Kihisi cha Pembe cha WitMotion WT1-IMU (Akseleromita + Inklinometra), 3.3–5V TTL, Usahihi wa 0.5°, Matokeo 20 Hz
Kihisi cha Pembe cha WitMotion WT1-IMU (Akseleromita + Inklinometra), 3.3–5V TTL, Usahihi wa 0.5°, Matokeo 20 Hz
WitMotion
Couldn't load pickup availability
Muhtasari
WitMotion WT1-IMU ni sensor ya pembe ya dual-axis yenye gharama nafuu ambayo inachanganya data za accelerometer/gyroscope/magnetometer na algorithimu ya Kalman-filter ili kutoa pembe ya X/Y kwa wakati halisi. Moduli hii inafanya kazi kutoka 3.3–5 V, inawasiliana kupitia TTL serial, na imejengwa kwenye PCB ndogo iliyofunikwa kwa dhahabu kwa urahisi wa uunganisho wa SMT. Usahihi wa kawaida wa pembe ni ±0.5° (X & Y) ikiwa na kasi ya kurudi ya 20 Hz. Programu rasmi ya PC inatoa dashibodi, kalibrishaji, uandishi wa kumbukumbu, na usafirishaji; SDK/mifano inasaidia MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, na C/C#.
Vipengele Muhimu
-
Matokeo ya pembe ya dual-axis (X, Y) kwa kipimo cha mwelekeo/tilt
-
Kalman filter + algorithimu ya mchanganyiko ya WitMotion kwa utulivu wa juu
-
Kutoa: 3.3–5 V, TTL UART; LDO embedded
-
Usahihi: ±0.5° (X &na Y)
-
Kiwango cha pembe: X ±180°, Y ±90°
-
Kiwango cha kurudi chaguo-msingi: 20 Hz (kinachoweza kubadilishwa katika programu)
-
Matumizi ya sasa: kawaida ~5 mA, <10 mA
-
Compact 15.24 × 15.24 mm moduli; mashimo ya stamp ya dhahabu
-
Programu ya bure ya PC: dashibodi, kalibrishaji, mipangilio ya upana/baud, rekodi ya data &na upya, usafirishaji kwa TXT/BIN/PLAY/XLS
-
Vifaa/vifaa: kipitisha USB-to-TTL chaguo na kifaa cha kujaribu kuchoma kwa urahisi kuanzisha
Maelezo ya kiufundi
| Item | Thamani |
|---|---|
| Mfano | WT1-IMU |
| Voltage | 3.3–5 V |
| Kiunganishi | TTL UART |
| Maudhui ya pato | Angle ya mhimili 2 (X, Y) |
| Kiwango cha pembe | X: ±180°;Y: ±90° |
| Usahihi wa pembe | X/Y: ±0.5° |
| Kiwango cha kurudi chaguo la kawaida | 20 Hz |
| Kiwango cha Baud | 9600 (20 Hz pato kwa chaguo la kawaida) |
| Sasa | typ. 5 mA; <10 mA |
Vipimo &na Mhimili
| Ukubwa (mm) | Thamani |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (kimo) | 2 |
Maelezo ya mhimili: X kuelekea kulia, Y juu, Z nje kutoka kwenye bodi; mzunguko unafuata sheria ya mkono wa kulia.
Pinout (shimo la stamp 12-pin)
| Nambari | Pin | Funguo |
|---|---|---|
| 1 | D0 | NC (imehifadhiwa) |
| 2 | VCC | 3.3–5 V input |
| 3 | RX | Data ya mfululizo ingizo (TTL) |
| 4 | TX | Data ya mfululizo toleo (TTL) |
| 5 | GND | Ardhi |
| 6 | SWIM | Kiunganishi cha data cha SWIM |
| 7 | D3 | NC (imehifadhiwa) |
| 8 | GND | Ardhi |
| 9 | SDA | NC (imehifadhiwa) |
| 10 | SCL | NC (imehifadhiwa) |
| 11 | VCC | 3.3–5 V input |
| 12 | D2 | NC (hifadhi) |
Muunganisho wa MCU: TTL serial; kuunganisha TX↔RX (MCU-TX → WT1-IMU RX, MCU-RX → WT1-IMU TX), VCC na GND ni za kawaida.
Programu &na Maendeleo
-
Dashibodi: mtazamo wa moja kwa moja wa pembe, kasi, kasi ya pembe, uwanja wa magnetic, quaternion, nk.
