STM32 Open Source Quadcopter DIY Kit - Laser Optical Flow Student Student Board PCB + PID Debugging Rack
STM32 Open Source Quadcopter DIY Kit - Laser Optical Flow Student Student Board PCB + PID Debugging Rack
RCDrone
Couldn't load pickup availability
Muhtasari
The STM32 DIY Seti Huria ya Quadcopter ya Chanzo Huria ni suluhisho la kina kwa wanafunzi, wapenda hobby, na wasanidi programu ambao wanataka uzoefu wa vitendo ndani programu ya drone, mienendo ya ndege, na ukuzaji wa maunzi. Akishirikiana na Mdhibiti mdogo wa STM32F103C8T6, MPU6050 gyroscope ya mhimili 6, na Sehemu ya NRF24L01, quadcopter hii ina teknolojia ya kisasa ya kukimbia kwa utulivu na utulivu. Yake uimarishaji wa mtiririko wa macho pamoja na sensorer shinikizo la barometriki inahakikisha kushikilia kwa urefu sahihi na kufunga nafasi, wakati programu huria ya C inaruhusu watumiaji kurekebisha kanuni za safari za ndege. Na bandari za IO zinazoweza kubinafsishwa, urekebishaji wa kigezo cha PID kisicho na waya, na msaada kwa maendeleo ya sekondari kwa kutumia Keil MDK5, quadcopter hii inatoa utengamano usio na kifani kwa wanaoanza na watumiaji wa hali ya juu. Mwenye nguvu Betri ya 3.7V 1200mAh inahakikisha hadi dakika 10 za wakati wa kukimbia, na uzani mwepesi fremu ya 320mm x 230mm imeundwa kwa ajili ya utulivu na kubebeka. Rafu iliyojumuishwa ya utatuzi wa PID huongeza zaidi uzoefu wa kujifunza, na kufanya kifaa hiki kuwa bora kwa miradi ya elimu, mashindano, na wapenda drone.
Sifa Muhimu
-
Usahihi wa Udhibiti wa Ndege:
- Vifaa na Mdhibiti mdogo wa STM32F103C8T6 na Gyroscope ya MPU6050 kwa mienendo ya kuaminika ya ndege.
- Moduli ya mtiririko wa macho (PMW3901) na kihisi cha barometriki (SPL06-001) wezesha kushikilia kwa usahihi nafasi na uimarishaji wa mwinuko (20cm-400cm).
-
Chanzo Huria na Uwezeshaji:
- Firmware ya chanzo huria imeandikwa ndani kiwango C kwa maendeleo rahisi ya sekondari.
- Sambamba na Keil MDK5 mazingira kwa ajili ya miradi ya juu ya programu.
-
Udhibiti wa Waya:
- Vipengele vya a Sehemu ya NRF24L01 kusaidia umbali wa udhibiti wa 50m+ katika mazingira ya wazi.
- Bila waya Marekebisho ya kigezo cha PID kwa X, Y, Z shoka hurahisisha uboreshaji wa safari za ndege.
-
Ubunifu wa Kifaa Imara:
- Fremu ya kudumu na 8520 motors brushed na 13.5 cm propellers kwa ndege thabiti za ndani na nje.
- Ubunifu mwepesi (100g pamoja na betri) inasaidia upakiaji hadi 60g, kuifanya kufaa kwa kuongeza vitambuzi au kamera.
-
Zana za Kujifunza zilizoboreshwa:
- Inajumuisha a Rati ya kurekebisha PID kwa kurekebisha vizuri vigezo vya PID.
