seti ya iFlight GM5208-12 Encoder Combo kwa Kistabilisha cha Brushless 3-Axis Gimbal (AS5048A, Alexmos 32BIT)
seti ya iFlight GM5208-12 Encoder Combo kwa Kistabilisha cha Brushless 3-Axis Gimbal (AS5048A, Alexmos 32BIT)
iFlight
Regular price
$553.83 USD
Regular price
Sale price
$553.83 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
Seti ya iFlight GM5208-12 Encoder Combo inaongeza encoders kwa kila motor ya gimbal isiyo na brashi ili mfumo wa kudhibiti gimbal uweze kufuatilia nafasi ya motor kwa usahihi zaidi kwa ajili ya kuboresha utulivu na ufanisi wa nguvu bora. Katika gimbal ya utulivu wa axisi 3, utulivu wa inerti wa passiv unahitaji usawa wa kamera kwa usahihi kwenye axisi za pan/tilt/roll, wakati utulivu wa aktiv unatumia sensorer kupima mwendo na kuupinga kwa kutumia motors kwenye kila axisi—encoders zinaunga mkono udhibiti huu wa aktiv kwa kuboresha mrejesho wa nafasi.
Vipengele Muhimu
- Kurekebisha gimbal kwa urahisi na kazi ya kalibrishaji iliyopunguzwa.
- Kuokoa nguvu; inasemekana muda wa kazi ni mara 5 zaidi kuliko gimbals zisizo na mfumo wa encoder.
- IMU mbili.
- Majibu ya haraka; inasemekana kuongezeka kwa torque mara moja na tabia bora katika pembe ngumu za kuzunguka.
- Chip ya encoder: AS5048A.
Kwa maswali ya ulinganifu (kikontrol cha gimbal, wiring, na usanidi), wasiliana na https://rcdrone.top/ au [email protected].
Specifikesheni
| Mfano | GM5208 |
| Upeo wa Motor | Ф63±0.05mm |
| Usanidi | 12N/14P |
