



S2-F290 Drone Inayoweza Kupangwa - Pixwawk Chanzo Huria cha ROS SLAM AI Kiwango cha Maendeleo ya Sekondari ya Viwanda kwa Changamoto ya Drone
S2-F290 Drone Inayoweza Kupangwa - Pixwawk Chanzo Huria cha ROS SLAM AI Kiwango cha Maendeleo ya Sekondari ya Viwanda kwa Changamoto ya Drone
RCDrone
Couldn't load pickup availability
Muhtasari
The Drone ya S2-F290 Inayoweza Kupangwa ni utendaji wa juu drone ya kiwango cha viwanda iliyoundwa kwa ajili ya maendeleo ya pili na changamoto za drone. Akimshirikisha a uwezo wa kupakia 2400g, a Betri ya 6S 6000mAh, na a umbali wa juu wa udhibiti wa 10KM, inatoa usahihi na Usahihi wa kuweka GPS wa ≈1–2m na upinzani wa upepo wa Kiwango cha 3-4. Inaendeshwa na Kidhibiti cha ndege cha Pixhawk 2.4.8 na teknolojia ya wazi ya ROS SLAM, drone inasaidia utendaji wa juu kama vile Uwekaji ramani wa 3D LiDAR, utambuzi wa kitu kulingana na YOLO, na uundaji wa kuruka. Yake 3mm sura ya nyuzi za kaboni inahakikisha uimara na utulivu wa kipekee, uliojaribiwa katika hali mbaya. Jukwaa hili linaweza kubinafsishwa sana, linatoa vipengele kama vile usaidizi wa kituo cha ardhini cha Kichina/Kiingereza cha QGC, upanuzi wa kawaida na mafunzo ya kina, na kuifanya kuwa bora kwa programu za utafiti, ushindani na maendeleo.
Vipimo
Ndege
| Kigezo | Vipimo |
|---|---|
| Jina | Drone ya S2-F290 Inayoweza Kupangwa |
| Uzito wa Upakiaji | 2400g |
| Mfano | S2-F290 |
| Usahihi wa Kuweka GPS | ≈1–2m |
| Msingi wa magurudumu | 290 mm |
| Uzito wa Juu wa Kuondoka | 3190g |
| Betri | Betri ya Kawaida ya 6000mAh |
| Umbali wa Kudhibiti | 10KM (Inapendekezwa ndani ya 1000m) |
| Upinzani wa Upepo | Kiwango cha 3-4 |
| Mazingira ya Uendeshaji | Ndani/Nje |
| Matokeo ya Mtihani wa Uvumilivu | Maelezo |
|---|---|
| Propela | 7-inch |
| Uwezo wa Betri | 6S 6000mAh (5300mAh imetumika) |
| Mazingira | Isiyo na upepo |
| Wakati wa Ndege | Dakika 11 sekunde 30 |
Kidhibiti cha Ndege
| Sehemu | Vipimo |
|---|---|
| Kichakataji cha FMU | STM32H743 Cortex-M7, 480MHz, 2MB Flash, 1MB SRAM |
| Kichakataji cha IO | STM32F103 Cortex-M3, 72MHz, 64KB SRAM |
| Sensorer | Kipima kasi/Gyroscope: ICM-42688-P |
| Kipima kasi/Gyroscope: BMI055 | |
| Magnetometer: IST8310 | |
| Barometer: MS5611 | |
| Iliyopimwa Voltage | Upeo wa Nguvu ya Kuingiza Data: 6V |
| Uingizaji wa Nguvu wa USB: 4.75-5.25V | |
| Ingizo la Servo: 0-36V | |
| Iliyokadiriwa Sasa | Telemetry 1 Max Pato la Sasa: 1A |
| Pamoja ya Sasa kwa Bandari Nyingine: 1A | |
| Data ya Mitambo | Vipimo: 53.3 × 39 × 16.2 mm |
| Uzito: 39.2g | |
