









SteadyWin GIM3510-8 moduli ndogo ya kiungo cha roboti, gia ya sayari 8:1, dereva wa CAN, enkoda mbili, 24V 60W
SteadyWin GIM3510-8 moduli ndogo ya kiungo cha roboti, gia ya sayari 8:1, dereva wa CAN, enkoda mbili, 24V 60W
SteadyWin
Couldn't load pickup availability
Muhtasari
Moduli ndogo ya pamoja ya roboti ya SteadyWin GIM3510-8 ni actuators ya pamoja ya roboti iliyounganishwa ambayo inachanganya motor ya Aloha, reducer ya gia ya sayari ya 8:1, dereva wa mawasiliano uliojengwa ndani, na encoders mbili katika kifurushi kidogo cha silinda. Ikiwa na usambazaji wa nominali wa 24 V (aina pana ya 12–40 V au 12–48 V kulingana na bodi ya dereva), kasi ya juu ya pato hadi 564.6 rpm baada ya kupunguza, na mawasiliano ya CAN bus, imeundwa kwa roboti za kibinadamu zenye ufanisi, mikono ya roboti, majukwaa ya kusafiri, na mifumo mingine ya multi-axis inayohitaji udhibiti sahihi wa mwendo wa mzunguko.
Vipengele Muhimu
- Kupunguza kasi ya sayari ya juu: Gearbox ya sayari ya 8:1 yenye kasi ya pato iliyoainishwa ya 535.5 rpm na kiwango cha juu cha 564.6 rpm (GDZ34), inayofaa kwa viungo vinavyohamia haraka.
- Aina pana ya voltage: Uendeshaji wa nominali wa 24 V na aina ya ingizo ya 12–40 V (GDZ34) au 12–48 V (GDS34) kwa muundo wa mfumo wa nguvu unaoweza kubadilika.
- Matokeo ya torque yenye ufanisi: Kiwango cha torque hadi 0.32 N.m/A na torque iliyokadiriwa hadi 1.68 N.m na torque ya kilele hadi 6.02 N.m, ikitoa uhamasishaji wa nguvu wenye ufanisi kwa viungo vya roboti vya mwanga hadi wastani.
- Dereva iliyounganishwa na CAN bus: Bodi ya dereva iliyojengwa (GDS34 au GDZ34) inasaidia mawasiliano ya CAN kwa ajili ya wiring rahisi na udhibiti wa mtandao.
- Maoni ya encoder mara mbili: Encoder wa bit 14 kwenye dereva na encoder ya pili kwenye shimoni la pato kwa maoni sahihi ya nafasi na kasi.
- Muundo wa kompakt: Kipenyo cha nje cha 46 mm pekee na urefu wa jumla kutoka 46.5 mm (bila dereva) hadi 51.5 mm (na dereva), ikiruhusu mipangilio ya viungo vingi yenye msongamano.
- Kudumu kwa mazingira: Kiwango cha ulinzi cha IP54, joto la kufanya kazi kutoka -20°C hadi +80°C, na kiwango cha kelele chini ya 60 dB.
- Funguo za ulinzi: Ulinzi wa joto kupita kiasi, voltage kupita kiasi, na mzigo kupita kiasi husaidia kudumisha uendeshaji salama na wa kuaminika katika mifumo ya roboti ya kazi ya muda mrefu.
- Uthabiti wa mitambo: Inasaidia mzigo wa axial hadi 75 N na mzigo wa radial hadi 300 N kwenye shat ya pato, ikiwa na backlash ya reducer ya 15 arcmin.
- Chaguo la breki maalum: Inasaidia uunganisho wa breki maalum kwa viungo vinavyohitaji torque ya kushikilia wakati havina nguvu.
Kwa msaada wa kiufundi, uboreshaji, au maswali ya uunganisho kuhusu moduli ndogo ya kiungo cha roboti GIM3510-8, tafadhali wasiliana na https://rcdrone.top/ au tuma barua pepe kwa [email protected].
