SU17 Utafiti Drone - PX4 Open Source Industrial Development Development With MID-360 LiDAR, Quad-Camera SLAM,EGO-Swarm
SU17 Utafiti Drone - PX4 Open Source Industrial Development Development With MID-360 LiDAR, Quad-Camera SLAM,EGO-Swarm
RCDrone
Couldn't load pickup availability
Muhtasari
Drone ya Utafiti ya SU17 ni quadcopter ya utendaji wa juu iliyo na a Betri ya 6000mAh, MID-360 LiDAR kwa ramani ya 3D, mfumo wa SLAM wa kamera nne kwa ujanibishaji sahihi, na kuunganishwa GPS+GLONASS nafasi. Kwa uzito wa takeoff 2.3 kg na a uwezo wa kupakia 200 g, inatoa Dakika 21 za muda wa ndege katika hali ya mkao wa kuona. Inaendeshwa na programu ya Prometheus, inasaidia utambuzi wa lengo, upangaji wa njia, na urambazaji wa uhuru, na kuifanya kuwa sekta ya daraja suluhisho la utafiti na uvumbuzi.
Vigezo vya Vifaa
Ndege
| Kigezo | Maelezo |
|---|---|
| Aina ya Ndege | Quadcopter |
| Uzito wa Kuondoka (Takriban.) | Kilo 2.3 (yenye kifuniko cha kinga na betri) |
| Umbali wa Ulalo | 320 mm |
| Vipimo | Urefu: 442 mm, Upana: 388 mm, Urefu: 174 mm (bila kujumuisha kifuniko cha kinga) |
| Upeo wa Upakiaji | 200 g |
| Wakati wa Ndege wa Kuelea | Takriban. Dakika 13 (na kuelea kwa 100%, sio chini ya 0%), nafasi ya kuona: dakika 21 |
| Usahihi wa Kuelea | GPS: Wima ±1.5 m, Mlalo ±2.0 m |
| 3D LiDAR SLAM: Wima ±0.08 m, Mlalo ±0.08 m | |
| SLAM inayoonekana ya kamera 4: Wima ±0.05 m, Mlalo ±0.05 m | |
| Kiwango cha Upinzani wa Upepo | Kiwango cha 4 |
| Joto la Uendeshaji | -10°C hadi 40°C |
| Chip kuu ya MCU | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometer | MS5611 |
| Dira | QMC5883L |
| Kiolesura | USB Type-C |
Kompyuta ya Onboard
| Kigezo | Maelezo |
|---|---|
| Kichakataji | Intel Core i5-8365U |
| Uwezo wa Kumbukumbu | 8GB |
| Mzunguko wa Kumbukumbu | LPDDR3@2133MHz |
| Hifadhi | 256GB NVMe SSD |
| Bandari ya Mtandao | Baidu Apollo Ethernet X2, 12V@3A power ugavi, inasaidia IEEE 1588-2008 (PTP v2) |
| Bandari ya Serial | TTL Serial Port X2, 5V/3.3V@500mA power ugavi |
| USB | Aina-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Betri ya Nguvu
| Kigezo | Maelezo |
|---|---|
| Mfano | SU17-L |
| Aina ya Betri | Betri ya polima ya lithiamu yenye shinikizo la juu |
| Iliyopimwa Voltage | 26.4V (Upeo), 21V (Dakika) |
| Voltage ya Uhifadhi | 22.8V (Kawaida) |
| Uwezo uliokadiriwa | 6000mAh |
| Uzito | 680 g |
| Vipimo | Urefu: 85.2 mm, Upana: 86.5 mm, Urefu: 135 mm |
Kidhibiti cha Mbali
| Kigezo | Maelezo |
|---|---|
| Mfano | QE-2 |
| Vituo | 8 |
| Nguvu ya Usambazaji | 18 ~ 20 dBm |
| Uzito | 294.1 g |
Gimbal
| Kigezo | Maelezo |
|---|---|
| Pembe inayoweza kudhibitiwa | -90° ~ 30° (Mhimili Unaoinamisha) |
