








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Kipima Mwelekeo na Mzunguko wa Mhimili 6, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Kipima Mwelekeo na Mzunguko wa Mhimili 6, ROS/Matlab
WitMotion
Couldn't load pickup availability
Muhtasari
WitMotion HWT601-AGV-485 ni sensor ya mwelekeo/kuongoza ya axisi 6 iliyoundwa kwa ajili ya roboti za AGV, drones na majukwaa huru. Inachanganya mhimili wa kasi 3 + mhimili wa kasi ya angular 3 na inatoa mwelekeo wa axisi 3 &na quaternion kupitia RS485 (Modbus) kwa hadi 200 Hz. Moduli hii ina filtrering ya dynamic ya Kalman, kalibrishaji sahihi ya turntable, upataji wa bias wa kiotomatiki/mkono, nishati ya akiba kwa ajili ya kuhifadhi mwelekeo wakati wa kuzima nguvu, na nyumba ya IP67 isiyo na maji/kuzuia vumbi. Pia inasaidia kasi nyingi za ngazi (hadi vitengo 32) kwa kipimo cha mwelekeo kilichoratibiwa.
Vipengele Muhimu
-
Angle ya juu ya usahihi: Usahihi wa XY 0.1°; Usahihi wa Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Upendeleo wa gyroscope thabiti: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Ingizo pana 9–36 V, sasa ya kufanya kazi ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Uchukuaji: ombi–jibu kusoma hadi 200 Hz.
-
Algorithimu: mchanganyiko wa chujio cha Kalman na algorithimu maalum ya mwelekeo wa AGV.
-
Programu: suite ya bure ya PC yenye dashibodi za moja kwa moja, michoro ya curve, uonyeshaji wa 3D (gari/mpira/sanduku/ndege), usanidi (upendeleo, rejea ya pembe, kalibrishaji ya kasi, vigezo vya kiwango), rekodi ya data &na uhifadhi wa moja kwa moja, na kuagiza Matlab.
-
Rafiki wa maendeleo: mifano ya programu na msaada wa msimbo kwa ROS, Linux, C/C#, Python.
-
Mazingira: IP67, -40~80 °C (toleo la meza -40~85 °C linaonyeshwa).
-
Kuporomoka: hadi sensorer 32 kwenye RS485 kwa kipimo cha mwelekeo kwa wakati mmoja.
Maelekezo ya Usakinishaji
-
Weka sensor kwenye uso thabiti, tambarare, na imara; msingi usio sawa husababisha makosa ya pembe (tazama MCH.1–2).
-
Hifadhi axisi ya sensor kuwa sambamba na axisi inayopimwa; epuka pembe kati ya axisi (tazama MCH.3–4).
-
Mfano huu unasaidia usakinishaji wa usawa pekee.
Programu &na Uonyeshaji
-
Dashibodi ya Takwimu yenye Nguvu (mwelekeo, kiwango, kasi, uhamasishaji, quaternion, bandari, joto, voltage, n.k.).
-
Paneli ya Mipangilio: kiwango cha baud, anwani ya kifaa, upataji wa bias kiotomatiki, upya wa mhimili wa Z, kalibrishaji ya kasi, rejea ya mwelekeo, kalibrishaji ya mikono ya chanya/negative na vigezo vya kiwango.
-
Modeli za 3D kwa ufuatiliaji wa mwendo wa kueleweka na mipangilio ya wakati halisi yenye masasisho ya nguvu.
-
Muonekano wa data ghafi na uhifadhi wa faili kwa urahisi wa ukusanyaji; Matlab uagizaji wa uchambuzi unasaidiwa.
-
Maonyesho ya ROS IMU INS: ufuatiliaji wa mwelekeo na uonyeshaji wa data ya mwelekeo (yaw/roll/pitch, kasi ya pembe, kasi ya moja kwa moja).
