



SteadyWin GB4310 Motor 24V yenye Chaguo la Encoder AS5048A/AS5600, 504RPM Kawaida, 0.2N·m Torque
SteadyWin GB4310 Motor 24V yenye Chaguo la Encoder AS5048A/AS5600, 504RPM Kawaida, 0.2N·m Torque
SteadyWin
Couldn't load pickup availability
Muhtasari
Motor ya SteadyWin GB4310 ni motor ya 24V iliyoundwa kwa ajili ya matumizi ya robotics na udhibiti wa mwendo. Inasaidia chaguo za encoder AS5048A/AS5600 na inafaa na encoders za 12-bit na 14-bit. Ufanisi wa slip-ring umeandikwa, ikiwa na utendaji thabiti kwa kasi za chini kwa gimbals na pods.
Vipengele Muhimu
- Mfano: GB4310
- Voltage ya kawaida: 24V
- Aina ya encoder: AS5048A/AS5600
- Inafaa na encoders za 12-bit na 14-bit
- Inafaa na slip-ring; thabiti kwa kasi za chini
Maelezo ya Kiufundi
| Parameta | Thamani |
|---|---|
| Mfano | GB4310 |
| Voltage ya Kawaida | 24V |
| Torque ya Kawaida | 0.2 N·m |
| Speed ya Kawaida | 504 RPM |
| Speed ya Juu | 1028 RPM |
| Current ya Kawaida | 0.9 A |
| Torque ya Kusimama | 0.49 N·m |
| Current ya Kusimama | 1.9 A |
| Zamu za winding za motor | 60T |
| Upinzani wa Awamu | 10.32 Ω |