| Itifaki ya Utiririshaji | RTSP (Kawaida) |
| Umbizo la Usimbaji | H.264 |
| Azimio | 1080P @ 25fps |
| FOV ya Ulalo (D) | 120° |
| FOV Wima (V) | 54° |
| FOV ya Mlalo (H) | 95° |
Usambazaji wa Picha
| Kigezo | Maelezo |
|---|---|
| Masafa ya Uendeshaji | GHz 2.4 |
| Nguvu ya Usambazaji | 18dBm |
| Safu ya Mawasiliano | 3Km (Hakuna Kuingilia, Hakuna Kizuizi) |
| Msururu wa Picha | 1Km (Uingiliaji mdogo, Hakuna Kikwazo) |
| Upeo Bandwidth | 40Mbps |
Kamera ya Kina cha Nne
| Kigezo | Maelezo |
|---|---|
| Kiongeza kasi cha Maono | Intel Movidius Myriad X VPU |
| Upeo wa Azimio | 1296x816 |
| Kiwango cha Juu cha Kiwango cha Fremu | 1280x800 @ 120fps |
| Aina ya Shutter | Shutter ya Ulimwenguni |
| Umbizo la Usimbaji | Mtiririko Mmoja wa 8/10-bit |
| FOV | 150° Diagonal FOV, 127.4° Mlalo FOV, 79.7° Wima FOV |
| Idadi ya Sensorer | 4 (2 Mbele + 2 Nyuma) |
| IMU | BMI270 |
GNSS
| Kigezo | Maelezo |
|---|---|
| Usahihi wa Mlalo | 1.5 m CEP (pamoja na SBAS) |
| Usahihi wa Kasi | 0.05 m/s |
| Hali ya Uendeshaji | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Chaja
| Kigezo | Maelezo |
|---|---|
| Mfano | LK150-2640500 |
| Voltage ya Kuingiza ya AC | 100V ~ 240V |
| Voltage ya Kuingiza ya DC | 26.4V |
| Uzito | 460 g |
| Inachaji ya Sasa | 5A |
3D LiDAR
| Kigezo | Maelezo |
|---|---|
| Mfano | MID-360 |
| Laser Wavelength | 905 nm |
| Safu ya Kipimo | 40 m @ 10% Uakisi |
| FOV | Mlalo 360°, Wima -7° ~ 52° |
| Kiwango cha chini cha Masafa | 0.1 m |
| Mzunguko wa Pointi | 10 Hz (Kawaida) |
| Pato la Pointi | pointi 200,000 kwa sekunde |
| Data Interface | 100 BASE-TX Ethernet |
| Usawazishaji wa Data | IEEE 1588-2008 (PTP v2), GPS |
| IMU iliyojengwa ndani | ICM40609 |
| Voltage ya Ugavi wa Nguvu | 7 ~ 27V |
| Vipimo | 65 mm (W) x 65 mm (D) x 60 mm (H) |
| Uzito | 115 g |
| Joto la Uendeshaji | -20°C ~ 55°C |
Vigezo vya Programu
Kompyuta ya Onboard
| Kigezo | Maelezo |
|---|---|
| Mfano | Intel Core i5-8365U |
| Mfumo | Ubuntu 20.04 |
| Jina la mtumiaji | amov |
| Nenosiri | amov |
| ROS | noetic |
| OpenCV | 4.7.0 |
| Visual Positioning System | BSA_SLAM V1 |
Programu ya Prometheus
| Kigezo | Maelezo |
|---|---|
| Toleo | v2.0 |
| Mfumo wa PrometheusGroundStation | v1.24.11.27 (Toleo la mwisho kulingana na rekodi ya toleo la Wiki) |
Maelezo
Toleo la Utafiti la SU17
Ndege isiyo na rubani ya utafiti wa ubora wa kiwango cha viwanda
- Hiari 3D LiDAR: Huwasha uwekaji ramani, uwekaji nafasi, na uepukaji wa vikwazo vya urambazaji.
- Programu ya Prometheus Autonomous Drone: Tajiri katika demos kwa umilisi wa haraka wa udhibiti wa ndege zisizo na rubani.