-
Menyu ya Config: kasi &na kalibrishaji ya magnetic, mwelekeo wa kuweka, frequency ya pato/banda, baud-rate, hali ya usingizi.
-
Kurekodi/Export: haraka log na kusafirisha kwa TXT/BIN/PLAY au nakala kwenye Excel (XLS).
-
Vifaa: mifano/SDKs kwa MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#.
-
Kifaa cha kupima cha hiari kwa flashing/kuanzisha plug-and-play.
Matumizi ya Kawaida
Onyesho lililowekwa kwenye kichwa, ufuatiliaji wa mwendo, roboti, AGV/UGV, kuendesha bila rubani, uchimbaji/monitoring ya mtambo/viwanda, vifaa vya automatisering, ndege za watu R&D, ufuatiliaji wa usalama, na mashamba ya akili/yenye automatisering.
Maelezo

Sensor ya pembe ya dual-axis, yenye gharama nafuu, thabiti, na algorithm ya Kalman filter, iliyothibitishwa na ISO9001.
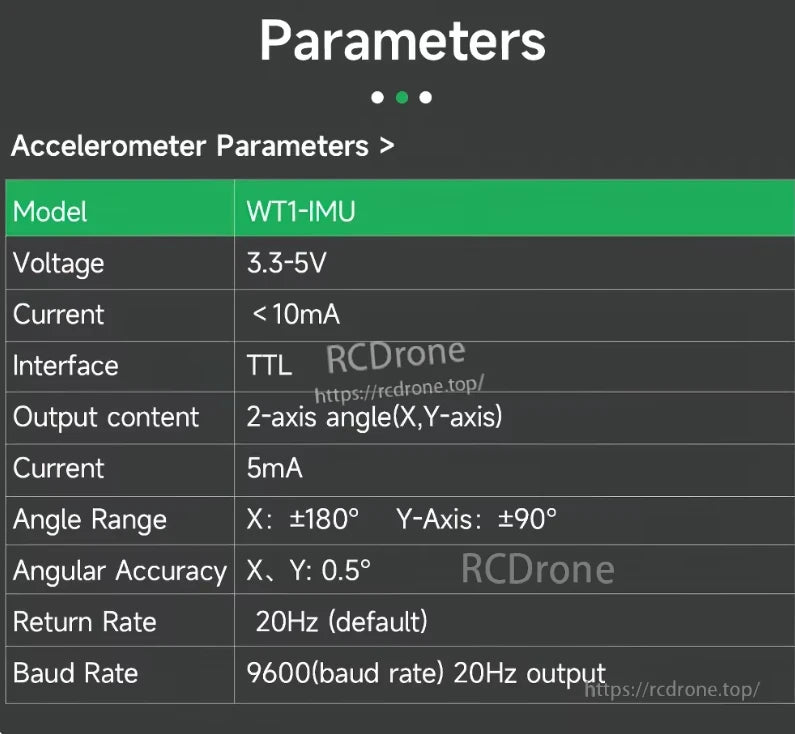
WT1-IMU accelerometer inafanya kazi kwa 3.3-5V, <10mA sasa, interface ya TTL. Inatoa pembe za 2-axis (X: ±180°, Y: ±90°) kwa usahihi wa 0.5°. Kiwango cha kurudi chaguo-msingi 20Hz, kiwango cha baud 9600.
