SteadyWin GIM4305-10 Motor ya Kupunguza Kasi — 48W, Uwiano wa Gia 10:1, Torque 1 N·m, 300–366 RPM, CAN, IP54 kwa Vifaa vya Roboti
SteadyWin GIM4305-10 Motor ya Kupunguza Kasi — 48W, Uwiano wa Gia 10:1, Torque 1 N·m, 300–366 RPM, CAN, IP54 kwa Vifaa vya Roboti
SteadyWin
Couldn't load pickup availability
Muhtasari
Motor ya SteadyWin GIM4305-10 Planetary Reducer ni motor ndogo ya kupunguza ya sayari yenye dereva wa SDC101 uliojumuishwa na mawasiliano ya CAN. Imeundwa kwa ajili ya uendeshaji sahihi, kitengo hiki kinatumika kwa voltage ya kawaida ya 24V (kati ya 12-36V), kinatoa nguvu ya 48W, na kinatoa torque ya kawaida ya 1 N·m (torque ya kusimama 3.47 N·m) baada ya kupunguza 10:1. GIM4305-10 ina kiwango cha IP54 na inasaidia encoder ya bit 14 na muunganisho wa encoder tofauti; msaada wa breki maalum upo. Ulinzi wa ndani unajumuisha ulinzi wa joto kupita kiasi, ulinzi wa voltage kupita kiasi na ufuatiliaji wa mzigo kupita kiasi.
Kwa huduma kwa wateja na msaada wa kiufundi wasiliana: [email protected] au tembelea https://rcdrone.top/.
Vipengele Muhimu
- Reducer ya gia ya sayari, uwiano wa 10:1 kwa ajili ya kuongeza torque ya pato na udhibiti wa nafasi.
- Dereva wa SDC101 uliojumuishwa na mawasiliano ya CAN kwa udhibiti wa mtandao.