- Jukwaa la ndege la daraja la viwanda: Imara na wazi, ikiweka kiwango kipya cha utendaji wa utafiti wa ndege zisizo na rubani.

Sifa Muhimu
Utafiti wa SU17 Jukwaa la Maendeleo la Drone (inayorejelewa kama SU17) inachukua muundo uliojumuishwa, unaojumuisha vidhibiti vya ndege, kompyuta za ndani, moduli za SLAM za kamera nne, kamera za wingu, na moduli za utumaji picha za ujumuishaji wa kiwango cha juu, zinazoimarisha kwa kiasi kikubwa uthabiti na kutegemewa kwa maunzi. Ikiwa na programu ya prometheus inayojiendesha ya drone, SU17 inasaidia vipengele kama vile utambuzi lengwa, ufuatiliaji, na upangaji wa njia kwa ajili ya matukio mbalimbali ya udhibiti wa ndege.
Inajumuisha kwa hiari MID-360 3D LiDAR, pamoja na algoriti ya FAST-LIO ili kufikia 3D LiDAR SLAM, ikitoa taarifa sahihi za kuhisi mazingira na kuweka nafasi. Ikioanishwa na algoriti ya upangaji wa njia ya EGO-Swarm, huwezesha uchoraji wa ramani ya 3D kwa ufanisi na kuepuka vikwazo katika mazingira changamano.




Mfumo wa Programu ya Prometheus V2
Jukwaa la maendeleo limejengwa juu ya mfumo wa chanzo huria wa ROS na Prometheus, unaotoa utendaji mzuri na API za maendeleo ya upili kwa upangaji upya mzuri. Inatoa ufikiaji wa maelezo ya nafasi, njia za ndege, hali ya betri, data ya IMU, na hali ya anga na violesura vingine vya data vya kihisi, pamoja na violesura vya udhibiti vya nafasi, kasi, kasi na mtazamo.
Zaidi ya hayo, inajumuisha mifano ya matumizi ya API zinazohusiana. Zaidi ya hayo, ndege isiyo na rubani ina vipengele vya ukaguzi wa usalama kwa shughuli za ndege (kuzuia ajali), kuwezesha kushuka kiotomatiki chini ya hali isiyo ya kawaida, kupunguza hatari ya ajali na kuhakikisha mchakato wa maendeleo salama.

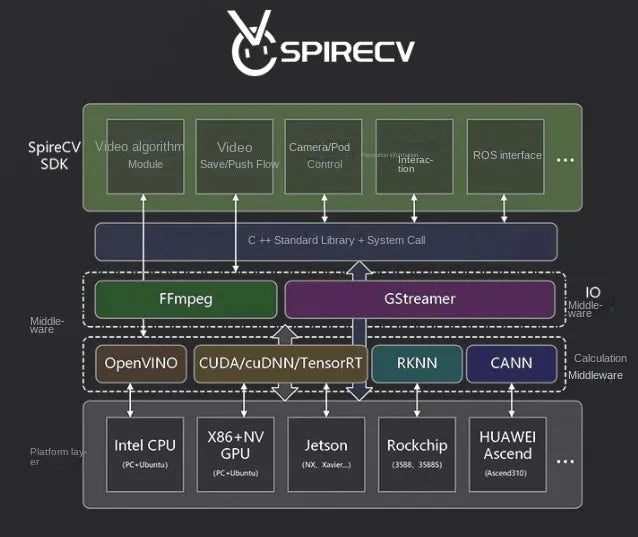
Maktaba ya Maono ya SpireCV
Maktaba ya Maono ya SpireCV ni SDK ya kuchakata picha katika wakati halisi iliyoundwa mahususi kwa mifumo mahiri ya UAV. Inatoa utendaji kazi kama vile udhibiti wa gimbal na kamera, uhifadhi wa video na utiririshaji, utambuzi wa lengo, utambuzi na ufuatiliaji.
SDK hii inalenga kutoa utendakazi wa hali ya juu, kutegemewa, na kiolesura kilichorahisishwa kwa wasanidi wa mifumo mahiri ya UAV. Kwa suluhu ya uchakataji wa taswira iliyo na vipengele vingi, huwezesha wasanidi programu kutekeleza kwa ufanisi programu mbalimbali changamano zenye msingi wa maono.