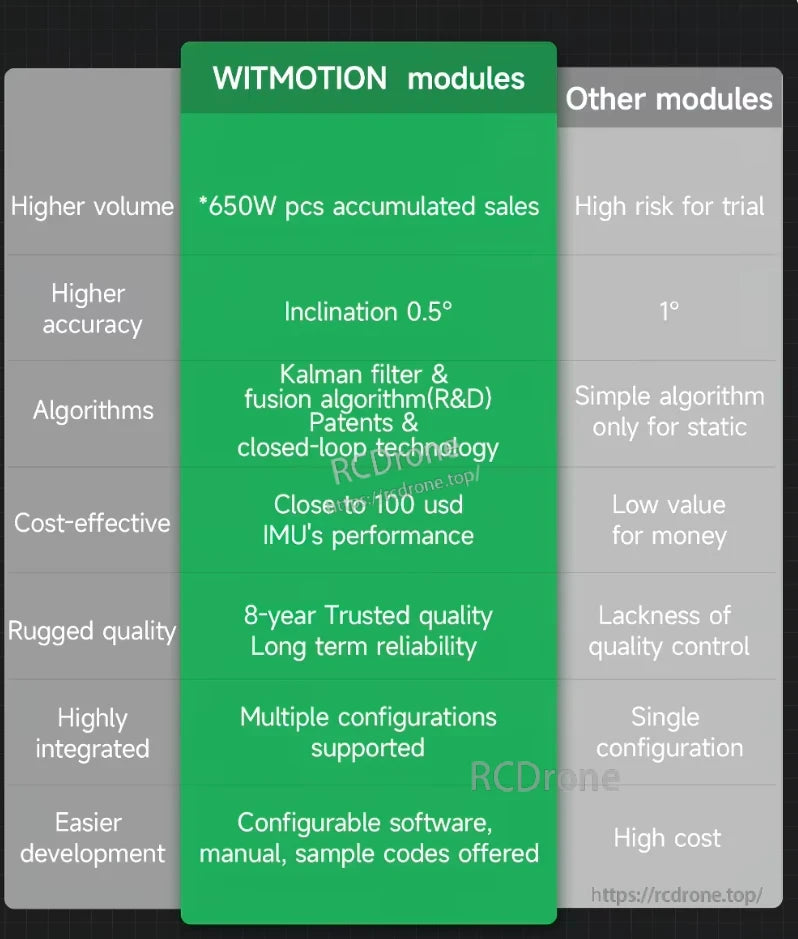
Moduli za WitMotion hutoa ujazo mkubwa, usahihi, na ufanisi wa gharama kwa muundo thabiti, mipangilio mingi, na maendeleo rahisi. Wanajumuisha mauzo ya 650W, mwelekeo wa 0.5°, chujio cha Kalman, teknolojia ya mzunguko ulifungwa, na programu inayoweza kubadilishwa. Moduli nyingine hutoa utendaji wa chini, vipengele vichache, na hatari kubwa.
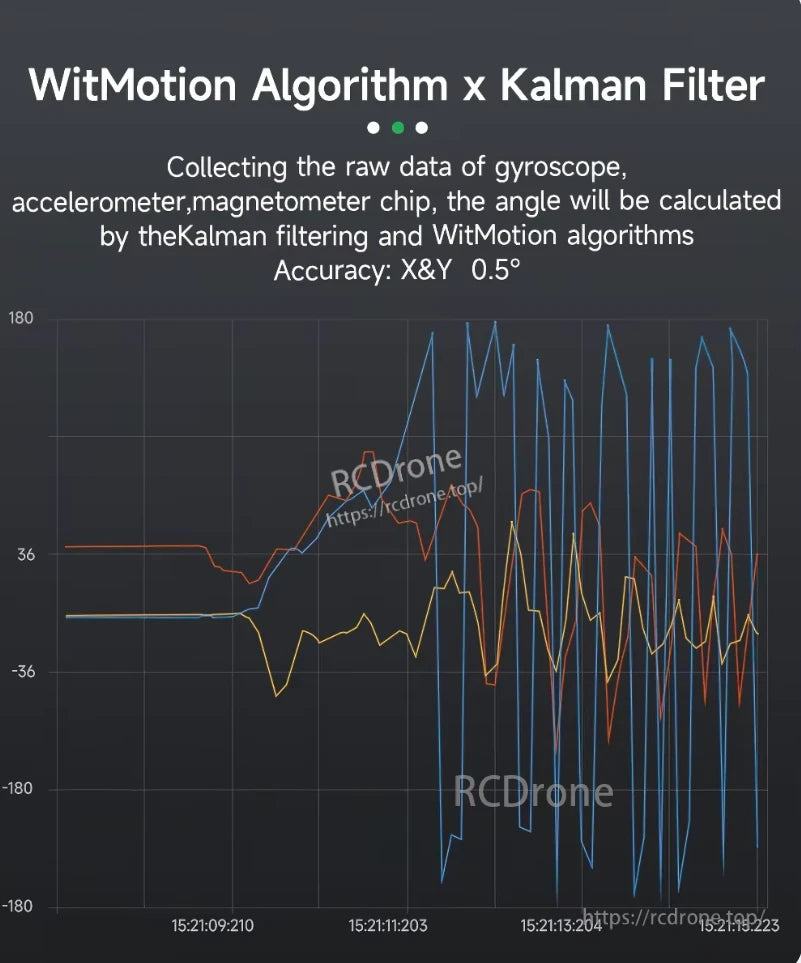
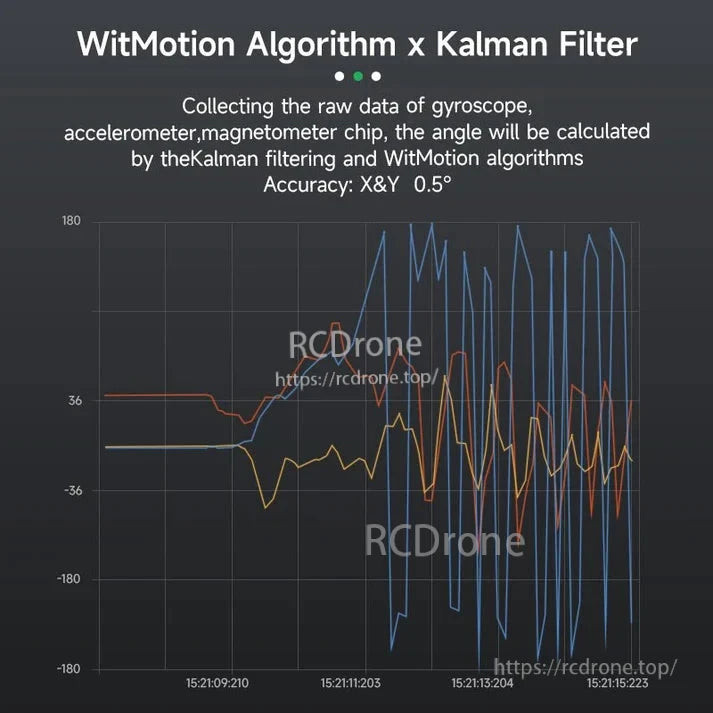