html
Maelezo
Kiunganishi &na Utendaji
| Item | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Kiunganishi / Itifaki | RS485 / Modbus | RS485 / Modbus |
| Kiwango cha baud | 4,800–230,400 bps | 4,800–230,400 bps |
| Data ya pato | 3-axis kuongeza kasi, mwendo wa pembe, pembe, quaternion | Vivyo hivyo |
| Masafa ya sampuli | Hadi 200 Hz (ombile–jibu) | Hadi 200 Hz |
| Usahihi wa pembe za XY | 0.1° | 0. 1° |
| Usahihi wa pembe ya Z (kosa la mzunguko wa 360°) | 0.1° | 0.15° |
| Kiwango cha Accel / ufafanuzi | ±4 g / 0.0001 g/LSB | Vivyo hivyo |
| Kiwango cha Gyro / ufafanuzi | ±250 °/s / 0.0122 (°/s)/LSB | Vivyo hivyo |
| Kiwango cha pembe / ufafanuzi | XZ: ±180°; Y: ±90° / 0.0059° | Vivyo hivyo |
| Ustahimilivu wa upendeleo wa Gyro (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Koefisienti ya joto (XYZ) | 0.002°/°C | 0.002°/°C |
Umeme, Mitambo &na Mazingira
-
Voltage ya usambazaji: 9–36 V; Mzunguko wa kufanya kazi: ≈ 8 mA (12 V)
-
Vipimo: 55 × 36.8 × 24 mm; Urefu wa kebo: 1 m
-
Ulinzi: IP67
-
Joto la kufanya kazi: -40~80 °C (toleo la meza pia linaonyesha -40~85 °C)
-
Usanidi: Usanidi wa usawa tu
-
Kupitisha: Hadi vitengo 32 kwenye RS485
Maeneo ya Matumizi
AGV/AMR na roboti za kubebea, drones/UAVs, magari ya usafirishaji yasiyo na rubani, na moduli za ufahamu wa kuendesha kwa uhuru.
Ujumuishaji wa Mfano &na Uchaguzi
-
HWT601-AGV-485 – usahihi wa juu wa mhimili wa Z (0.1°) na kutokuwa na utulivu kwa Z-bias (2°/h).
-
WT601-AGV-485 – vipimo vya kawaida vya Z-axis (0.15°, 5°/h).
Chagua HWT601 wakati usahihi wa Z-heading ni muhimu.
Maelezo

Sensor ya hali ya juu ya 6-axis yenye usahihi wa juu na 3-axis ya kasi ya kuongezeka, kasi ya angular, pembe, na quaternion. Inajumuisha algorithm ya AGV heading, ulinzi wa IP67, uchujaji wa Kalman, upataji wa bias wa kiotomatiki, na msaada wa programu ya PC.
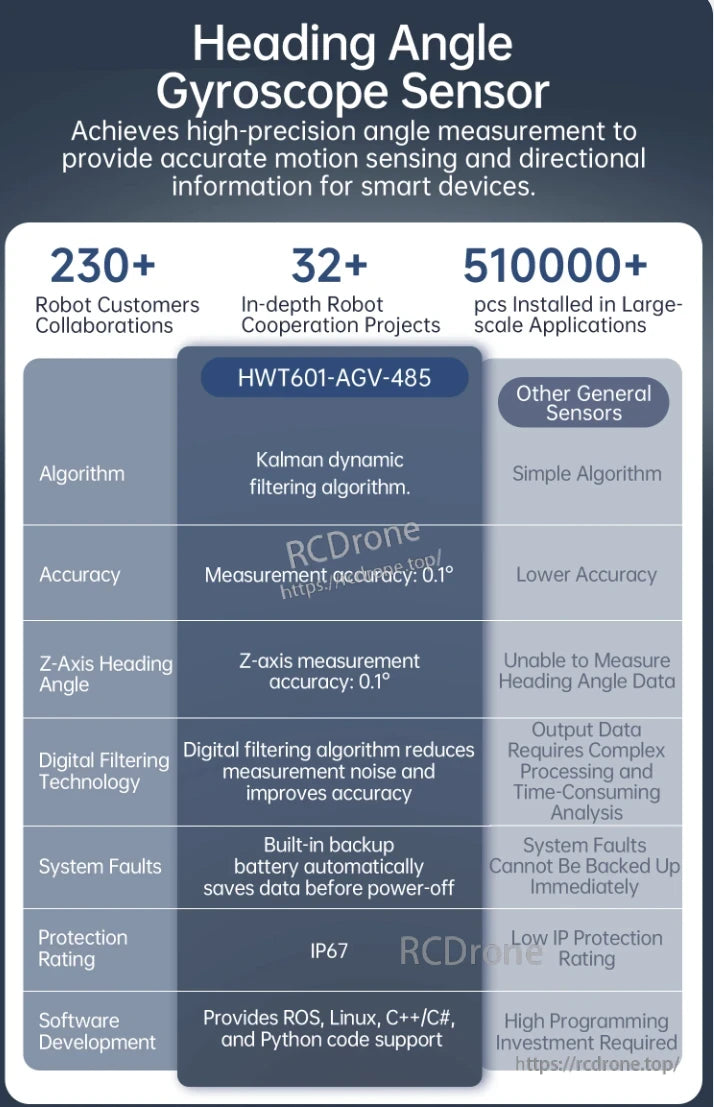
Sensor ya Gyroscope ya Pembe ya Heading HWT601-AGV-485 inatoa kipimo cha pembe chenye usahihi wa juu na uchujaji wa Kalman, usahihi wa 0.1°, kupunguza kelele za dijitali, ulinzi wa IP67, na inasaidia ROS, Linux, C++, na Python. Ushirikiano wa roboti zaidi ya 230 na usakinishaji zaidi ya 510,000+.