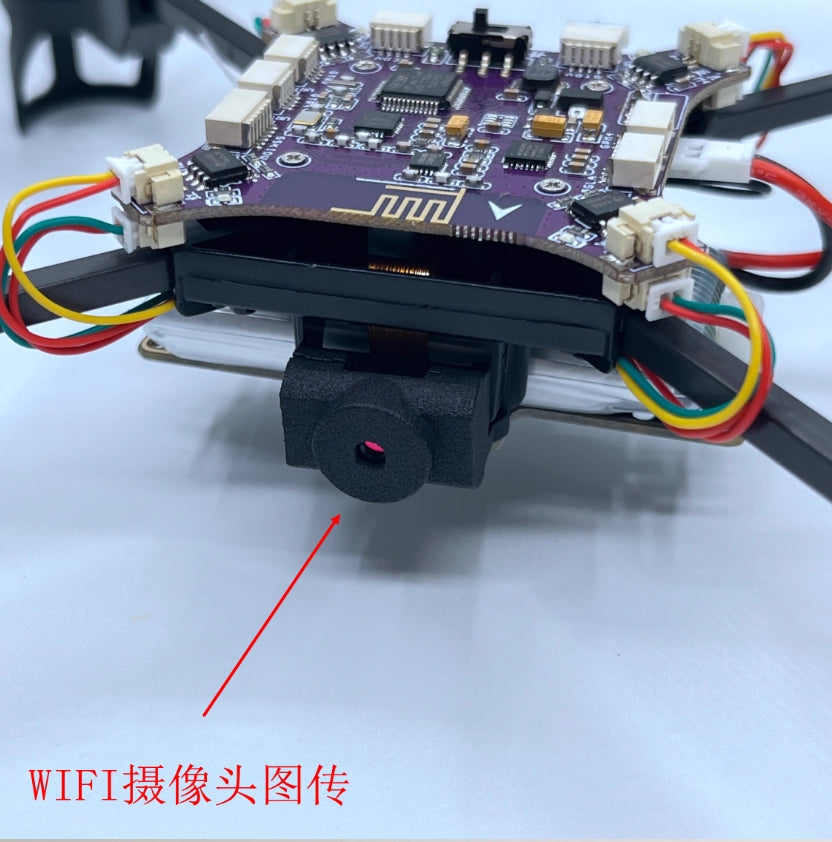
- Bandari za IO zilizouzwa mapema zinaauni viendelezi kama vile Miingiliano ya kamera ya Wi-Fi, SPI, UART, na Sehemu za IIC.
-
Mfumo wa Betri yenye Nguvu:
- Inajumuisha 3.7V 380mAh na Betri za 3.7V 1200mAh, kutoa muda wa ndege wa Dakika 5 hadi 10 kulingana na mzigo na masharti.
- Ulinzi uliojengewa ndani dhidi ya kuchaji na kutoa chaji kupita kiasi huhakikisha usalama wa betri.
-
Muunganisho wa Plug-and-Play:
- Muunganisho wa USB HID kwa uhamishaji wa data wa wakati halisi na marekebisho ya parameta kupitia kiolesura cha kompyuta.
- Rahisi kutumia kiolesura cha programu cha SWD kinachosaidia zote mbili J-Kiungo na Kiungo cha ST watatuzi.
