





SteadyWin PM100 Motor 24V 1.6N·m 130RPM (290RPM Max) Aina ya Encoder AS5048A/AS5600
SteadyWin PM100 Motor 24V 1.6N·m 130RPM (290RPM Max) Aina ya Encoder AS5048A/AS5600
SteadyWin
Regular price
$117.00 USD
Regular price
Sale price
$117.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
Motor ya SteadyWin PM100 ni motor ya 24V iliyoundwa kwa ajili ya matumizi ya kuendesha roboti na viungo. Ina torque ya kawaida ya 1.6N·m kwa 130RPM, ikiwa na kasi ya juu ya 290RPM, na inasaidia aina za encoder AS5048A/AS5600.
Matumizi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons
- Roboti za mguu nne
- Magari ya AGV
- Roboti za ARU
Maelezo ya Kiufundi
| Mfano | PM100 |
| Voltage ya Kawaida | 24V |
| Torque ya Kawaida | 1.6N·m |
| Kasi ya Kawaida | 130RPM |
| Kasi ya Juu | 290RPM |
| Current ya Kawaida | 1.75A |
| Torque ya kusimama | 2N·m |
| Current ya kusimama | 3A |
| Zamu za winding za motor | 30T |
| Upinzani wa awamu | 3Ω |
| Inductance ya awamu | 31.5Mh |
| Kasi ya kudumu | 11rpm/v |
| Torque ya kudumu | 1.13N.M/A |
| Inertia ya rotor | 2860gcm^2 |
| Idadi ya jozi za nguzo | 21Jozi |
| Uzito wa motor bila encoder | 454g |
| Uzito wa motor na encoder | 460g |
| Joto la juu la kutengua magneti | 120°C |
| Joto la Kazi | 20~80°C |
| Aina ya encoder | AS5048A/AS5600 |
Vipimo vya Kihandisi / Kuweka
| Upeo wa nje | Ø98.5 ±0.05 |
| Upeo wa hatua | Ø34.8 |
| Mpangilio wa mashimo A | 6-M3 kwenye Ø28. |
| Mpangilio wa mashimo B | 4-M3 kwenye Ø65 |
| Mpangilio wa mashimo C | 2-M3 |
| Mpangilio wa mashimo D | 8-M2.5 kwenye Ø47 |
| Kipimo cha rejea | 36.5 ±0.2 |
| Vipimo vya rejea | 28.5; 24.8; 38.1; 14; 5; 2; 1 |
| Toleo la kebo ya nguvu | Imewekwa kwenye mchoro |
Kwa msaada wa uchaguzi au msaada wa uunganisho, wasiliana na https://rcdrone.top/ au barua pepe [email protected].
Hati
PM100_installation_diagram.pdf
Maelezo
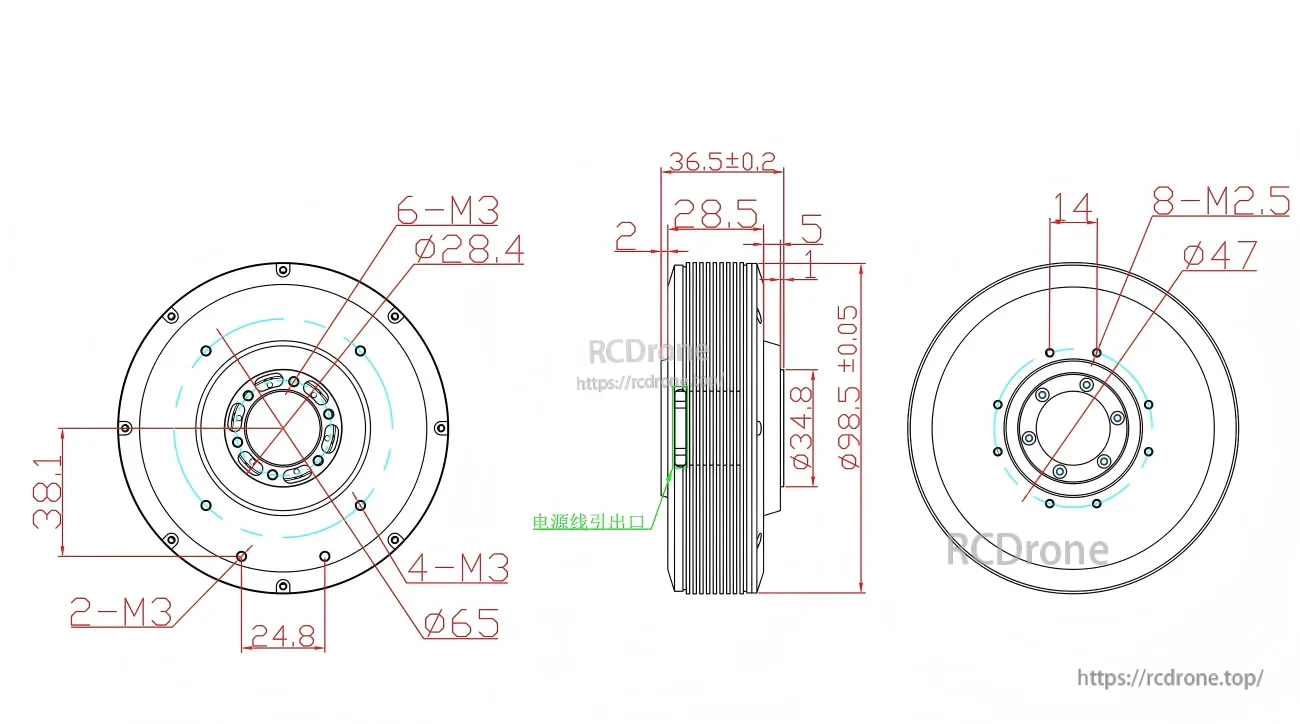
Vipimo vya usakinishaji na nafasi husaidia kuthibitisha ufanisi, ikiwa ni pamoja na Ø98.5 mm kipenyo cha nje na mifumo ya kawaida ya bolt-circle.
Related Collections





