



SteadyWin DD4015 Motor 24V RS485/CAN Kichanganuzi Kamili 14bit 0.25 N.M 125rpm 114g -20~80℃
SteadyWin DD4015 Motor 24V RS485/CAN Kichanganuzi Kamili 14bit 0.25 N.M 125rpm 114g -20~80℃
SteadyWin
Regular price
$152.00 USD
Regular price
Sale price
$152.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
Motor ya SteadyWin DD4015 ni motor ndogo yenye mawasiliano ya RS485 / CAN na encoder ya absolute ya mzunguko mmoja (14bit). Imepangwa kwa uendeshaji wa 24V wa kawaida (10~28V anuwai) na inafaa kwa uendeshaji wa roboti ambapo mrejesho wa nafasi wa mzunguko umehitajika.
Vipengele Muhimu
- Mawasiliano: RS485 / CAN
- Encoder: Mzunguko mmoja wa absolute, azimio la 14bit
- Torque ya kawaida: 0.25 N.M; torque ya kilele: 0.35 N.m
- Speed ya kawaida: 125 rpm; kasi ya juu bila mzigo: 1013 rpm
Maelezo ya Kitaalamu
| Parameta | Thamani |
|---|---|
| Voltage ya kawaida | 24V |
| Anuwai ya voltage | 10~28V |
| Current ya kawaida | 1.2A |
| Power ya kawaida | 28.8W |
| Torque ya kawaida | 0.25N.M |
| Speed ya kawaida | 125rpm |
| Max speed bila mzigo | 1013 rpm |
| Torque ya kilele | 0.35 N.m |
| Current ya kilele | 1.85A |
| Constant ya speed | 42.21rpm/v |
| Constant ya torque | 0.17N.M/A |
| Idadi ya jozi za pole | 11Pairs |
| Upinzani wa awamu | 12.57Ω |
| Inductance ya awamu | 2.48Mh |
| Mawasiliano | RS485 / CAN |
| Aina ya encoder | Single-turn absolute |
| Ufafanuzi | 14bit |
| Uzito wa motor | 114g |
| Joto la kazi | -20~80℃ |
Mitambo / Usanidi (kutoka kwa mchoro)
- Alama ya mfano: DD4015
- Upeo wa nje: Ø40 ±0.1
- Urefu wa jumla: 33 ±0.1
- Sehemu za urefu: 12.4 na 20.1
- Upeo wa shat: Ø5
- Mfano wa upande wa mbele: Ø20; 4-M3 (kimo ▽3); Ø13.6 (+0.05/0) (kimo ▽2); Ø12.6 (+0.1/0) (kimo ▽12)
- Mfano wa upande wa nyuma: Ø33; 4-M3 (kimo ▽4.5)
- Kiunganishi: SH1.0-8PIN
- SH1.0-8PIN ishara: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Matukio ya Maombi
- Roboti za Binadamu
- Micuku ya Roboti
- Exoskeletons
- Roboti za Mifugo Nne
- Magari ya AGV
- Roboti za ARU
Nyaraka
Kwa ajili ya wiring, uunganisho, au msaada wa kuagiza, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo
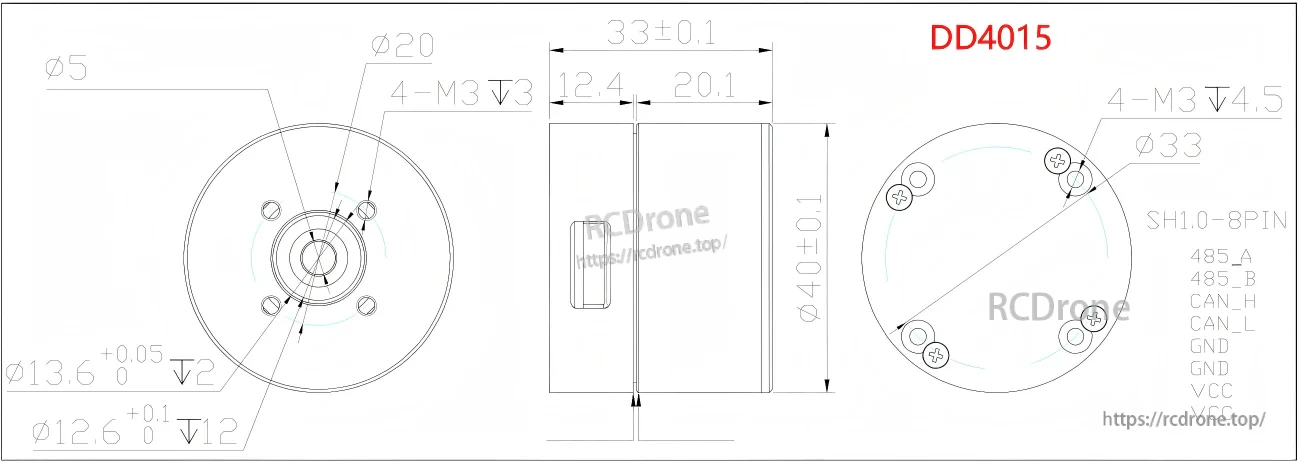
Vipimo vya mitambo na mifumo ya mashimo ya kufunga kwa DD4015, pamoja na pinout ya kiunganishi cha SH1.0 8-pin kwa wiring ya RS485 na CAN.
Related Collections