| Inductance ya Awamu | 3.26 Mh |
| Kasi ya kudumu | 34.4 rpm/v |
| Torque ya kudumu | 0.23 N.M/A |
| Inertia ya rotor | 202 gcm^2 |
| Idadi ya jozi za pole | 14 Jozi |
| Uzito wa motor bila encoder | 112 g |
| Uzito wa motor na encoder | 128 g |
| Joto la juu la kutengua magneti | 120 °C |
| Joto la Kazi | 20~80 °C |
| Aina ya encoder | AS5048A/AS5600 |
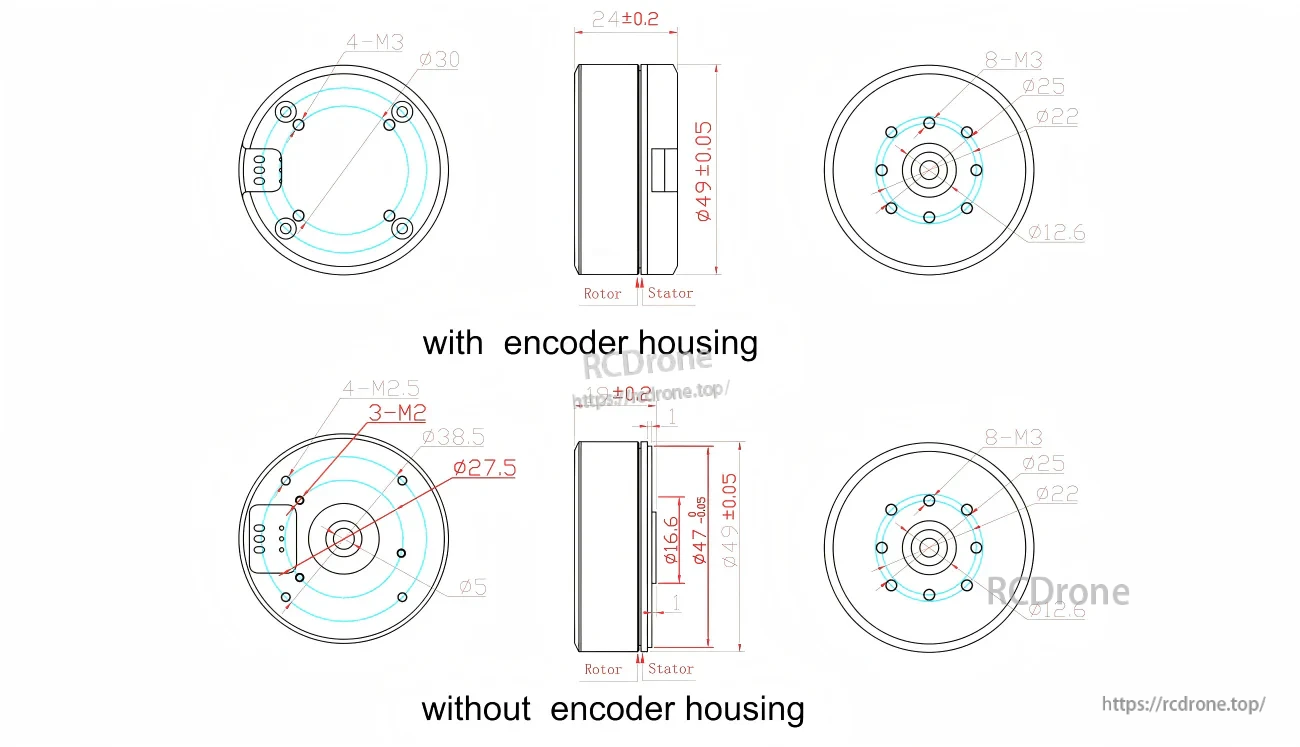
Vipimo vya Kifaa (kutoka kwa mchoro)
| Item | Thamani |
|---|---|
| Pamoja na nyumba ya encoder: mashimo ya kufunga | 4-M3 |
| Pamoja na nyumba ya encoder: mduara wa bolt / kipengele | φ30 |
| Pamoja na nyumba ya encoder: unene | 24 ±0.2 |
| Na nyumba ya encoder: kipenyo cha nje | φ49 ±0.05 |
| Na nyumba ya encoder: mashimo ya kufunga (upande wa kinyume) | 8-M3 |
| Na nyumba ya encoder: mzunguko wa bolt / kipengele | φ25, φ22 |
| Na nyumba ya encoder: kipengele cha katikati | φ12.6 |
| Bila nyumba ya encoder: mashimo ya kufunga | 4-M2.5; 3-M2 |
| Bila nyumba ya encoder: alama za kipenyo | φ38.5; φ27.5; φ5 |
| Bila nyumba ya encoder: unene | 18 ±0.2 |