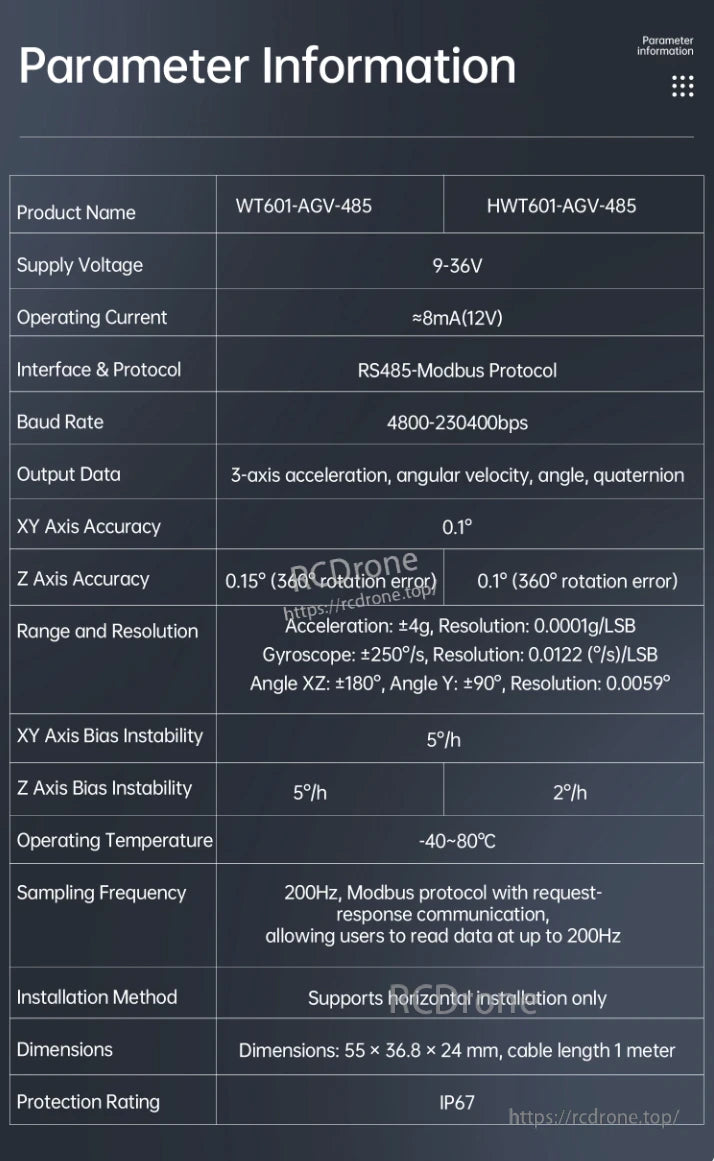
HWT601-AGV-485 IMU inatoa usambazaji wa 9-36V, RS485-Modbus, sampuli ya 200Hz, kasi ya ±4g, gyroscope ya ±250°/s, kiwango cha IP67, na uendeshaji wa -40~80°C. Inatoa data sahihi, ya kiwango cha juu ya 3-axis.
