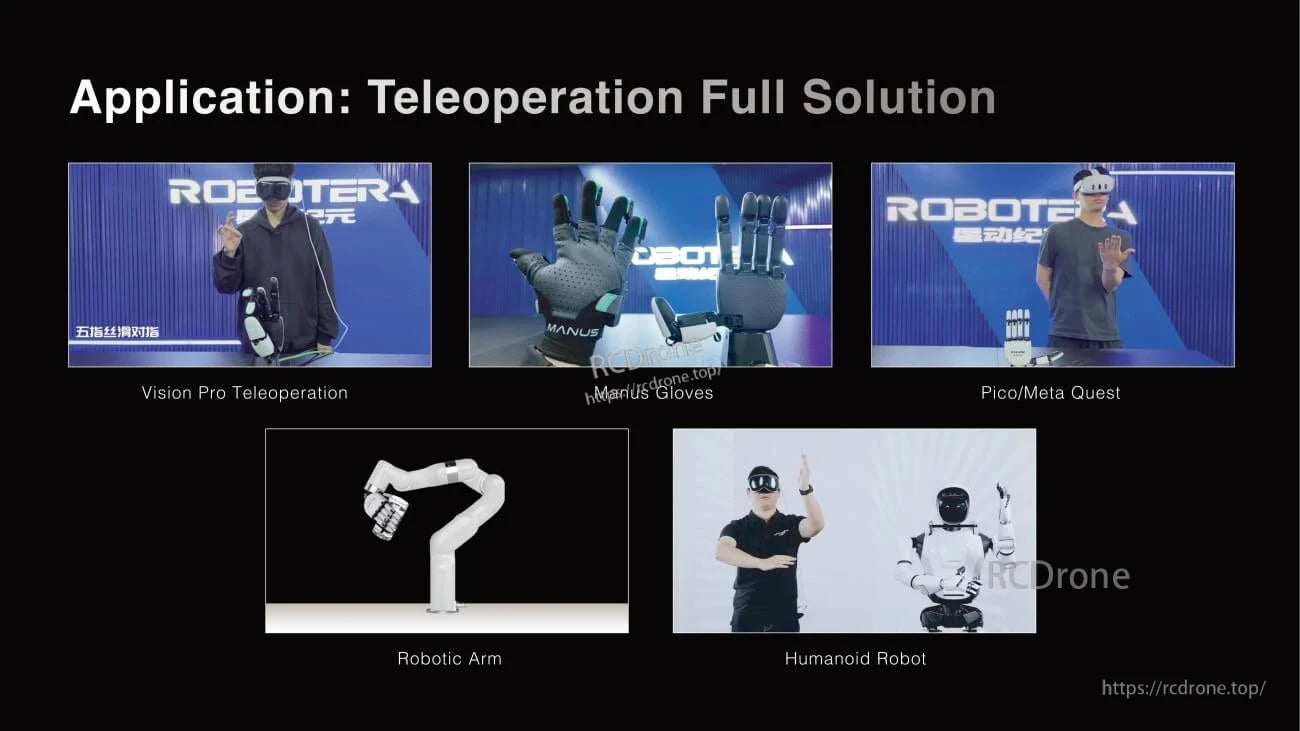
Suluhisho kamili la teleoperesheni likijumuisha Vision Pro, Manus Gloves, Pico/Meta Quest, mkono wa roboti, na roboti wa kibinadamu kwa udhibiti wa mbali wa hali ya juu.
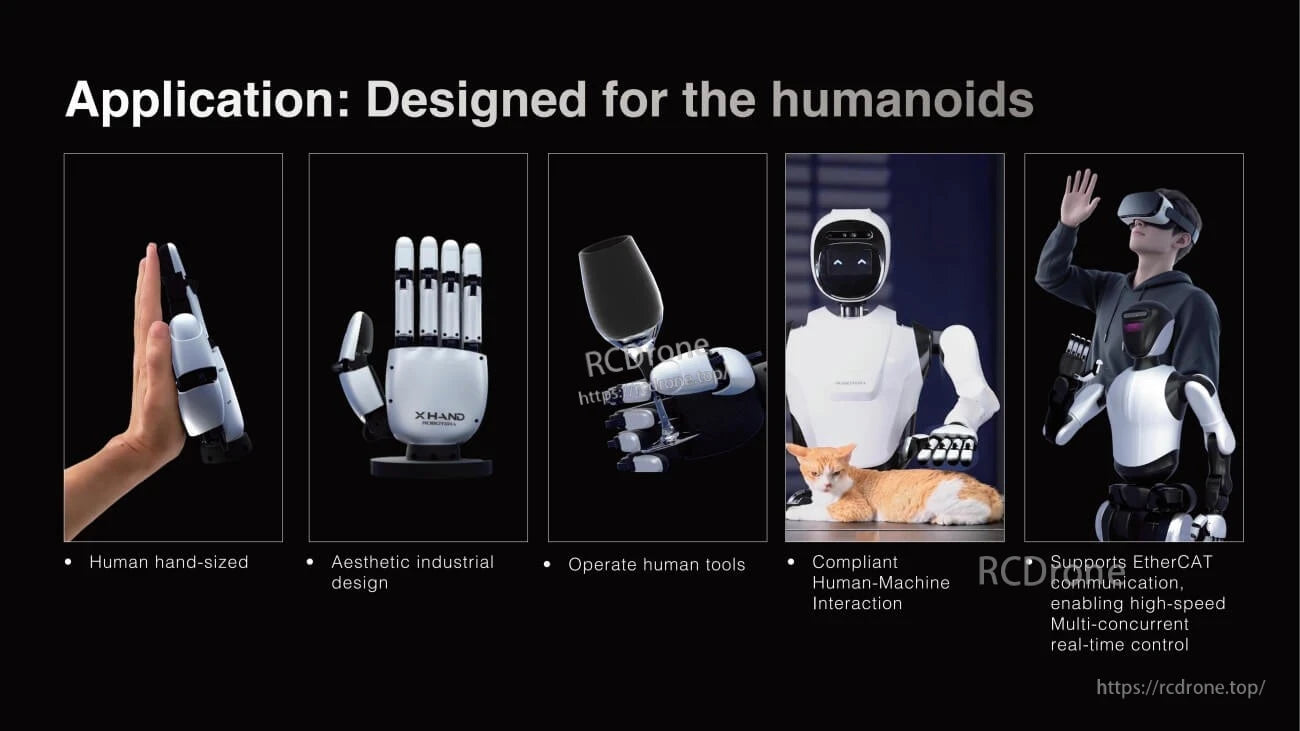
Kidole cha roboti chenye ukubwa wa binadamu chenye muundo wa kuvutia, kinatumia zana, kinakuza mwingiliano unaokubalika, kinasaidia EtherCAT kwa udhibiti wa wakati halisi.
Related Collections