| Bila nyumba ya encoder: vipenyo vilivyopangwa | φ16.1; φ7.9 -0.05 |
| Bila nyumba ya encoder: alama za kipenyo | φ47 ±0.05; φ49 ±0.05 |
| Bila nyumba ya encoder: mashimo ya kufunga (upande wa kinyume) | 8-M3 |
| Bila nyumba ya encoder: mzunguko wa bolt / kipengele | φ25, φ22 |
| Bila nyumba ya encoder: kipengele cha katikati | φ12.6 |
Maombi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons
- Roboti wanne kwa miguu
- Magari ya AGV
- Roboti za ARU
- Gimbals na pods (zilizoandikwa)
Maelekezo / Faili za CAD
Kwa msaada wa mauzo ya awali na ushirikiano, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo
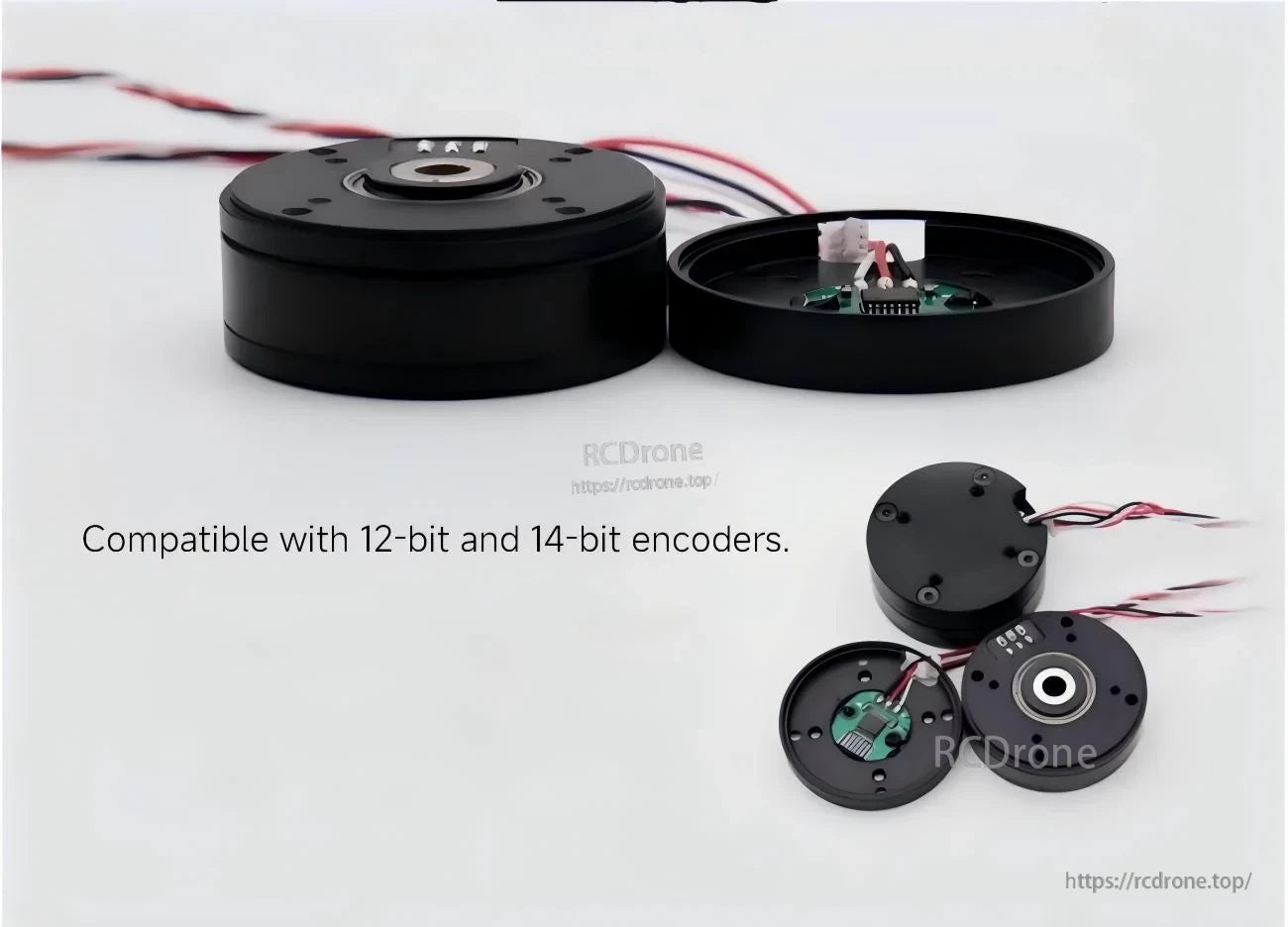
Muundo wa motor wa GB4310 unaoandaliwa kwa encoder unasaidia chaguo za AS5048A/AS5600 na azimio la encoder la bit 12 au 14 kwa mrejesho sahihi.

Ujenzi unaofaa wa slip-ring unafaa kwa gimbals, pods, na ujenzi mwingine wa kudhibiti mwendo ambao unahitaji uendeshaji thabiti wa kasi ya chini.
Tumia mifumo ya mashimo ya kufunga, mizunguko ya bolti, na alama za unene ili kulinganisha nafasi za bracket na makazi yako.
Related Collections