- Speed ya kawaida baada ya kupunguza 300 RPM, kiwango cha juu 366 RPM.
- Encoder: 14-bit iliyojengwa ndani, inasaidia ingizo la encoder tofauti.
- Envelope ndogo Ø53×26mm na uzito mdogo (140g bila dereva; 150g na dereva).
- Viwango vya mitambo: mzigo wa axial wa juu 125N, mzigo wa radial wa juu 500N, backlash ya gia 15 arcmin.
- Kiwango cha joto kinachofanya kazi -20°C hadi +80°C na kelele ya sauti <60 dB.
- Nyenzo za gia ya kupunguza: ALU au CHUMA. Msaada wa breki wa kawaida upo.
Maelezo ya kiufundi
| Mfano | GIM4305-10 |
| Mfano wa Dereva | SDC101 |
| Voltage ya Kawaida | 24V (12-36V anuwai) |
| Nguvu | 48W |
| Torque ya Kawaida (baada ya kupunguza) | 1 N·m |
| Torque ya Kusimama | 3.47 N·m |
| Speed ya Kawaida (baada ya kupunguza) | 300 RPM |
| Speed ya Juu (baada ya kupunguza) | 366 RPM |
| Current ya Kawaida | 2A |
| Current ya Kusimama | 5.6A |
| Upinzani wa Awamu | 1.15 Ω |
| Inductance ya Awamu | 0.41 mH |
| Constant ya Speed | 15.25 rpm/v |
| Constant ya Torque | 0.62 N·m/A |
| Idadi ya Jozi za Mipira | 14 Jozi |
| Uwiano wa Gear | 10:1 |
| Aina ya Gear | Planetary |
| Nyenzo za Gear ya Reducer | ALU au CHUMA |
| Backlash ya Gear ya Reducer | 15 arcmin |