Vipimo vya Kiufundi
Quadcopter
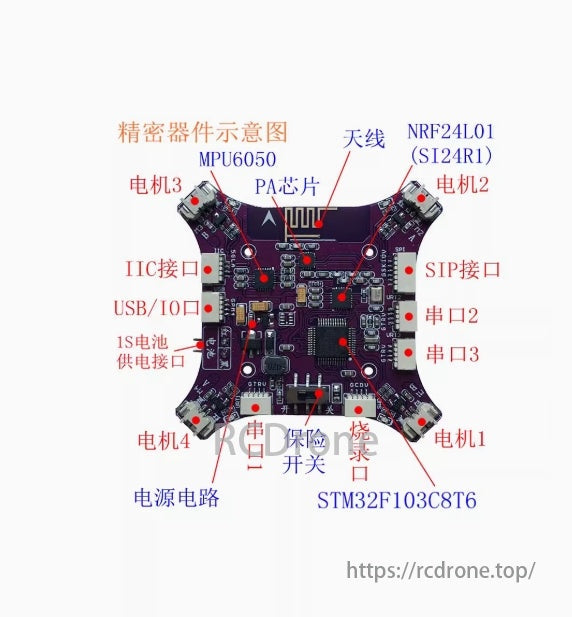
- Chip kuu: STM32F103C8T6
- Gyroscope: MPU6050 (mhimili 6)
- Moduli Isiyo na Waya: NRF24L01 (SI24R1)
- Dereva wa magari: AO3400 (A09T)
- Magari: 8520 motors brushed
- Propela: 13.5cm (4 pamoja)
- Sensorer: SPL06-001 (barometer), PMW3901 (mtiririko wa macho)
- Betri: 3.7V 1200mAh (ndege ya dak 10) + 3.7V 380mAh (ndege ya dakika 5)
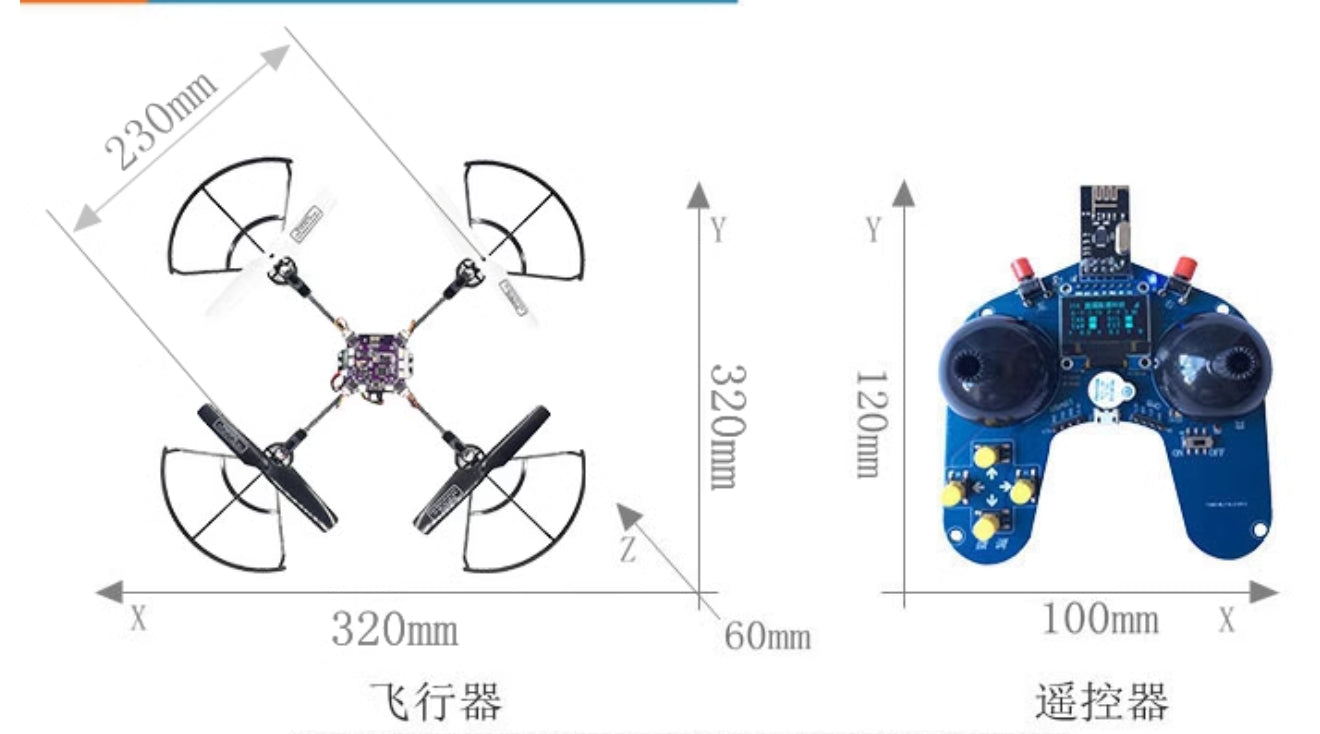
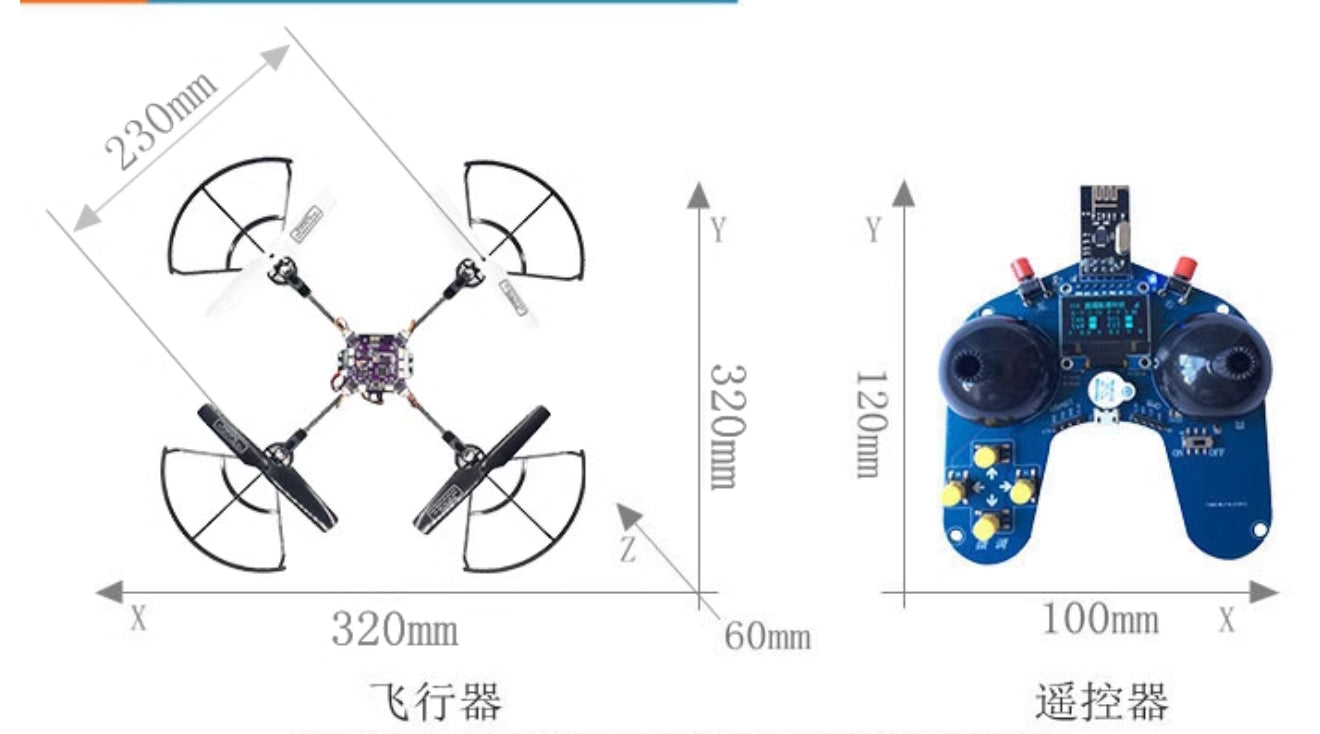
- Uzito: 100g (pamoja na betri)
- Ukubwa wa Fremu: 320mm x 230mm
- Bandari za Ziada: SPI x1, UART x2, IIC x1, USB IO x1
- Uwezo wa Kupakia: 60g
Kidhibiti cha Mbali
- Chip kuu: STM32F103C8T6
- Moduli Isiyo na Waya: NRF24L01 (SI24R1)
- Onyesha: OLED ya inchi 0.96
- Nguvu: Betri ya 3.7V 380mAh
- Umbali wa Kudhibiti: > 50m (uwanja wazi)
- Ukubwa: 12cm x 10cm
- Uzito: 60g
- Vipengele vya Ziada: Vifungo vya urekebishaji, kiolesura cha kurekebisha PID
Yaliyomo kwenye Kifurushi
- Fremu ya Quadcopter yenye Elektroniki Zilizounganishwa Awali (Kidhibiti cha ndege kinachotegemea STM32F103C8T6, MPU6050, SPL06-001, PMW3901)
- Kidhibiti cha Mbali kisicho na waya cha STM32 (pamoja na onyesho la OLED na moduli ya NRF24L01).