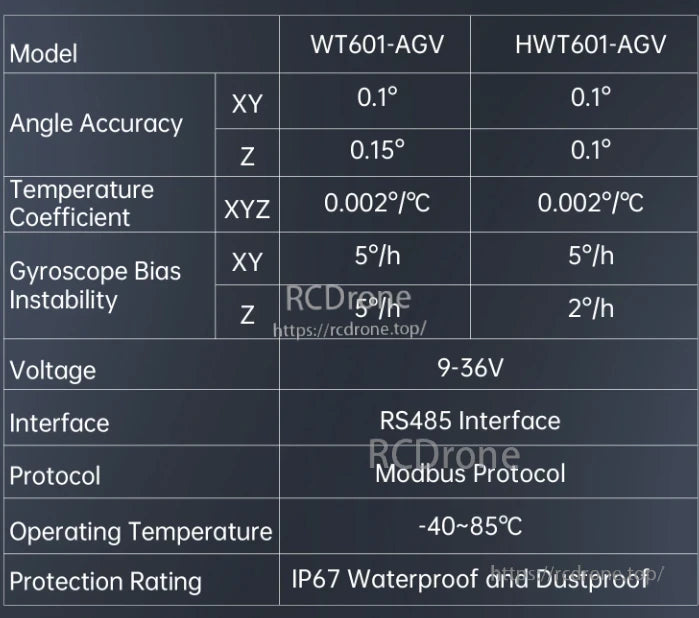
HWT601-AGV IMU inatoa usahihi wa pembe wa 0.1° katika axes za XY na Z ikiwa na coefficient ya joto ya 0.002°/°C katika XYZ. Ustahimilivu wa bias ya gyroscope ni 5°/h (XY) na 2°/h (Z). Inafanya kazi kwa 9–36V, inatumia RS485 na Modbus, na inafanya kazi kutoka -40 hadi 85°C. Imewekwa IP67, inatoa ulinzi wa kuzuia maji na vumbi. Toleo la WT601-AGV lina specs zinazofanana lakini usahihi wa 0.15° katika axis ya Z na ustahimilivu wa bias ya 5°/h katika axis ya Z. Mifano yote inahakikisha utendaji wa kuaminika katika mazingira magumu.
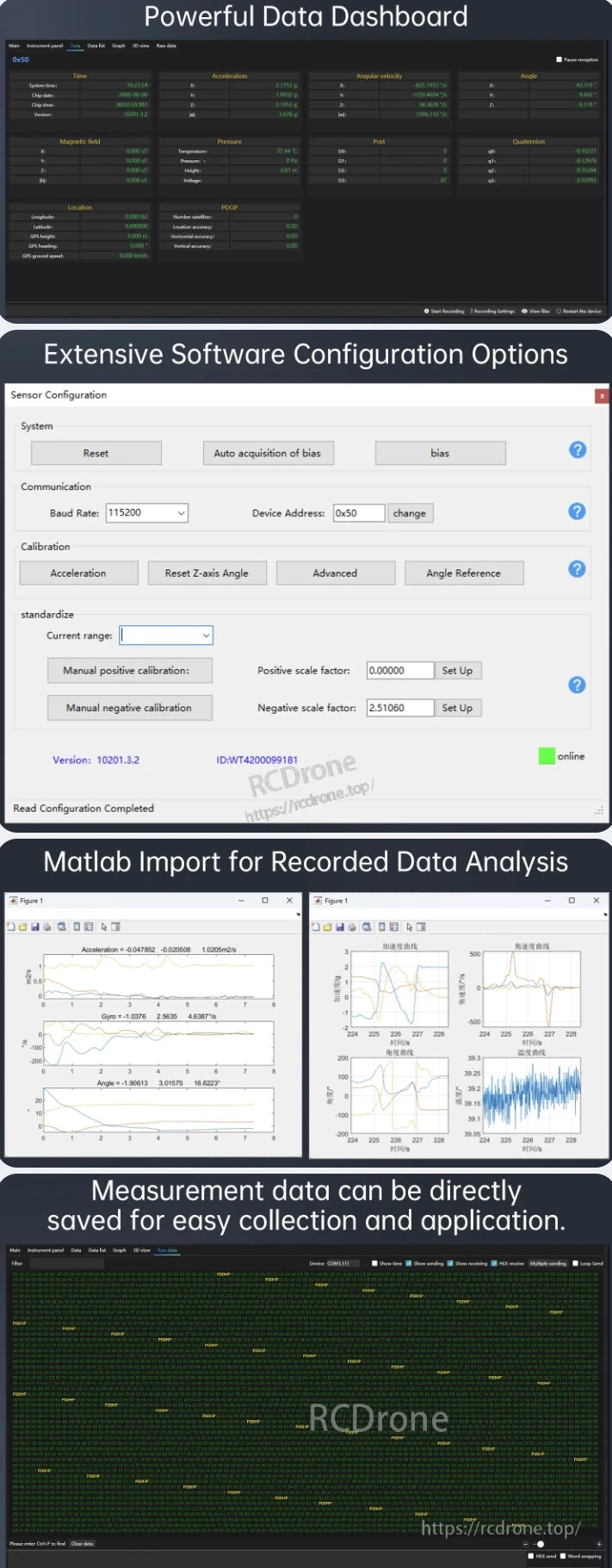
Dashibodi yenye nguvu ya data yenye kusoma sensa kwa wakati halisi, usanidi mpana wa programu, uagizaji wa MATLAB kwa uchambuzi, na uhifadhi wa moja kwa moja wa data kwa urahisi wa ukusanyaji na matumizi.