Algorithimu ya WitMotion x Chujio cha Kalman. Hutoa data ghafi kutoka kwa gyroscope, accelerometer, na magnetometer. Hesabu pembe kwa kutumia uchujaji wa Kalman na algorithimu za WitMotion. Usahihi: X&Y 0.5°.
Kiunganishi: 3.3~5V, TTL, LDO iliyojumuishwa. Compact & rahisi kufunga na bodi ya tabaka 4 yenye wiani mkubwa na mashimo ya stamp ya dhahabu. Kubadilisha anuwai kwa wanaoanza. Vifaa vya maendeleo vinajumuisha programu, mwongozo, itifaki, SDK, na mifano ya msimbo.
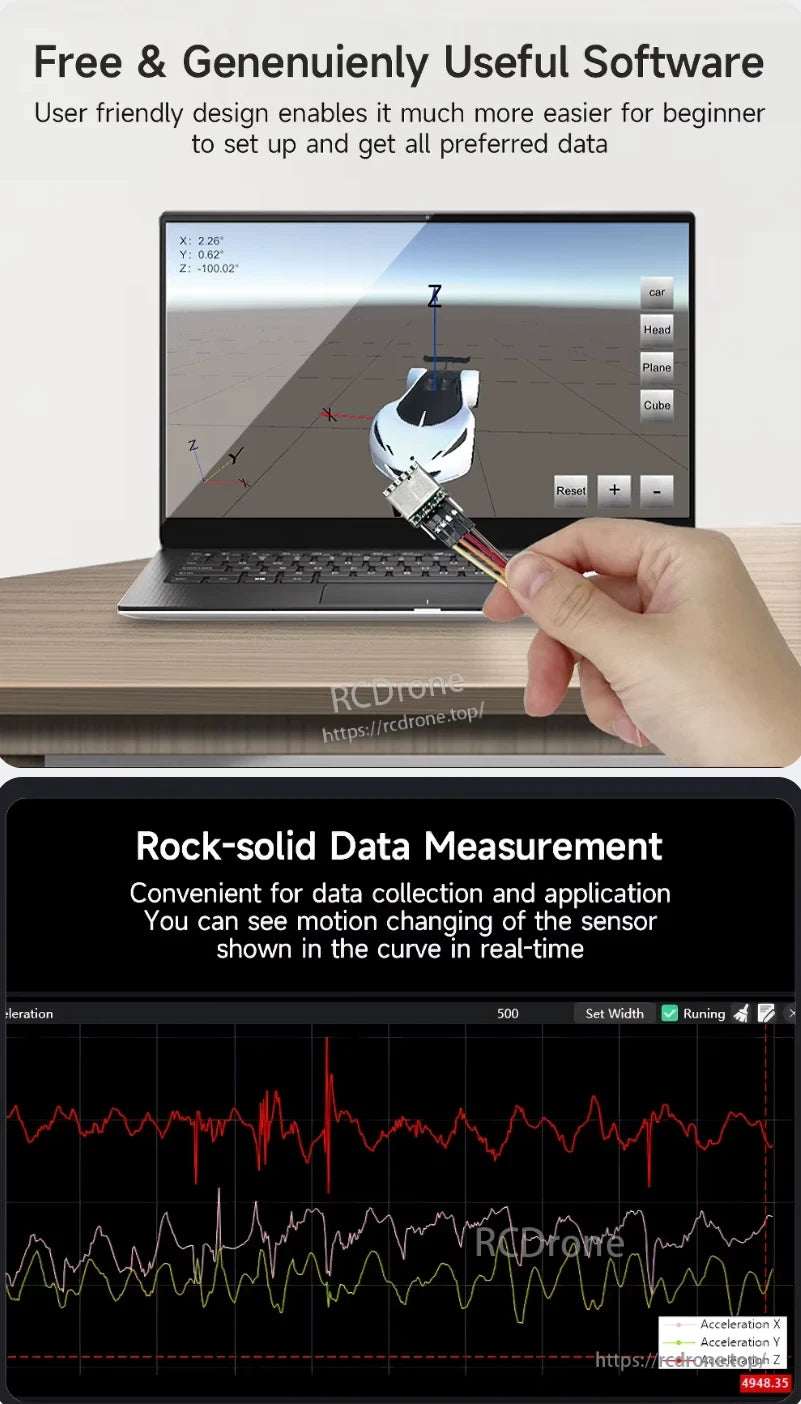
Programu za bure &na zinazofaa kwa kweli hutoa muundo rahisi kwa ajili ya kuweka na kupata data. Ufuatiliaji wa mwendo kwa wakati halisi na kipimo thabiti cha data huonyesha mabadiliko ya kasi katika axes za X, Y, Z kupitia mikondo ya dynamic.
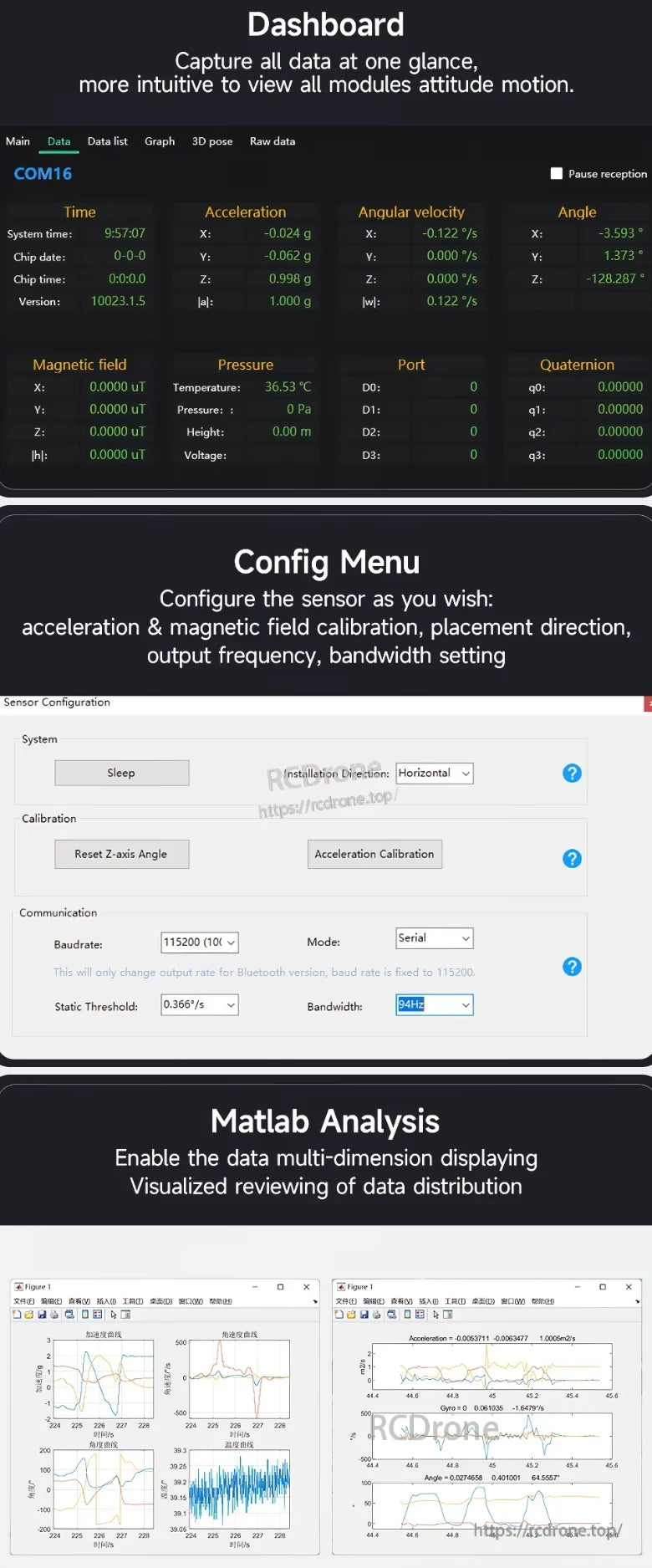
Dashibodi inaonyesha data za sensa kwa wakati halisi ikiwa ni pamoja na kasi, kasi ya angular, pembe, uwanja wa magnetic, shinikizo, na