| Bandari | - Matokeo 14 ya PWM (8 kutoka IO, 6 kutoka FMU) |
| - Bandari 2 za Kusudi la Jumla | |
| - Bandari 2 za GPS | |
| - Bandari 1 ya I2C | |
| - 2 CAN Bandari | |
| - Ingizo la RC la Spektrum/DSM, S.BUS, CPPM, n.k. | |
| - Mlango wa Kuingiza Nguvu | |
| Sifa Nyingine | Joto la Kuendesha: -40–85°C |
Kompyuta ya Onboard
| Sehemu | Vipimo |
|---|---|
| Nguvu ya Kompyuta | 40 JUU |
| GPU | 32 Tensor Cores yenye 1024-core NVIDIA Ampere GPU |
| CPU | 6-core Arm Cortex-A78AE v8.2 64-bit, 1.5GHz |
| RAM | 8GB 128-bit LPDDR5 68GB/s |
| Hifadhi | Kadi ya SD au NVMe ya Nje |
| Max CPU Frequency | GHz 1.5 |
Kidhibiti cha Mbali
| Sehemu | Vipimo |
|---|---|
| Voltage ya Uendeshaji | 4.2V |
| Uendeshaji wa Sasa | 100mA |
| Mkanda wa Marudio | GHz 2.4–2.483 |
| Uzito | 525g |
| Vipimo | 130 × 150 × 20 mm |
| Maisha ya Betri | Saa 20 |
| Kuchaji Bandari | MICRO-USB |
| Safu ya Kudhibiti | 7KM |
GPS
| Sehemu | Vipimo |
|---|---|
| Kipokea Satelaiti | UBLOX-M9, Vituo 92 |
| Dira ya Kielektroniki | QMC5883L |
| Mifumo ya Satelaiti | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Vituo vya Satellite | 32 |
| Kiwango cha Sasisho | 25Hz |
| Usahihi wa Kuweka | 1.5m CEP (mazingira bora) |
| Muda wa Kuanzisha | Mwanzo wa Baridi: 24s, Mwanzo wa Moto: 1s |
| Vipimo | 25 × 25 × 8 mm |
| Uzito | 12g |
Betri
| Sehemu | Vipimo |
|---|---|
| Aina ya kiunganishi | XT60 |
| Malipo Yanayopendekezwa ya Sasa | 3–5A |
| Uwezo wa Betri | 6000mAh |
| Majina ya Voltage | 22.2V |
| Kiwango cha Utoaji | 75C |
| Vipimo | 50 × 44 × 158 mm |
| Uzito | 816g |
LiDAR
| Sehemu | Vipimo |
|---|---|
| Laser Wavelength | 905nm |
| Masafa | Uakisi wa 40m @ 10%, Uakisi wa 70m @ 80%. |
| Kiwango cha chini cha eneo la kugundua | 0.1m |
| Uwanja wa Maoni | Mlalo: 360 °, Wima: -7 ° hadi 52 ° |
| Pointi Cloud Output | 200,000 pointi/sekunde |
| Kiwango cha Pointi | 10Hz |
| Kiwango cha Ulinzi | IP67 |
| Nguvu | 6.5W (mazingira 25°C) |
| Mgawanyiko wa Voltage | 9–27V DC |
| Vipimo | 65 × 65 × 60 mm |
| Uzito | 265g |
Kamera ya kina
| Sehemu | Vipimo |
|---|---|
| Teknolojia ya kina | Infrared mbili |
| Pembe ya Kutazama kwa Kina | 87° × 58° (Mlalo × Wima) |
| Azimio la Kina | 1280 × 720 |
| Usahihi wa Kina | <2% ndani ya 2m |
| Kiwango cha Fremu ya Kina | 90fps |
| Safu ya Kina | 0.3-3m |
| Vipimo | 90 × 25 × 25 mm |
| Mazingira ya Uendeshaji | Ndani/Nje |
Kamera ya lenzi moja
| Sehemu | Vipimo |
|---|---|
| Azimio la Juu | MP 2 (1920 × 1080) |
| Kiwango cha Juu cha Fremu | 30fps |
| Uwanja wa Maoni | ~90° |
| Urefu wa Cable | ~1.5 m |