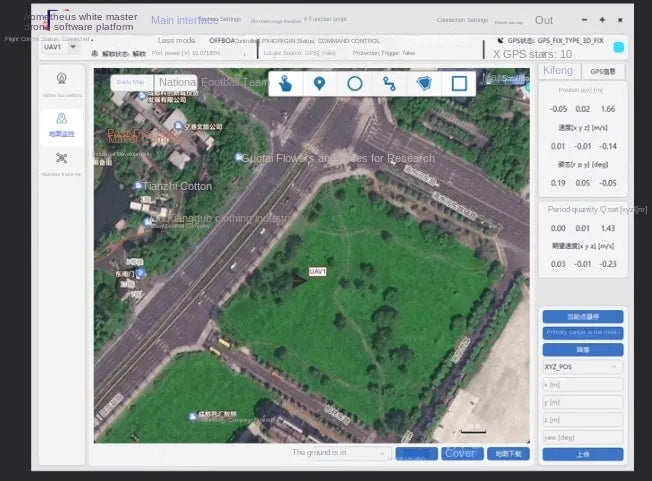
Kituo cha chini cha Prometheus
Prometheus Ground Station ni kiolesura cha mwingiliano wa binadamu na drone iliyotengenezwa kwa msingi wa mfumo wa Prometheus, uliojengwa kwa kutumia teknolojia ya Qt. Inawezesha kurudiwa kwa haraka kwa utendaji wa mfumo wa Prometheus, kutoa ufuatiliaji wa wakati halisi na taswira ya 3D ya hali ya drone na data ya udhibiti.
Kupitia kituo cha ardhini, watumiaji wanaweza kutekeleza amri kama vile kuondoka kwa mbofyo mmoja, kuelea kwenye nafasi ya sasa, kutua na udhibiti wa nafasi. Zaidi ya hayo, mfumo huu unaauni vitufe vya utendaji maalum kwa ajili ya kuanzisha hati zilizofafanuliwa na mtumiaji au kutuma ujumbe maalum, kuboresha kwa kiasi kikubwa urahisishaji, ufanisi na upanuzi wa utendakazi wa mtumiaji.
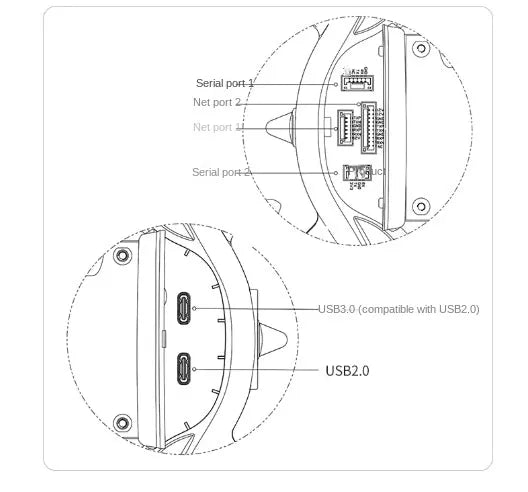
Upanuzi wa Nguvu
Bandari za Upanuzi wa Vifaa
-
Bandari ya Serial 1
-
Bandari ya Serial 2
-
Mlango wa Mtandao 1
-
Mlango wa Mtandao 2
-
Bandari za USB:
- USB 3.0 (Inaoana na USB 2.0)
- USB 2.0
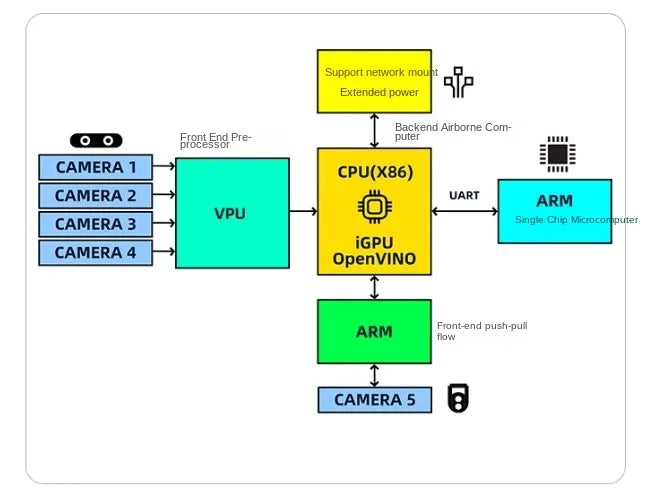
Mfumo wa Vifaa
Picha inaonyesha usanifu wa vifaa vya SU17 drone, ikionyesha ujumuishaji wa vifaa anuwai vya usindikaji wa data wa hali ya juu na udhibiti wa mfumo:
-
Kamera (Kamera 1-4):
Imeunganishwa na a VPU (Kitengo cha Kuchakata Maono) kwa usindikaji wa mwisho wa mbele. -