| Uzito wa Motor (bila Dereva) | 140 g |
| Uzito wa Motor (na Dereva) | 150 g |
| Ukubwa (bila Dereva) | Ø53×26 mm |
| Ukubwa (na Dereva) | Ø53×26 mm |
| Mzigo wa Axial wa Juu | 125 N |
| Mzigo wa Radial wa Juu | 500 N |
| Kelele | <60 dB |
| Mawasiliano | CAN |
| Encoder ya Pili | HAPANA |
| Daraja la Ulinzi | IP54 |
| Joto la Kufanya Kazi | -20°C hadi +80°C |
| Azimio la Encoder | 14 Bit |
| Usaidizi wa Encoder Mbalimbali | NDIYO |
| Usaidizi wa Breki Maalum | NDIYO |
Matumizi
- Roboti za kibinadamu na viungo vya roboti
- Vikono vya roboti na moduli za uendeshaji
- Exoskeletons na vifaa vya kusaidia vinavyovaa
- Roboti za mguu nne na viungo vya miguu
- Moduli za kuendesha AGV na roboti za kubebea
- Miradi ya roboti ya chanzo wazi (e.g., Uunganisho wa Pupper V3)
Maelekezo
- Diagramu ya Usanidi ya GIM4305-10SHS (PDF)
- Diagramu ya Mwandiko wa Interface ya GIM4305 (PDF)
- SteadyWin_GIM4305_10.stp
Maelezo
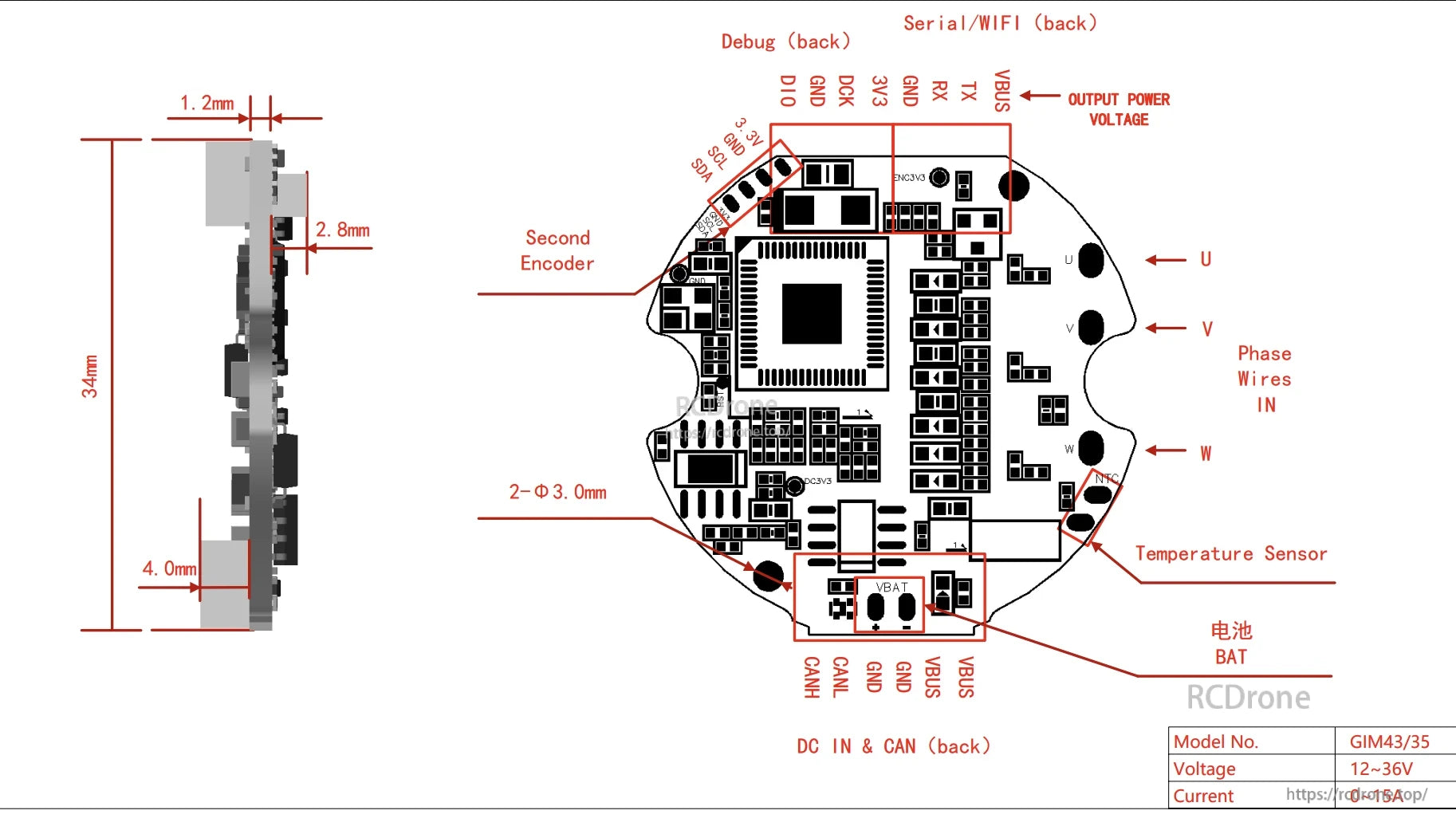
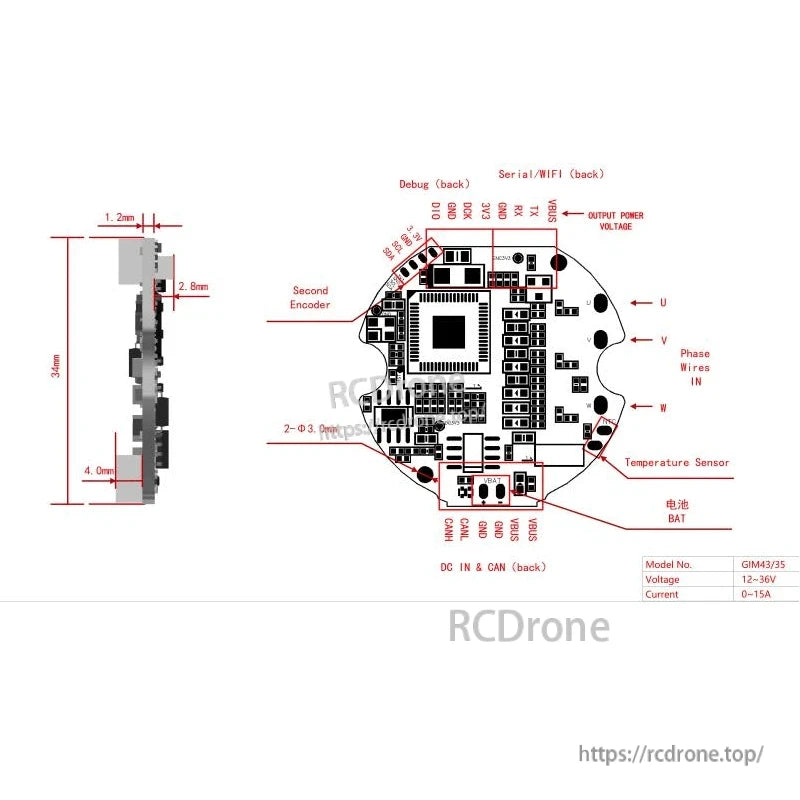
SteadyWin Mchoro wa PCB wa motor GIM43/35 unaonyesha uhusiano, vipimo, na vipengele—encoders, nyaya za awamu, sensor ya joto, ingizo la betri, bandari za debug—zinazoendesha kwa 12–36V na 0–15A sasa.