quaternion. Menyu ya usanidi inaruhusu kalibrishaji, mwelekeo wa usakinishaji, kiwango cha baud, na mipangilio ya upana wa bendi. Uchambuzi wa Matlab unaruhusu uonyeshaji wa data wa vipimo vingi.
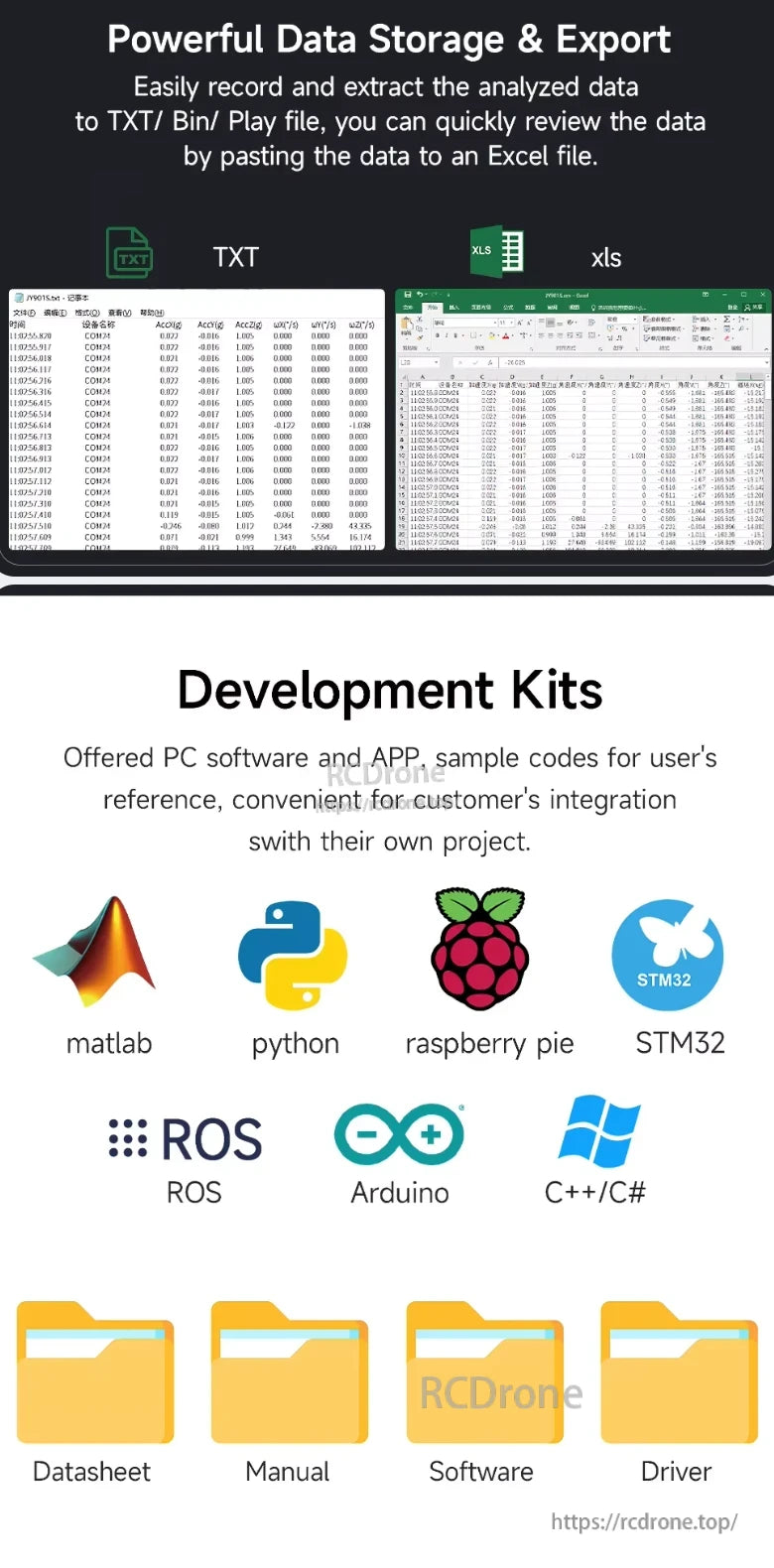
Hifadhi ya data yenye nguvu na usafirishaji hadi TXT, BIN, au faili za Play; inafaa na MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#. Inajumuisha karatasi ya data, mwongozo, programu, na dereva kwa ajili ya uunganisho rahisi.
