CUAV RM3100 C-Compass Magnetometer ya Usahihi wa Juu ya Nje kwa Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV RM3100 C-Compass Magnetometer ya Usahihi wa Juu ya Nje kwa Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV
Regular price
$203.00 USD
Regular price
Sale price
$203.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
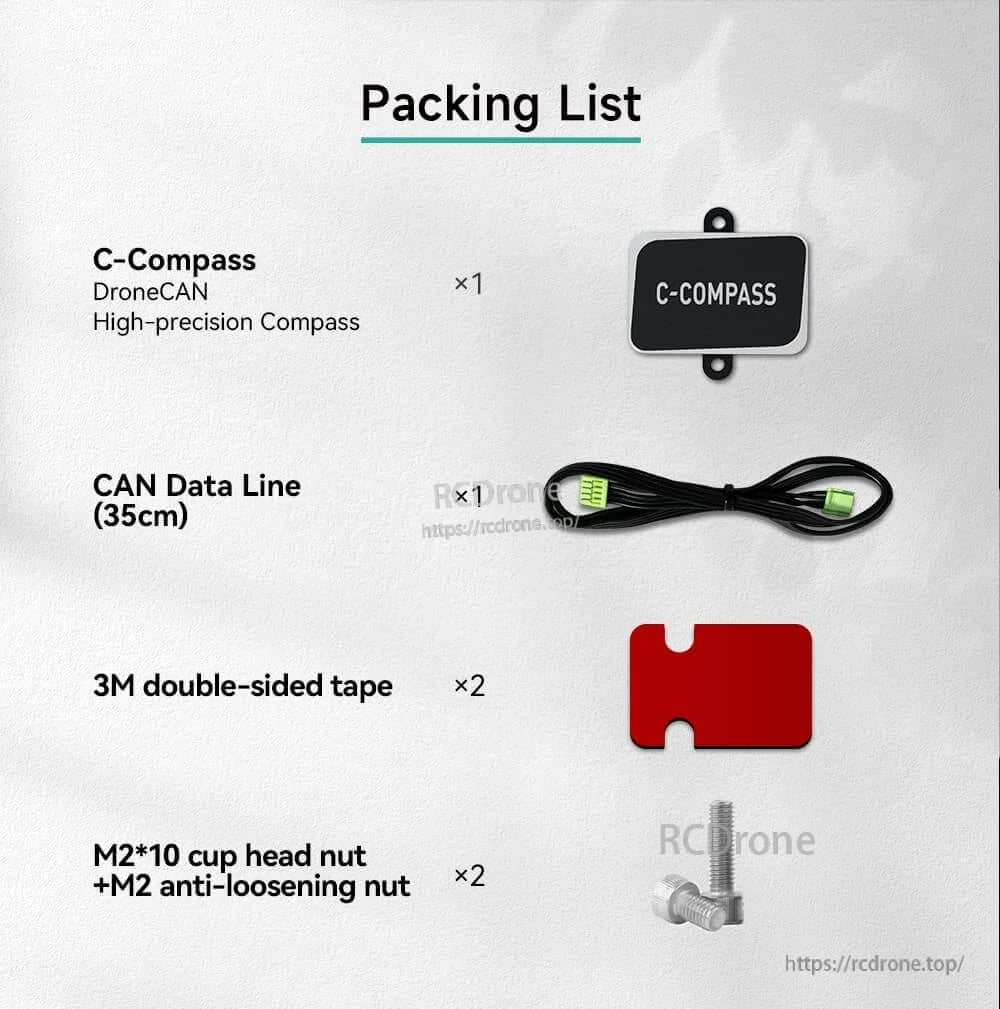
CUAV C-Compass ni kompasu wa nje (magnetometer yenye usahihi wa juu) iliyojengwa kuzunguka sensa ya magnetic RM3100 kwa mifumo ya udhibiti wa Pixhawk na PX4. Inatumia mawasiliano ya basi ya DroneCAN/UAVCAN na inafaa na majukwaa ya ArduPilot na PX4, ikiwa na processor ya ndani ya STM32F4 inayotumia usanifu wa programu wa CUAV M4C kwa kipimo thabiti cha mwelekeo katika mifumo ya ndege yenye kelele za umeme.
Vipengele Muhimu
- Sensor wa RM3100 wa sumaku
- Processor wa ndani wa STM32F4
- Muundo wa programu wa M4C ulioendelezwa na CUAV
- Inafaa na jukwaa la programu ya kuruka la APM/PX4
- Uungwaji mkono wa itifaki ya DroneCAN/UAVCAN
- Imeundwa kwa ajili ya utendaji wa kelele ya chini na kupambana na kuingiliwa inapokuwa kama kompas ya nje
Maelezo ya Kiufundi
| MCU | STM32F412 (32 Bit Arm Cortex-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| Sensor | RM3100 |
| Muundo wa Programu | CUAV M4C |
| Itifaki | DroneCAN/UAVCAN |
| Kiwango cha Mawasiliano | 2Mb |
| Kiwango cha Kurekebisha | 80Hz |
| Kelele | 15nT |
| Usahihi | 0.25° (thamani halisi) |
| Usahihi wa Kurudiwa | 0.05° |
| Ufafanuzi | 0.01° |
| Hisia | 13nT |
| Kiwango | -800 μT hadi +800 μT |
| Aina ya Kidhibiti | PX4/ArduPilot (CUAV/Pixhawk nk.) |
| Kiunganishi | GHR-04V-S |
| Voltage ya Kufanya Kazi | 4.75-5.3V |
| Joto la Kufanya Kazi | -20 hadi 80°C |
| Unyevu wa Kufanya Kazi | 5% hadi 95% (isiyo na mvua) |
| Nyenzo ya Kifuniko | Alumini ya aloi |
| Ukubwa | 31.5 x 31.0 x 14.0mm |
| Uzito | 13g |
| Uzito Ulioorodheshwa | 0.5 kg |
| Vipimo Vilivyoorodheshwa | 20 x 10 x 10 cm |
Chaguzi
- C-Compass * 3 Pcs
- C-Compass & NEO 3 GPS / Set
- C-Compass & NEO 3 Pro GPS / Set
- C-Compass & NEO 3X GPS / Set
Maombi
- Kompassi ya nje/kuhisi mwelekeo kwa ajili ya ujenzi wa Pixhawk na CUAV autopilot zinazotumia PX4 au ArduPilot
- Kuboresha uthabiti wa kipimo cha magnetic kwa kufunga mbali na vyanzo vya kuingilia (nyaya, betri, motors)
Kwa maswali ya uunganisho na ufanisi (DroneCAN/UAVCAN mipangilio, ArduPilot/PX4 vigezo, wiring), wasiliana na [email protected] or tembelea https://rcdrone.top/ .
Related Collections