- Betri:
- 3.7V 1200mAh Betri ya Lithium x1 (muda wa ndege wa dakika 10)
- 3.7V 380mAh Betri ya Lithium x1 (muda wa ndege wa dakika 5)
- Vipuri vya Propela (pcs 4)
- Kebo ya Kuchaji ya USB (3.7V–4.2V inaoana)
- Waya za kuruka (ya aina mbalimbali)
- Screwdriver ya Usahihi
- Rack ya Utatuzi wa PID
- Mwongozo wa Kina wa Mtumiaji na Mafunzo (PDF na video).
Vipengele vya Ziada Vimeangaziwa
- Uwekaji wa Sehemu Sahihi: Kila sehemu iliyouzwa imewekwa alama, ikijumuisha bandari za nishati, SPI, IIC, USB na viunganishi vya gari.
- Zana za Utatuzi wa Msimu: Mtiririko wa macho na uwekaji wa vitambuzi vya balometriki huhakikisha data sahihi ya safari ya ndege kwa ajili ya marekebisho ya PID.
- Viendelezi vya Bodi ya Maendeleo: Inaruhusu kuunganishwa kwa kamera na vitambuzi kwa upigaji picha wa angani na kurekodi video.
- Kiolesura Kinachoonekana: Data ya Quadcopter inayoonyeshwa katika muda halisi kupitia programu ya Kompyuta kwa utatuzi na uboreshaji.
Maombi:
- Matumizi ya Kielimu: Ni kamili kwa miradi ya kujifunza ya STEM na kozi za uhandisi.
- Mashindano: Bora kwa Ndege isiyo na rubani ya DIY changamoto na mashindano ya roboti.
- Wanahobbyists: Mradi unaovutia kwa wapenda teknolojia na waundaji.
- Maendeleo ya Juu: Inaauni usanidi wa pili kwa programu maalum.
Notisi ya Usalama:
Hakikisha hali salama za majaribio kwa kutumia rack iliyojumuishwa ya utatuzi. Epuka kuruka katika maeneo yenye watu wengi au hatari. Fuata maagizo ya mkusanyiko na ushughulikie vipengele vilivyouzwa kwa uangalifu.
Pamoja na muundo wake wa kawaida, kubadilika kwa chanzo huria, na nyenzo nyingi za kujifunza, Kifurushi cha STM32 DIY Open Source Quadcopter ndio lango lako la kufahamu teknolojia na upangaji programu.




Huu ni mkusanyiko wa bodi ya PCB kwa mifumo ya televisheni yenye chipu STM3ZF103C8T6F, iliyoundwa kwa ajili ya upitishaji na upokeaji wa video wa ubora wa juu.


OnF STM32F Blue Pill, 7% i: STM32 High Frequency BRB+, 10 Ohm x 7 HhJfV: STM32 Remote Control. Onyesho: Inchi 0.96 OLED IM Et: 2.4C IMHM: ~20°C hadi ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12cm x 6cm InLaR: 3.7V, 380mAh, Uzito: 60g
Related Collections