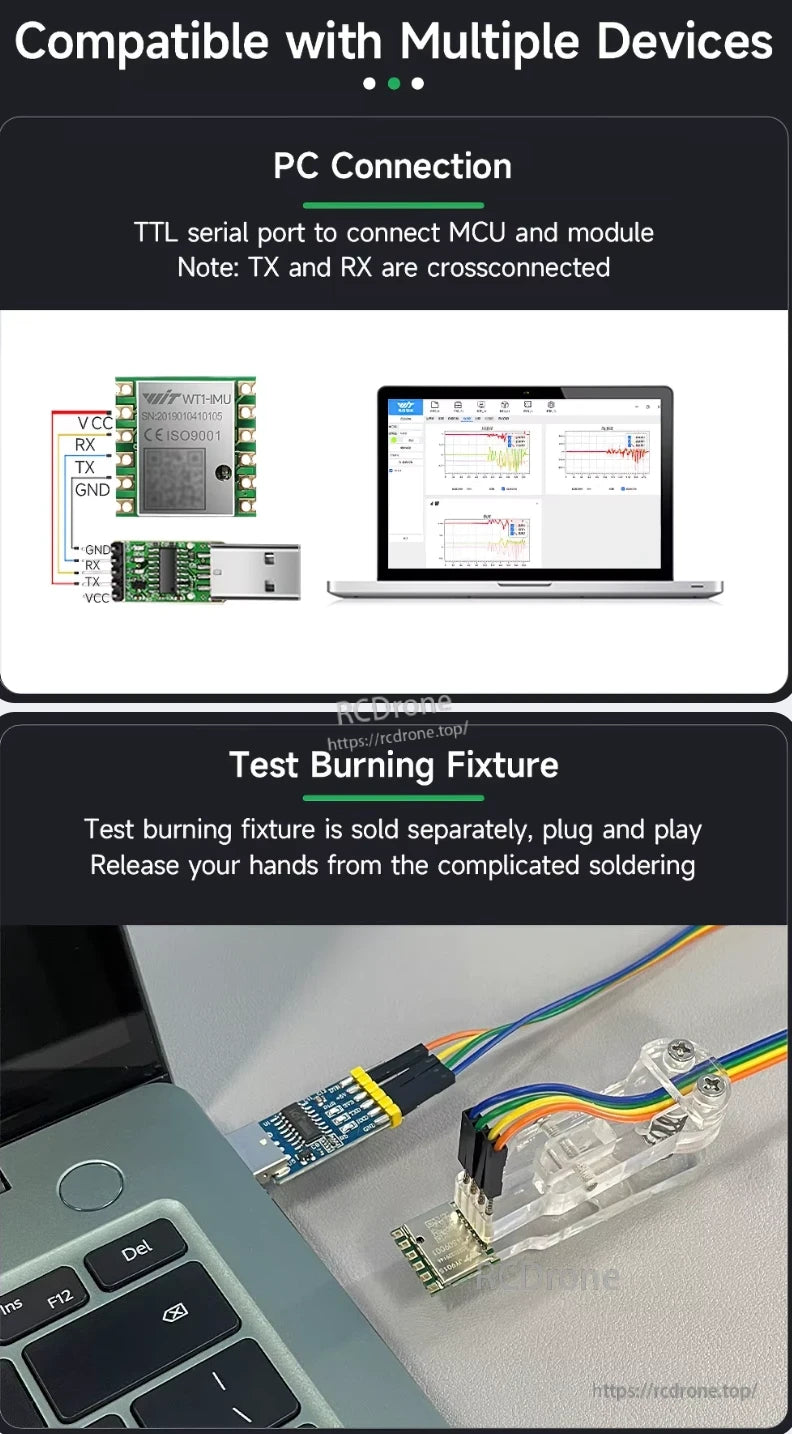
WitMotion WT1-IMU inasaidia muunganisho wa PC kupitia bandari ya TTL serial na TX na RX zilizounganishwa kwa msalaba.Inapatikana na vifaa vingi. Kifaa cha kujaribu kinauzwa kando, plug and play kwa urahisi wa kuweka bila kulehemu.