| Kimo cha Motor | 30.7±0.2mm (ikiwemo na nyumba ya encoder) |
| Shat ya Hollow (OD) | Ф15-0.008/-0.012 mm |
| Shat ya Hollow (ID) | Ф12+0.05/0 mm |
| Urefu wa Waya | 610±3mm |
| Kebo AWG | #24 |
| Uzito wa Motor | 209±0.5g |
| Plug ya waya | 2.5mm dupont connector |
| Mzigo wa sasa bila mzigo | 0.09±0.1 A |
| Volti bila mzigo | 20V |
| RPM bila mzigo | 456~504 RPM |
| Upeo wa mzigo | 1A |
| Volti za mzigo | 20V |
| Torque ya mzigo (g) | 1800-2500 |
| Upinzani wa ndani wa motor | 15.2Ω±5% (upinzani hubadilika na joto) |
| Jaribio la voltage ya juu | DC500V 10mA @ 1sec |
| Upeo wa nyumba ya rotor | ≤0.1mm |
| Uelekezi (kupanua akseli) | kuzunguka kulia |
| Jaribio la joto la juu-nafuu (juu) | Hifadhi kwenye 60°C kwa masaa 100; motor inaweza kufanya kazi kawaida baada ya masaa 24 kwenye joto la kawaida |
| Jaribio la joto la juu-nafuu (nafuu) | Hifadhi kwenye -20°C kwa masaa 100; motor inaweza kufanya kazi kawaida baada ya masaa 24 kwenye joto la kawaida |
| Nguvu ya juu | ≤40W |
| Voltage ya Kazi | 3-5S |
| Joto la Kazi | -20 hadi 60°C; 10 hadi 90% RH |
Nini Kimejumuishwa
- 3 x GM5208-12 motor ya gimbal yenye AS5048A encoder & sumaku
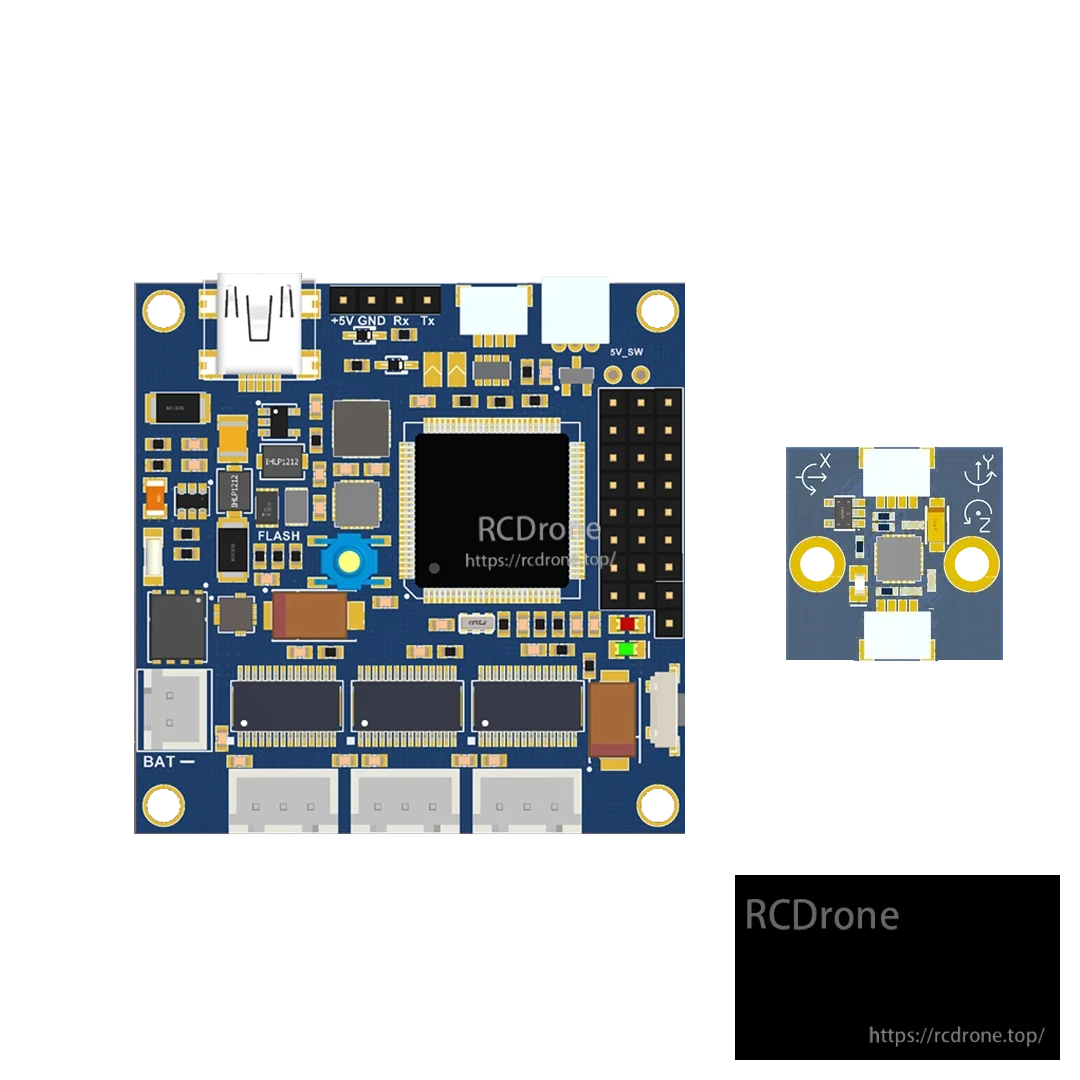
- 1 x bodi ya Alexmos 32BIT BGC (toleo la encoder, bila kesi ya alumini)
- 1 x seti ya nyaya za kuunganisha
Matumizi
- 3-axis brushless camera gimbal stabilization systems requiring encoder feedback
- Gimbal upgrades where improved position tracking and tuning efficiency are required
Related Collections