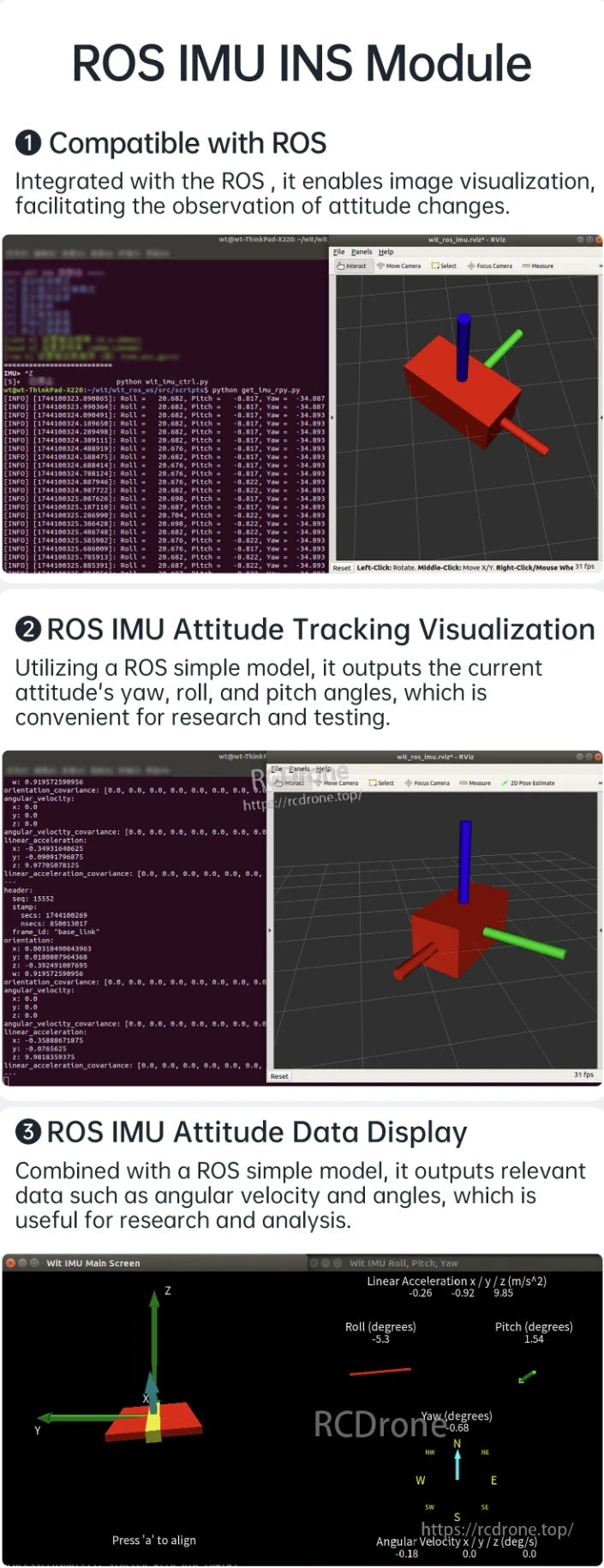
Moduli wa ROS IMU INS unatoa ulinganifu wa ROS, unaonyesha ufuatiliaji wa mwelekeo, na kuonyesha wakati halisi wa roll, pitch, yaw, kasi ya angular, na kasi ya moja kwa moja kwa ajili ya utafiti na uchambuzi.