| Vipimo | 35 × 35 × 30 mm |
Jedwali la Kazi
| kukatwa | Usanidi wa Msingi | Chaguo la D435 | Chaguo la D435 + 4G Moduli |
|---|---|---|---|
| Kushikilia urefu, kuelea, kurudi nyumbani | ✔ | ✔ | ✔ |
| Kutua, utulivu, ndege ya njia | ✔ | ✔ | ✔ |
| Ndege ya udhibiti wa mbali | ✔ | ✔ | ✔ |
| Mawasiliano kati ya kidhibiti cha ndege na kompyuta ya ndani | ✔ | ✔ | ✔ |
| Utambuzi wa msimbo wa QR na kutua | ✔ | ✔ | ✔ |
| Utambuzi wa kitu na kuacha | ✔ | ✔ | ✔ |
| Kuchora ramani kwa wakati mmoja na kuepusha vikwazo | ✔ | ✔ | ✔ |
| 3D LiDAR ramani na nafasi | ✔ | ✔ | ✔ |
| Utambuzi wa kitu kulingana na YOLO | ✘ | ✔ | ✔ |
| Utambuzi na ufuatiliaji wa kitu | ✘ | ✔ | ✔ |
| Kidhibiti cha Mbali cha 4G | ✘ | ✘ | ✔ |
Kifurushi kinajumuisha
Usanidi wa Msingi
- Fremu: F290 Carbon Fiber Frame
- Magari: 4× T-motor F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Propela: Propela za 4 × 7-inch Tri-Blade
- Kidhibiti cha Ndege: Pixhawk6mini
- Betri: 6S Betri ya Kawaida 6000mAh
- Chaja: Chaja ya Betri ya 6S
- Kompyuta ya Onboard: Jetson Orin Nano 8G + WIFI Moduli
- SSD: 256G
- LiDAR: Livox MID360
- Kamera: 150° Kamera ya USB yenye pembe pana
- Kidhibiti cha Mbali: Cloud T10 (pamoja na kipokea data)
Usanidi wa Hiari: D435
Inajumuisha vipengele vyote kutoka kwa Usanidi wa Msingi, pamoja na:
- Kamera ya Lenzi Mbili: D435
Usanidi wa Hiari: D435 + 4G Moduli
Inajumuisha vipengele vyote kutoka kwa Msingi Usanidi, pamoja na:
- Kamera ya Lenzi Mbili: D435
- Moduli ya 4G
Maelezo
Drone ya S2-F290 Inayoweza Kupangwa
- ✔ Usaidizi wa Kiufundi, Huduma ya Baada ya Mauzo bila Hassle
- ✔ Hutoa Mifano ya Ushindani, Inayoweza Kubinafsishwa
- ✔ Kichina/Kiingereza Mobile Ground Station
- ✔ Utulivu wa Juu, Utendaji wa Juu
- ✔ Ndani/Nje
S2-F290 ni ndege ya kisasa isiyo na rubani iliyoundwa kwa ajili ya mbio za ndege zisizo na rubani, ikibobea katika utafutaji na uvumbuzi.Iliyoundwa ili kuunganisha teknolojia ya juu na ubunifu usio na kikomo, ina uwezo wa kukabiliana na mazingira mbalimbali magumu, na kufanya uchunguzi wa angani kupatikana zaidi na ufanisi.
Ndege hii isiyo na rubani ina muundo thabiti na nguvu kubwa. Inatoa mifano mingi ya ushindani, kuruhusu watumiaji kufahamu kwa haraka na kuboresha utendaji wake. Ikiwa na kituo maalum cha ardhini cha Kichina/Kiingereza, inaboresha sana urahisi wa uendeshaji wa drone. Zaidi ya hayo, hutoa maelezo shindani ya msimbo wa chanzo na ubinafsishaji ili kuhakikisha watumiaji wanaweza kufikia utendakazi wanaotaka kwa muda mfupi zaidi huku wakifanya vyema katika matukio ya ushindani.