VPU:
Hushughulikia data inayoonekana kutoka kwa kamera nyingi na kuisambaza kwa vitengo vya uchakataji. -
CPU (X86) na iGPU na OpenVINO:
Hutumika kama kitengo cha msingi cha kukokotoa cha usindikaji wa mazingira nyuma, kusaidia uwezo wa upanuzi uliounganishwa na mtandao kwa ajili ya nishati ya hesabu iliyoimarishwa. -
ARM Single-Chip Microcontroller:
Huingiliana na CPU kupitia kiolesura cha UART kwa vipengele vya ziada vya udhibiti. -
Usambazaji wa Mabomba ya Mbele na Kamera 5:
Inadhibitiwa na kichakataji maalum cha ARM kwa uboreshaji zaidi wa data.
Mfumo huu unajumuisha vitengo vingi vya uchakataji, kusaidia uchanganuzi wa picha wa wakati halisi, kazi za kikokotoo za hali ya juu, na mawasiliano yasiyo na mshono kati ya vipengee vya maunzi. Inahakikisha utunzaji mzuri wa shughuli ngumu katika maombi ya utafiti na maendeleo.
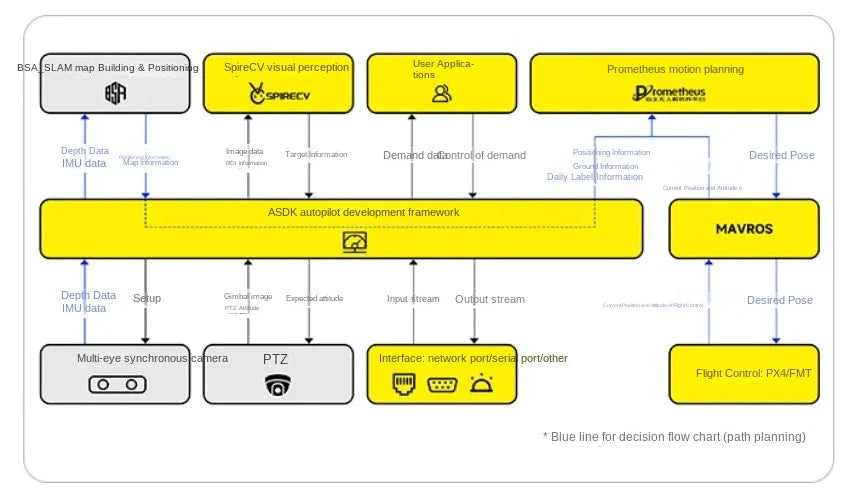
Mfumo wa Programu
Mchoro unaonyesha usanifu wa programu ya SU17 drone, ikionyesha ujumuishaji wa mifumo mbali mbali ya utendakazi wa uhuru:
-
BSA_SLAM (Kuweka ramani na Ujanibishaji):
- Hutoa ramani ya anga na data ya kuweka nafasi.
- Huunganisha kina na pembejeo za kihisi cha IMU kwa utambuzi sahihi wa mazingira.
-
Mtazamo wa Maono ya SpireCV:
- Huchakata data inayoonekana, ikijumuisha utambuzi wa kitu, maelezo ya ROI na ufuatiliaji lengwa.