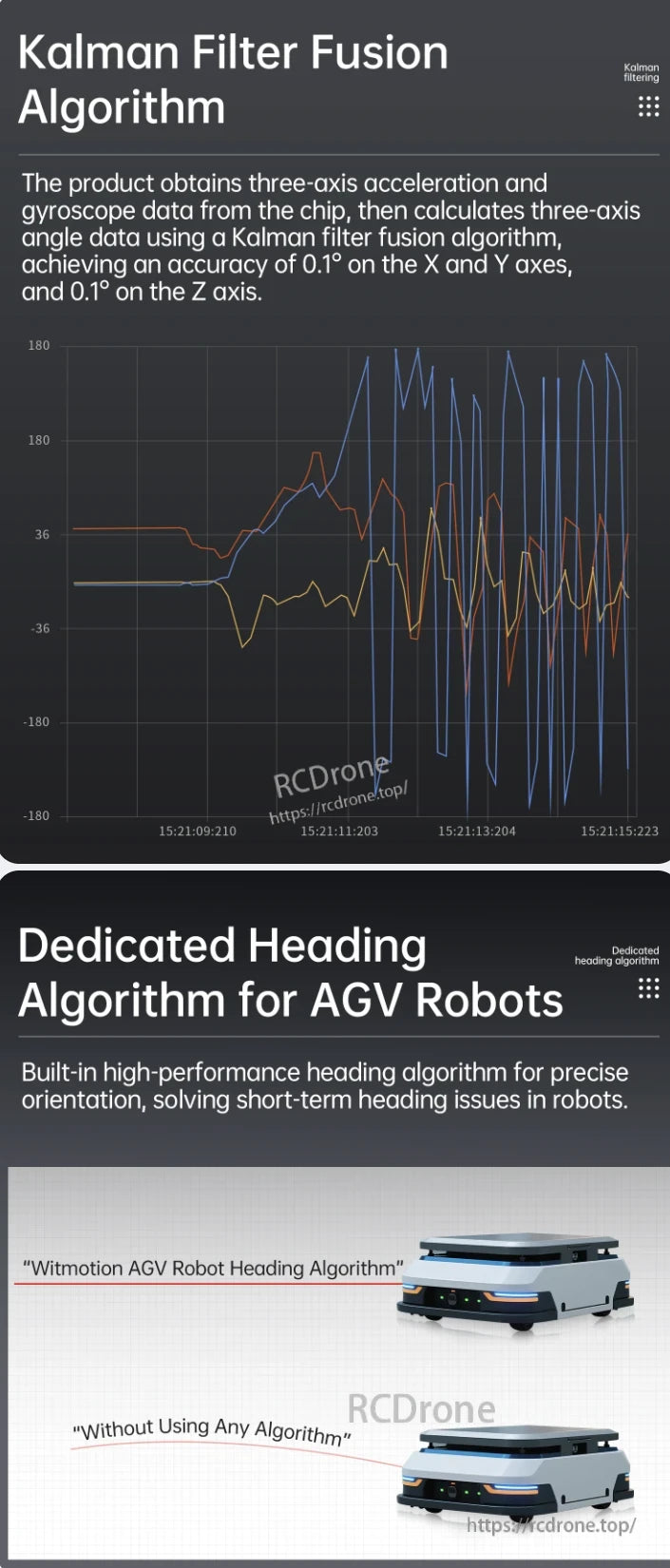
WitMotion HWT601 AGV IMU inatoa data sahihi ya pembe za 3-axis kwa usahihi wa 0.1° kwa kutumia muunganiko wa chujio cha Kalman. Algorithimu yake maalum ya kuelekeza inahakikisha mwelekeo thabiti wa roboti, ikiboresha kwa kiasi kikubwa utendaji ikilinganishwa na mifumo isiyo na algorithimu kama hizo.