Kukidhi Mahitaji ya Maendeleo / Ushindani / Utafiti
| Kategoria | Maelezo |
|---|---|
| Maarifa ya Msingi ya ROS | - Udhibiti wa mbali |
| - Mawasiliano kati ya Kidhibiti cha Ndege na Kompyuta ya Onboard | |
| Kazi za Msingi | - Upangaji wa Njia |
| - Utambuzi wa Msimbo wa QR na Nafasi | |
| - Patrol Autonomous Offboard | |
| Kazi za Juu | - Utambuzi wa Msimbo wa QR kwa Kutua |
| - Utambuzi wa kitu na Kuacha | |
| - Kuweka Ramani kwa Wakati Mmoja na Kuepuka Vikwazo | |
| - Ramani ya 3D LiDAR na Msimamo | |
| - Utambuzi wa Kitu kulingana na YOLO | |
| - Usambazaji wa Video unaotegemea Wavuti | |
| - Kuruka kwa Malezi ya Nje | |
| - Malezi ya Ushirikiano wa Ardhi-Air | |
| Kazi za Hiari za Kamera ya D435 | - VINS Visual Positioning |
| - Utambuzi na Ufuatiliaji wa Kitu kulingana na YOLO | |
| Kazi za Hiari za Mawasiliano ya 4G | - Udhibiti wa Mbali wa 4G |
Kuepuka Vikwazo vya Kujiendesha, Uhakikisho wa Usalama wa Kina
Ikitumia 3D LiDAR kwa kuepusha vizuizi vinavyojitegemea, ndege isiyo na rubani inachanganya upangaji wa njia za kimataifa na uepukaji wa vizuizi vya ndani ili kugundua vizuizi kutoka pande zote kwa usahihi. Inaauni kusimama kiotomatiki na vile vile kukimbia kwa mfululizo, kuwezesha uepukaji rahisi wa vitu kwenye njia ya ndege, kuhakikisha matumizi salama ya ndege.

Utambuzi wa Msimbo wa QR na Kutua
Ndege isiyo na rubani huwasha kamera na moduli ya utambuzi wa msimbo wa QR ili kupata taarifa ya muda halisi ya msimbo wa QR. Wakati wa mteremko, ndege isiyo na rubani hurekebisha mkao wake kwa nguvu, na kuhakikisha mpatano sahihi na uga wa mwonekano wa kamera kabla ya kuendelea kutua.
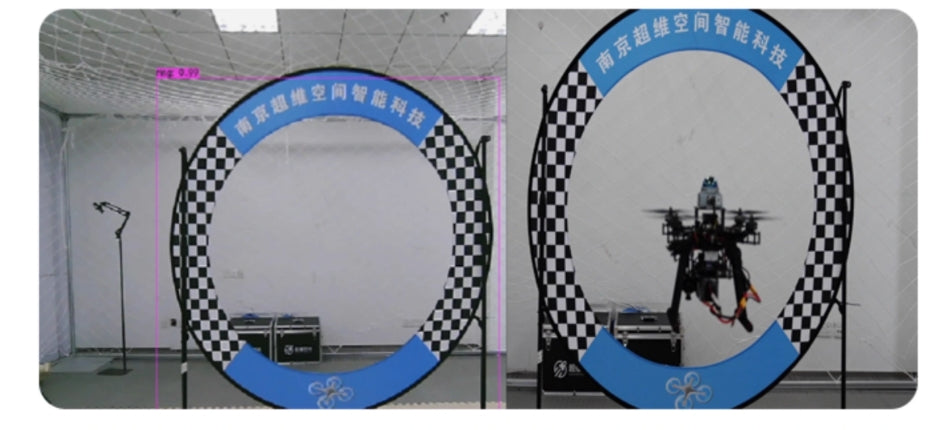
Utambuzi wa Kitu cha YOLO
Ndege isiyo na rubani hutumia YOLOv8 kwa utambuzi wa kitu, kupata maelezo ya mahali ya fremu ya duara kwa wakati halisi. Inabadilisha msimamo wake kwa uhuru na inapita kupitia sura ya mviringo.
Kuruka kwa Malezi ya Nje
Ndege isiyo na rubani hutumia teknolojia ya kuunda makundi, kuwezesha udhibiti ulioratibiwa wa ndege nyingi zisizo na rubani ili kufanikisha safari ya uundaji.Kwa kuongeza mawasiliano ya hali ya juu na algorithms ya udhibiti wa ushirikiano, hurahisisha mawasiliano ya wakati halisi na ubadilishanaji wa habari kati ya drones, kusawazisha mienendo na nafasi zao ili kuunda muundo thabiti.

Malezi ya Ushirikiano wa Ardhi-Air
Jukwaa hili linaauni uundaji shirikishi kati ya ndege zisizo na rubani za ardhini na angani. Kwa kutumia mtandao wa eneo la karibu wenye miundo ya topolojia kwa muunganisho wa kifaa, hutumia mawasiliano ya UDP na itifaki maalum ili kuhakikisha mawasiliano ya kasi ya juu na thabiti. Kwa udhibiti wa PID, inafanikisha kufuata kulandanishwa kati ya ndege isiyo na rubani kuu na drone nyingi za watumwa, kuhakikisha uthabiti wa uundaji na ufanisi wa kufanya kazi.