-
Maombi ya Mtumiaji:
- Violesura vya kazi zinazoendeshwa na mtumiaji kama vile taswira ya data na uingizaji wa amri.
-
Mpango wa Mwendo wa Prometheus:
- Hushughulikia upangaji wa mwelekeo kwa kutumia nafasi, kasi na data lengwa.
-
ASDK Autonomous Driving Framework:
- Hutumika kama safu kuu ya uchakataji, inayodhibiti mtiririko wa data kati ya vitambuzi, kamera, moduli za wingu na violesura vya nje.
- Inaauni njia nyingi za kuingiza/pato (kwa mfano, bandari za mtandao, bandari za mfululizo).
-
MAVROS:
- Huwasiliana na mifumo ya udhibiti wa safari za ndege (PX4/FMT) kwa hali ya angani na udhibiti wa nafasi.
-
Wingu Module na Multi-Sync Kamera:
- Huunganisha data inayotokana na wingu kwa uchakataji wa hali ya juu.
- Husawazisha pembejeo za kuona kwa utendakazi wa usahihi wa juu.
Mistari ya Bluu: Wakilisha njia za kufanya maamuzi kwa upangaji wa njia.
Usanifu huu unaonyesha muundo wa kawaida, unaoweza kupanuka, unaowezesha mawasiliano isiyo na mshono kati ya maunzi na vipengee vya programu kwa operesheni thabiti ya drone.
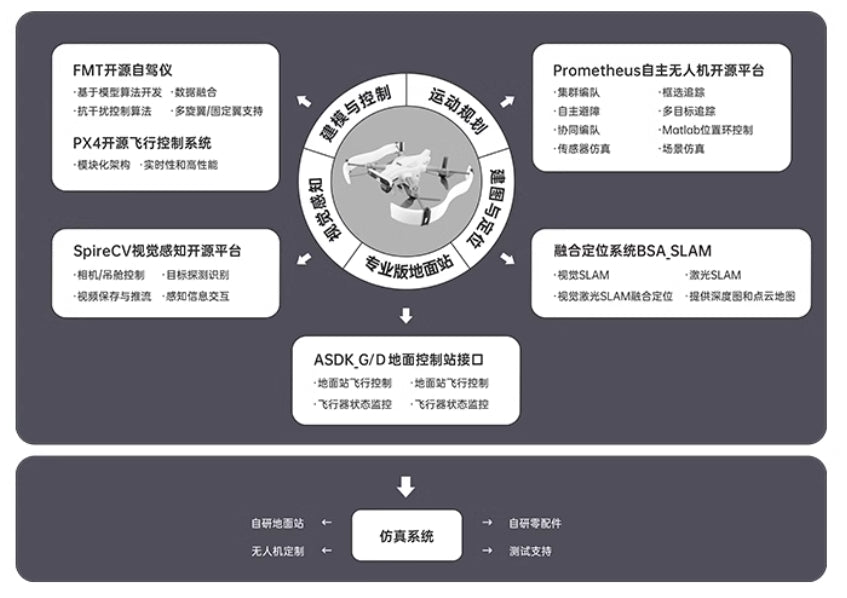
Uwazi wa Akili: Suluhisho la Mfumo wa UAV uliojumuishwa
Mchoro unaonyesha usanifu wa kina na wazi kwa mifumo ya drone, ikisisitiza ustadi na ujumuishaji katika sehemu mbali mbali:
-
Vipengele vya Msingi:
- FMT Open-source Autopilot: Hutoa udhibiti wa kuaminika wa ndege kulingana na maendeleo ya msimu, kusaidia mazingira mbalimbali na ushirikiano wa data.
- Mfumo wa Udhibiti wa Ndege wa PX4: Inahakikisha uthabiti na inasaidia ubinafsishaji wa hali ya juu wa msimu.
- Jukwaa la Mtazamo wa Maono ya SpireCV: Huangazia uchakataji wa picha, ikijumuisha utambuzi wa kitu, ufuatiliaji na utiririshaji wa video katika wakati halisi.