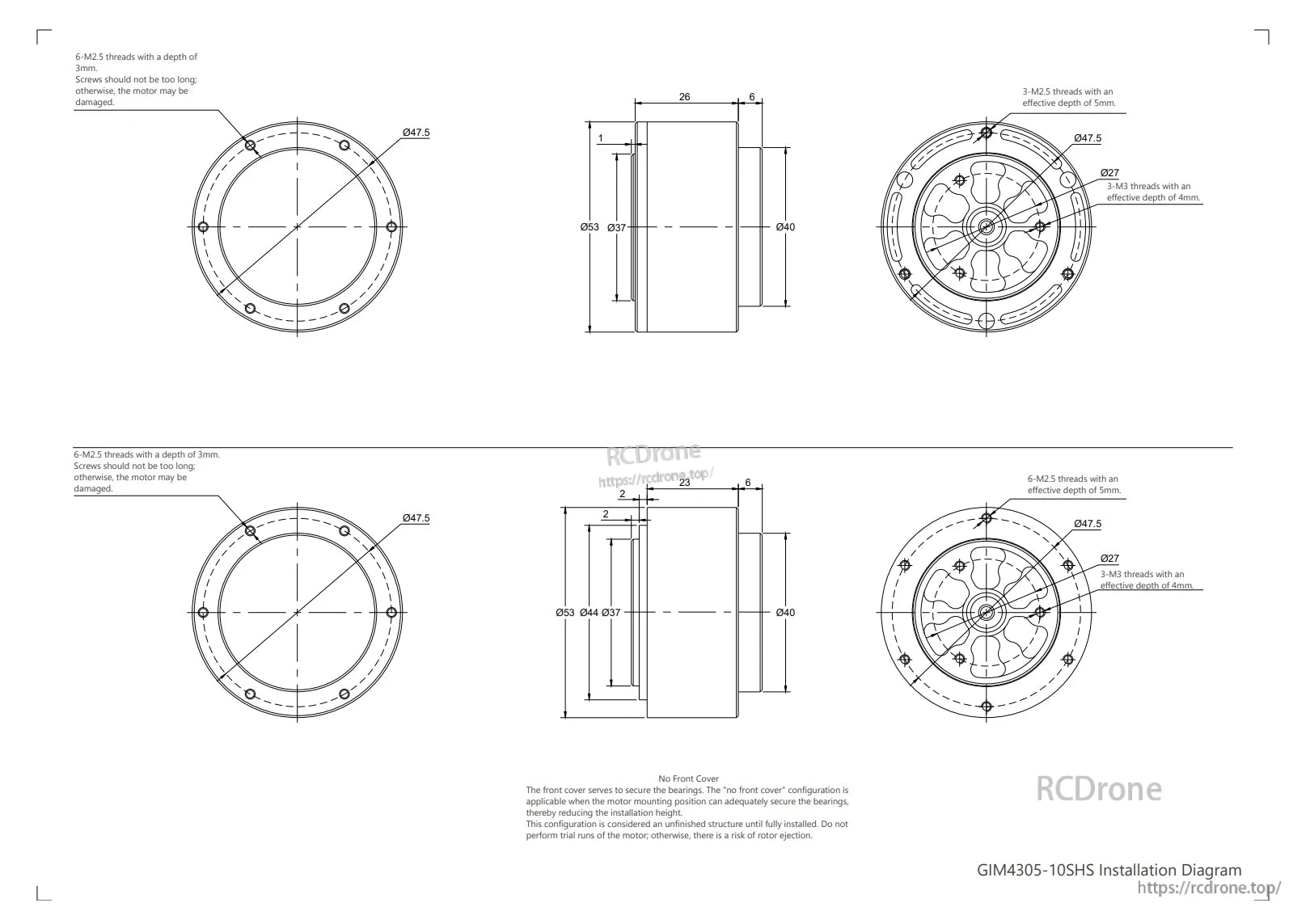
Diagramu ya kiufundi ya usanikishaji wa motor GIM4305-10SHS inaonyesha vipimo, spesifikesheni za nyuzi, onyo za urefu wa screw ili kuzuia uharibifu, na usanidi na bila kifuniko cha mbele.
Related Collections