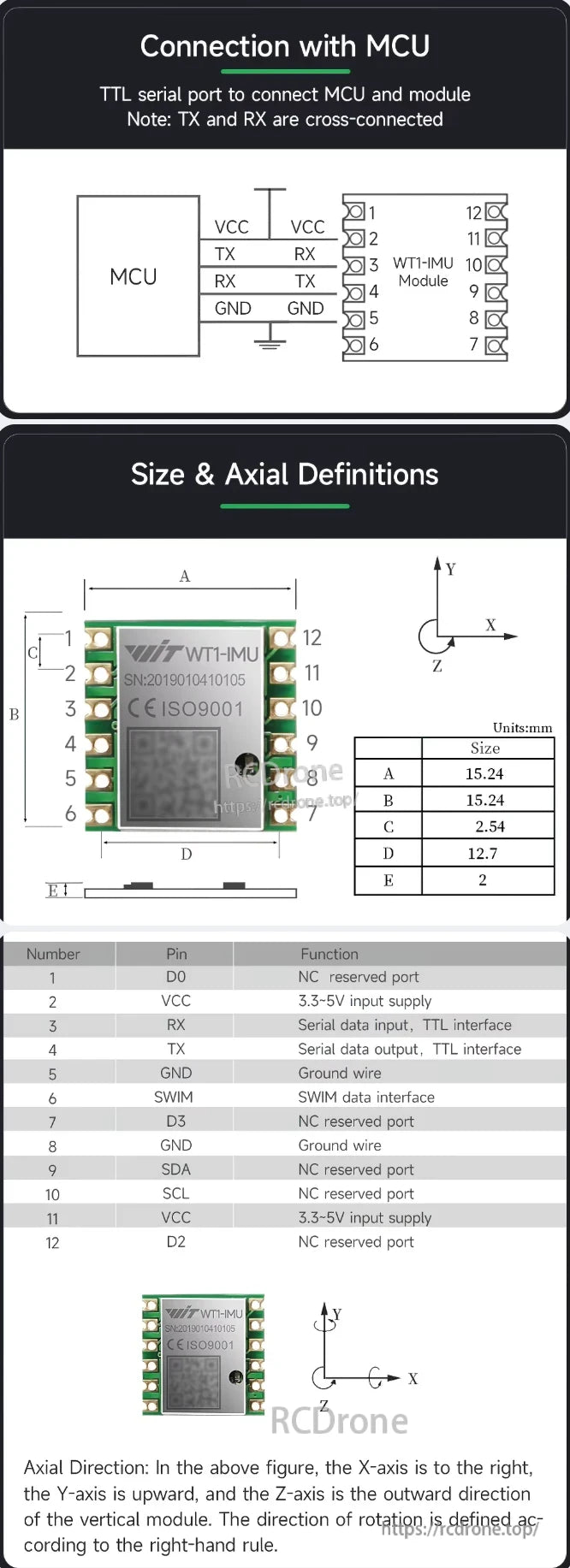
WitMotion WT1-IMU sensor ya pembe ya dual-axis inatoa muunganisho wa TTL serial, mpangilio wa pini 12, ukubwa wa kompakt 15.24×15.24×2.54 mm, axes za sheria ya mkono wa kulia, na inajumuisha pini za VCC, GND, TX, RX, SWIM, SDA, SCL.

Matumizi ya sensor ya IMU: uchimbaji, kilimo, roboti, minara, automatisering, drones, ufuatiliaji, uangalizi.
Related Collections