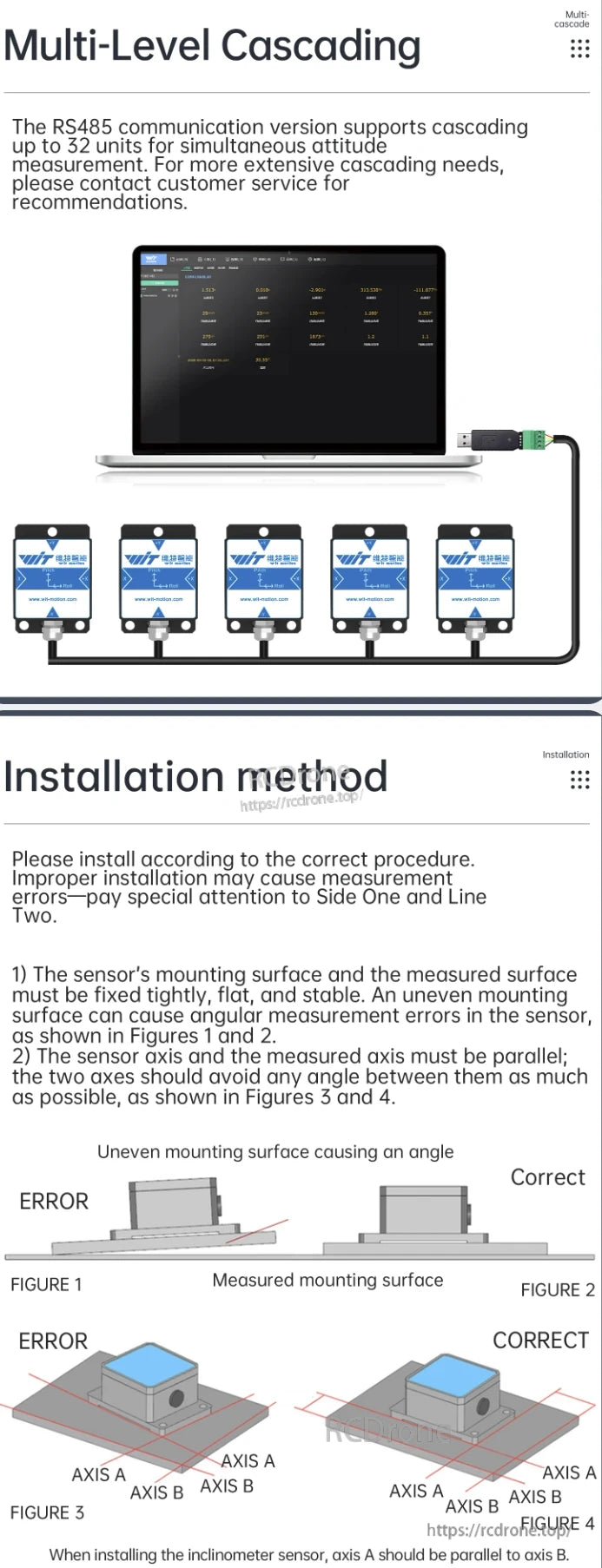
WitMotion HWT601 AGV IMU inasaidia hadi vitengo 32 vinavyofuatana kupitia RS485 kwa ajili ya kipimo cha mwelekeo. Hakikisha usakinishaji wa gorofa, thabiti na akisi zilizolingana kwa usahihi.
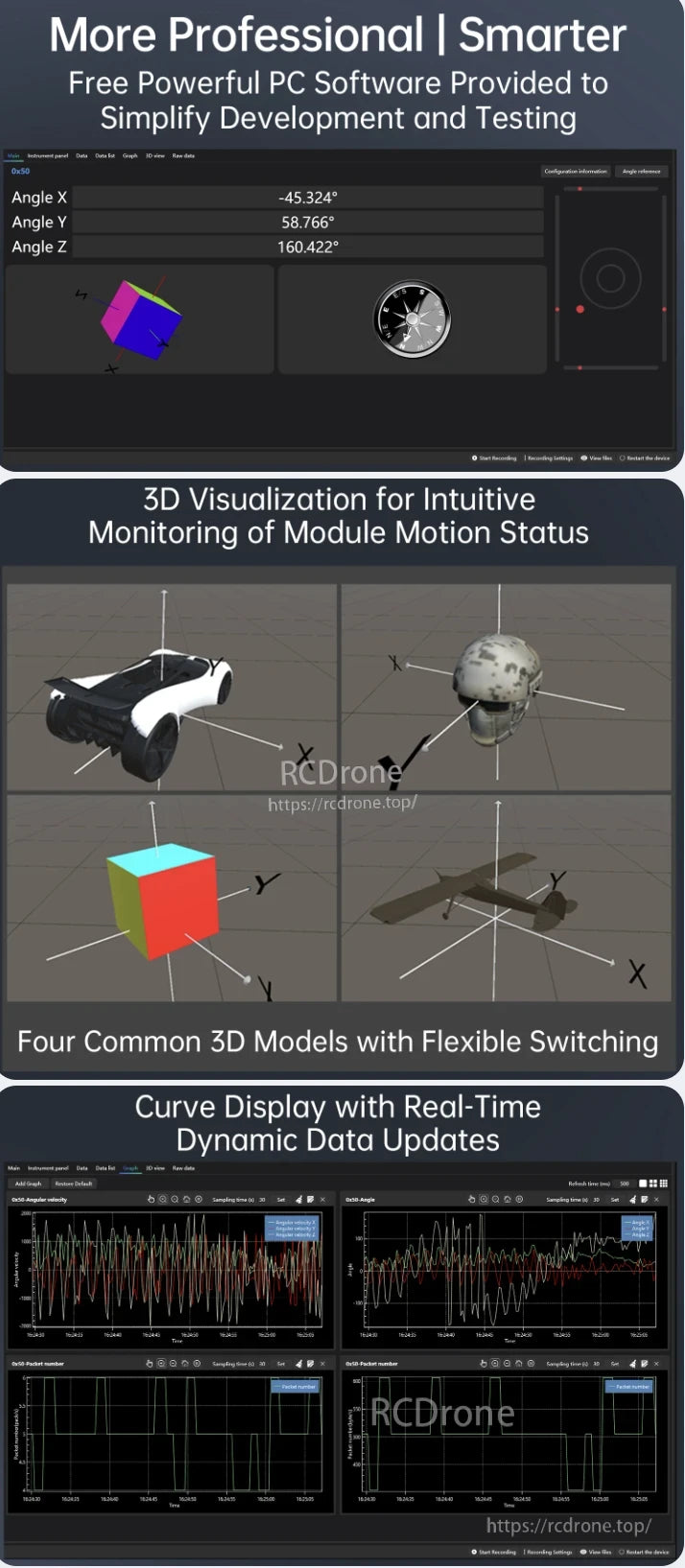
Programu ya kitaalamu ya PC kwa WitMotion HWT601 AGV IMU inatoa uonyeshaji wa 3D wa wakati halisi, ufuatiliaji wa pembe, na uonyeshaji wa curve ya dinamik.Vipengele vinajumuisha ufuatiliaji wa mwendo wa akili, kubadilisha mifano kwa urahisi, na masasisho ya data ya moja kwa moja kwa maendeleo na majaribio yenye ufanisi.
