



TI5 Robot CRA-RI40-52-Pro-XX Jumuishi la pamoja la Robot, Hifadhi ya Harmonic, 7 N · M, 24-48 V, Can/Ethercat, IP65, Hollow-Shaft, Single/Dual Encoder (Chaguo la Brake)
TI5 Robot CRA-RI40-52-Pro-XX Jumuishi la pamoja la Robot, Hifadhi ya Harmonic, 7 N · M, 24-48 V, Can/Ethercat, IP65, Hollow-Shaft, Single/Dual Encoder (Chaguo la Brake)
Ti5 Robot
Couldn't load pickup availability
Muhtasari
Roboti ya Ti5 CRA-RI40-52-PRO-XX ni moduli iliyounganishwa, iliyounganishwa iliyounganishwa inayochanganya motor ya torque isiyo na fremu, kipunguza sauti cha usahihi, kiendesha servo na encoder ya sumaku katika kitengo kimoja cha IP65. Ikiwa na usambazaji wa DC wa 24–48 na nguvu iliyokadiriwa ya 90 W, hutoa torati iliyokadiriwa ya N·m 7 na kasi ya pato iliyokadiriwa 80 rpm kwa roboti za humanoid, mifupa ya mifupa, mikono shirikishi, gimbal, AGV na programu zingine za hali ya juu. Shimo la kati la kupitisha linaunga mkono uelekezaji wa kebo; usanidi wa encoder moja au mbili na chaguo la kushikilia-breki zinapatikana. Mawasiliano ni CAN kwa chaguomsingi, na EtherCAT inaweza kuchaguliwa.
Sifa Muhimu
-
Injini iliyojumuishwa + endesha + kipunguza sauti + kisimbaji (sumaku)
-
Ilipimwa torque 7 N · m; lilipimwa kasi ya pato 80 rpm; Nguvu ya 90 W
-
Viwango viwili vya kupunguza: 51:1 au 101:1
-
Usahihi wa hali ya juu: kisimbaji cha biti-17, nyuma nyuma 40 arcsec (51)/30 arcsec (101)
-
Kelele ya chini, cogging ya chini; muundo wa wiani wa juu wa torque
-
ulinzi wa IP65; joto la chini kwa hiari & ubinafsishaji wa kuzuia maji
-
Basi la mawasiliano: CAN (ya kawaida) au EtherCAT (si lazima)
-
Chaguo za kisimbaji kimoja/mbili; matoleo ya breki au yasiyo ya breki
-
Kupitia shimo kwa wiring: 12 mm (kiwango)/11 mm (akaumega)
-
Matumizi ya kawaida: humanoids, cobot joints, exoskeletons, pan-tilts, vifaa vya viwandani, roboti za ukaguzi wa nguvu, mifumo ya baharini/magari.
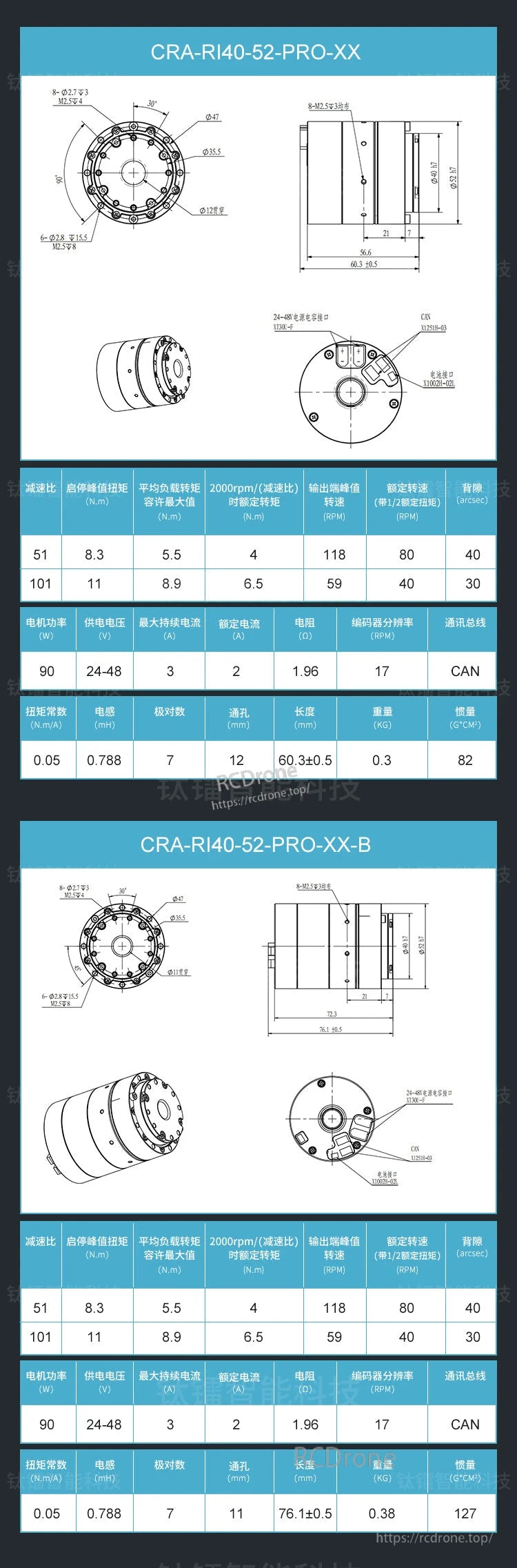
Utendaji kwa Uwiano wa Gia
| Kipengee | 51:1 | 101:1 |
|---|---|---|
| Anza/simamisha torati ya kilele (N·m) | 8.3 | 11 |
| Max. wastani unaoruhusiwa. torati ya upakiaji (N·m) | 5.5 | 8.9 |
| Torque iliyokadiriwa @ 2000 rpm/(uwiano) (N·m) | 4 | 6.5 |
| Kasi ya kilele cha pato (rpm) | 118 | 59 |
| Kasi iliyokadiriwa @ ½ torque iliyokadiriwa (rpm) | 80 | 80 |
| Kurudi nyuma (arcsec) | 40 | 30 |
Vigezo vya Umeme
-
Ugavi wa voltage: 24–48 V DC
-
Ukadiriaji/mkondo unaoendelea: 2 A (Upeo usiozidi 3 A)
-