-
Mifumo Muhimu:
- Jukwaa la UAV la Prometheus Autonomous: Inajumuisha udhibiti wa ndege zisizo na rubani nyingi, upangaji mwendo, usogezaji kwa kushirikiana, na uigaji wa ulimwengu halisi.
- Mfumo wa BSA_SLAM: Inachanganya SLAM inayotegemea maono na SLAM inayotegemea LiDAR kwa kuweka nafasi na ramani kwa usahihi.
- ASDK G/D Kiolesura cha Kudhibiti Stesheni ya Chini: Huwasha mawasiliano kati ya vituo vya chini na UAV kwa ufuatiliaji na marekebisho ya wakati halisi.
-
Ujumuishaji wa mtiririko wa kazi:
- Huangazia michakato kama vile kupanga mwendo, ramani ya mazingira, na urambazaji unaojiendesha.
- Kuunganishwa na vituo vya kitaalamu vya udhibiti wa trajectory, kuepuka vikwazo, na usimamizi wa data wa wakati halisi.
-
Usaidizi wa Kuiga:
- Inajumuisha mfumo wa uigaji wa majaribio ya dhamira huru, udhibiti wa UAV na uthibitishaji wa sehemu.
Mfumo huu unaonyesha suluhisho la kisasa kwa ukuzaji wa UAV huru, na uwezo mkubwa wa utafiti, matumizi, na majaribio katika hali tofauti.
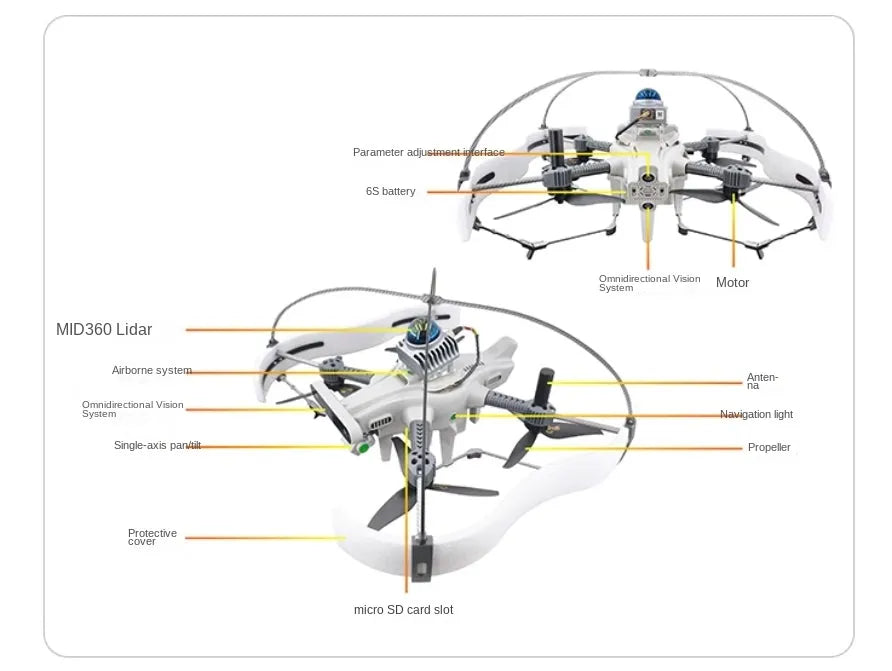
vipengele vya kimuundo vya ndege isiyo na rubani ya SU17, ikisisitiza uthabiti wake na muundo wa hali ya juu. Vipengele muhimu ni pamoja na MID360 LiDAR kwa ramani sahihi, a mfumo wa maono ya pande zote kwa mtazamo mpana wa mazingira, a gimbal ya mhimili mmoja kwa taswira iliyoimarishwa, na uimara Betri ya 6S kwa nguvu iliyopanuliwa. Vipengele vingine muhimu ni pamoja na mfumo wa propeller, antena, taa za urambazaji, na a yanayopangwa kadi ndogo ya SD kwa uhifadhi wa data. Ubunifu huo unajumuisha vifaa vya hali ya juu, kuhakikisha kuegemea na utendaji wa juu kwa matumizi anuwai ya utafiti.