Mfano wa Ushindani
Hutoa matukio ya kipekee ya ushindani na mwongozo wa hatua kwa hatua, kuwawezesha washiriki kukabiliana kwa urahisi na aina mbalimbali za mashindano.



Vipengele vya S2-F290 Programmable Drone
Utendaji wa Gharama ya Juu
- Imeundwa kwa ajili ya wanaoanza ili kupunguza mkondo wa kujifunza na kurahisisha kusimamia utendakazi wa ndege zisizo na rubani.
- Ime bei ya kumudu, na kuifanya drone bora ya kujifunza kwa wanafunzi na wapendaji.
Utulivu wa Juu
- Ilijaribiwa katika hali tofauti mbaya zaidi ya miaka mitatu.
- Imewekwa na fremu ya nyuzinyuzi ya kaboni yenye unene wa mm 3 kwa uimara na uthabiti ulioimarishwa.
- Huruhusu watumiaji kupata kutambuliwa katika matumizi yao ya kwanza ya shindano.
Kupanuka
- Inasaidia ubinafsishaji wa hali ya juu kwa programu anuwai.
- Inatumika na vipengele mbalimbali vya upanuzi ili kuboresha utendakazi na utendaji wa drone kila mara.
Huduma Isiyo na Wasiwasi Baada ya Mauzo
- Timu ya wataalamu inayotoa mwongozo na usaidizi wa kina.
- Hutoa matengenezo ya bure kwa uharibifu wa maunzi unaosababishwa na hitilafu za uendeshaji wakati wa kipindi cha udhamini (bila kujumuisha vifaa na betri).
Inaweza kubinafsishwa
- Hutoa usaidizi kwa maendeleo ya kipekee katika ROS na QGC.
- Inaauni usahihi wa juu wa zaidi ya 98% kwa ramani na urambazaji.
- Inatumika na moduli za RTK/GPS, nembo, na utendakazi mbalimbali wa kipekee.

Usanidi wa Kituo cha Chini
Kutumia Kidhibiti cha Ndege cha Pixhawk 2.4.8
Kikiwa na kichakataji cha kisasa cha 32-bit STM32F427 na kipima kipimo cha MS5611, kidhibiti hiki cha safari ya ndege hutoa miingiliano mingi na utendakazi wa gharama ya juu kama chaguo huria.
1. Kituo cha Kipekee cha QGC kilichobinafsishwa kwa undani
- Inafikia zaidi ya 98% ujanibishaji katika Kichina.
- Inaauni vipengele vya kina kama vile NTRIP.
2. Mobile QGC Ground Station
- Hutoa toleo la rununu la kituo cha chini cha QGC, kuwezesha utendakazi bila mshono kutoka kwa simu mahiri.
3. Muunganisho wa moja kwa moja wa Wi-Fi au 4G
- Unganisha tu kupitia Wi-Fi ili kufanya kazi kwa kutumia simu mahiri au kompyuta.
- Kumbuka: Mfumo wa "ezuav" unaonyesha kuwa umeunganishwa kwenye kifaa lakini hauwezi kutoa ufikiaji wa mtandao.

Mafunzo ya Kina na Rasilimali za Chanzo Huria Kabisa
- Mafunzo ya kina ya matumizi yanayojumuisha vipengele vyote vya utendakazi wa ndege isiyo na rubani ya S2-F290.
- Nyenzo huria kabisa, ikijumuisha:
- Utangulizi wa programu na miongozo ya usakinishaji.
- Mafunzo ya vipengele vya msingi na vya hali ya juu, kama vile utambuzi wa kitu kulingana na OpenCV, ramani ya 3D na safari ya ndege inayojitegemea.
- Maagizo maalum ya ukuzaji wa mawasiliano ya PX4 na MAVLink.
- Utatuzi wa Maswali Yanayoulizwa Mara kwa Mara, usanidi wa mazingira wa ROS, na hatua za uendeshaji.
Related Collections