Maombi
- Roboti za kibinadamu
- Michelini ya roboti
- Exoskeletons
- Roboti za wanyama wanne
- Magari ya AGV
- Roboti za ARU
Vipimo
| Parameta | Kitengo | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Mfano | - | GIM3510-8 | GIM3510-8 |
| Mfano wa bodi ya dereva | - | GDS34 (SDC101) | GDZ34 |
| Voltage ya kawaida | V | 24 | 24 |
| Kiwango cha voltage | V | 12–48 | 12–40 |
| Nguvu iliyopimwa | W | 98 | 60 |
| Torque iliyopimwa | N.m | 1.68 | 1.00 |
| Mzigo wa kilele | N.m | 3.41 | 6.02 |
| Spidi iliyoainishwa baada ya kupunguza | rpm | 430 | 535.5 |
| Spidi ya juu baada ya kupunguza | rpm | 529 | 564.6 |
| Upeo wa sasa | A | 4.1 | 2.5 |
| Upeo wa sasa wa kilele | A | 8.30 | 25.30 |
| Upinzani wa awamu | ohm | 0.48 | 0.48 |
| Induktansi ya awamu | mH | 0.31 | 0.31 |
| Thamani ya spidi | rpm/V | 22.04 | 23.53 |
| Thamani ya mzigo | N.m/A | 0.44 | 0.32 |
| Idadi ya jozi za nguzo | Majonzi | 7 | 7 |
| Uwiano wa gia | - | 8:1 | 8:1 |
| Aina ya gia | - | Planetary | Planetary |
| Nyenzo za gia ya kupunguza | - | ALU | ALU |
| Kurudi nyuma kwa gia ya kupunguza | arcmin | 15 | 15 |
| Uzito wa motor bila dereva | g | 247.6 | 247.6 |
| Uzito wa motor na dereva | g | 259.6 | 259.6 |
| Ukubwa bila dereva (kipenyo x urefu) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Ukubwa na dereva (kipenyo x urefu) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Max uzito wa axial | N | 75 | 75 |
| Max uzito wa radial | N | 300 | 300 |
| Kelele | dB | <60 | <60 |
| Mawasiliano | - | CAN | CAN |
| Encoder ya pili kwenye shat ya pato | - | NDIYO | NDIYO |
| Daraja la ulinzi | - | IP54 | IP54 |
| Joto la kufanya kazi | °C | -20 hadi +80 | -20 hadi +80 |
| Azimio la encoder (encoder ya dereva) | bit | 14 | 14 |
| Usaidizi wa encoder tofauti | - | HAPANA | HAPANA | Msaada wa breki wa kawaida | - | NDIYO | NDIYO |
Maelekezo
- SteadyWin_GIM3510-8_Mchoro_wa_Usanidi.stp
- GlM3510-8_mchoro_wa_ufungaji.pdf
- Gl3510-8_pamoja_na_mchoro_wa_ufungaji_wa_kikosi.pdf
Maelezo

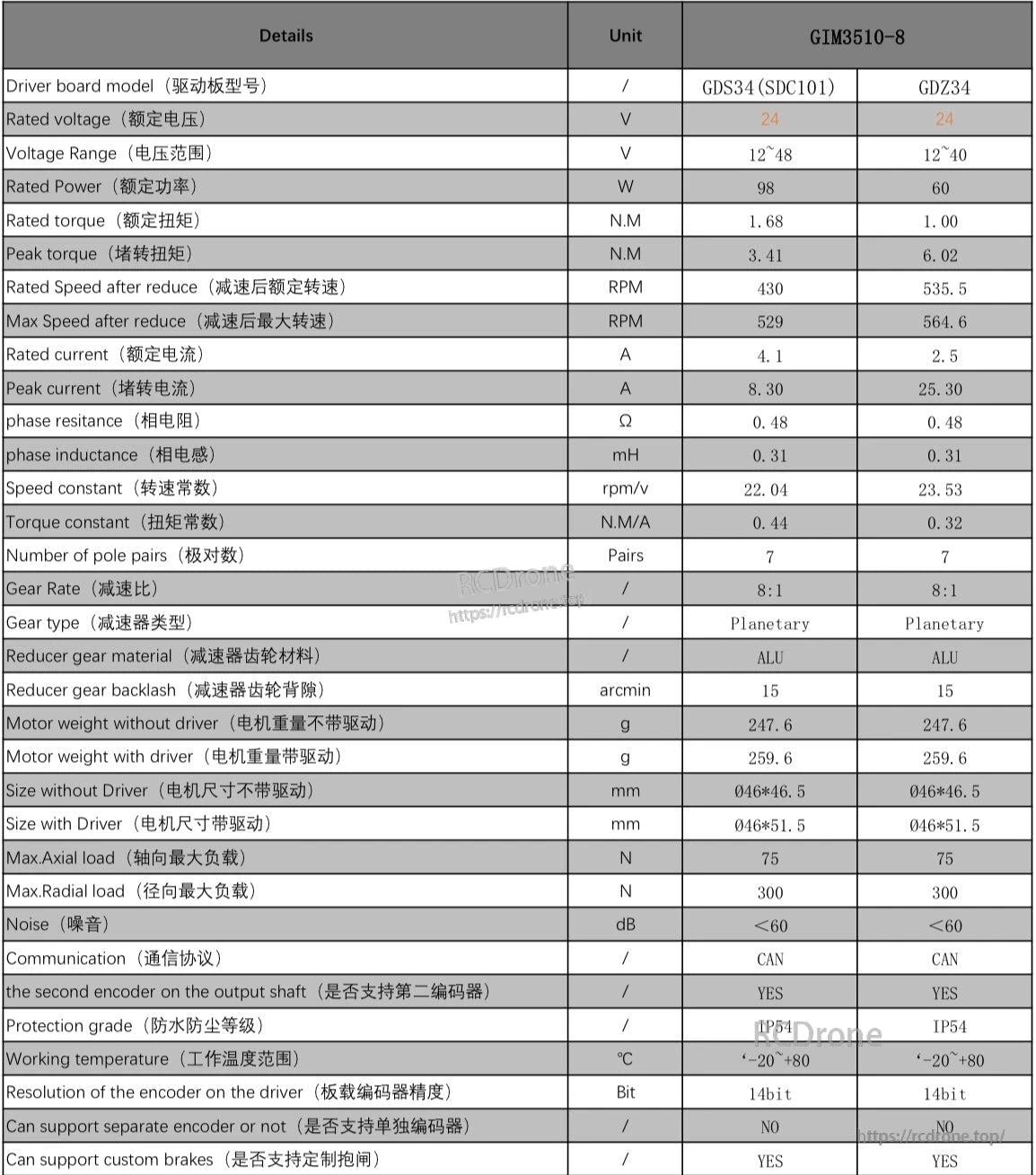
GIM3510-8 vipimo vya kiunganishi vya roboti ikilinganishwa na bodi za dereva GDS34 na GDZ34. Vipimo muhimu ni pamoja na voltage, nguvu, torque, kasi, sasa, uzito, ukubwa, uwezo wa mzigo, kelele, mawasiliano, encoder, kiwango cha ulinzi, anuwai ya joto, na msaada wa breki maalum.
Related Collections