Hati za msaada zinajumuisha programu za mfano za STM32, Arduino, 51 UART, Windows C++, na Matlab kusaidia waendelezaji kutumia bidhaa hiyo kwa kutumia mafunzo na mifano ya msimbo.
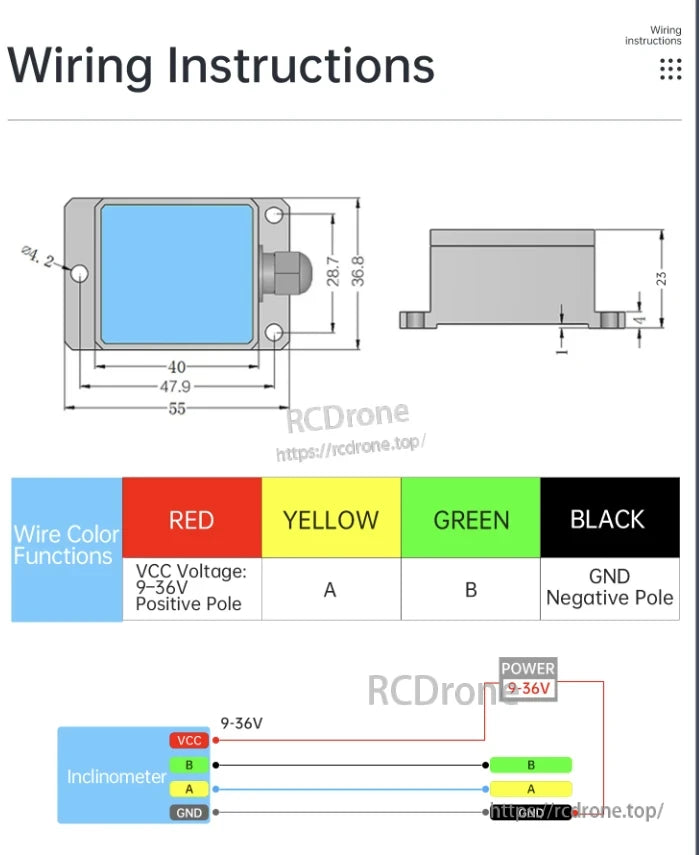
Mwongozo wa wiring wa WitMotion HWT601 AGV IMU: nyekundu (9-36V), njano (A), kijani (B), mweusi (GND). Vipimo na mchoro wa muunganisho umepewa.

WitMotion HWT601 AGV IMU kwa drones, kuendesha kwa uhuru, roboti za kubebea, na magari ya usafirishaji yasiyo na rubani.
Related Collections