Upinzani wa awamu: 1.96 Ω
-
Inductance: 0.788 mH
-
Torque mara kwa mara: 0.05 N·m/A
-
Jozi za pole: 7
-
Ubora wa kisimbaji: 17-bit (sumaku)
Mitambo & Kiolesura
-
Kiwango cha ulinzi: IP65
-
Ukadiriaji wa kasi ya pato: 80 rpm
-
Mawasiliano: INAWEZA (chaguo-msingi)/EtherCAT (chaguo)
-
Shimo la kupitisha (kwa wiring): Ø12 mm (kawaida)/Ø11 mm (na breki)
-
Urefu & hali (hakuna breki): 60.3 ± 0.5 mm, 82 g·cm²
-
Urefu & hali (-B toleo la breki): 76.1 ± 0.5 mm, 127 g·cm²
-
Misa: 0.3 kg
-
Urefu wa kebo: 5 m
-
Mazingira ya uendeshaji (ya kawaida): hadi 60 °C
-
Vifaa: vipengele vya alumini na kipunguza usahihi cha harmonic
Lahaja & Chaguo
-
Mawasiliano: CAN au EtherCAT
-
Kisimbaji: encoder moja au mbili ya sumaku
-
Breki: yasiyo ya breki (ya kawaida) au -B toleo la kushikilia-breki
-
Mazingira: uzuiaji wa maji unaowezekana na kifurushi cha joto la chini
-
Nukuu za mfululizo: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (inaonyesha kipunguzaji, hesabu ya kihisi/kisimbaji cha torque, uwiano, ulinzi, n.k.)
Maombi ya Kawaida
Viungo vya humanoid (mabega/kiwiko/nyonga/goti), mikono ya roboti shirikishi, viigizaji exoskeleton, gimbali za pan-tilt/vision, shoka za kiotomatiki za viwandani, UGV/AGV za ukaguzi wa nguvu, na mitambo ya usaidizi ya baharini/gari.
Vidokezo
-
Sakinisha kwa kutumia mifumo maalum ya skrubu na vistahimilivu vilivyoonyeshwa kwenye michoro.
-
Thibitisha uwiano, usanidi wa programu ya kusimba, basi la mawasiliano, na mahitaji ya breki kabla ya kuagiza.
-
Kutokana na hali ya viwanda ya bidhaa hii, vitengo vilivyosakinishwa/vilivyotumika kwa kawaida havirudishwi; wasiliana na hati za vipimo na wafanyikazi wa kiufundi kabla ya kununua.
Maelezo
Kitendaji cha Pamoja cha Roboti ya Ti5 CRA-R140-52-PRO-XX na -B hutoa nishati ya 90W, usambazaji wa 24–48V, 3A max sasa, azimio la kusimba la 17 RPM, torque, kasi na mawasiliano ya CAN.

Muundo wa Kitendaji cha Pamoja cha Roboti ya Ti5 CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) inajumuisha breki, kihisi cha torque, visimbaji viwili, ukadiriaji wa kuzuia maji, uwiano wa kupunguza, kipenyo cha nje na aina ya gari.

Vitendaji vya pamoja vya mfululizo wa PRO kwa roboti za humanoid, mifupa ya nje, roboti shirikishi, magari, AGV. Vipengele: uimara wa hali ya juu, maisha marefu, msongamano wa juu wa torque, torque ya chini ya cogging, kuzuia maji, kuzuia vumbi, kuzuia mlipuko, kelele ya chini, usahihi wa juu, muundo wa shimoni.
Related Collections



