Kihisi cha WitMotion WT61C cha Usahihi wa Juu (MPU6050) - 6-Axis Acc+Gyro+Angle AHRS IMU kwa Arduino / TTL & RS232
Kihisi cha WitMotion WT61C cha Usahihi wa Juu (MPU6050) - 6-Axis Acc+Gyro+Angle AHRS IMU kwa Arduino / TTL & RS232
WitMotion
Couldn't load pickup availability
Muhtasari
WitMotion WT61C ni 6-axis AHRS IMU yenye gharama nafuu inayounganisha accelerometer ya 3-axis na gyroscope ya 3-axis kutoa kuongezeka, kasi ya angular, na pembe ya 3-axis (roll/pitch/yaw). Imewezeshwa na algorithimu ya mchanganyiko ya WitMotion (Kalman), inatoa usahihi wa pembe ya XY static wa 0.05° (0.1° dynamic), na kuifanya kuwa bora kwa ugunduzi wa mwelekeo, mtetemo, na hali katika miradi ya embedded, robotics, automation, majukwaa ya usawa, na uunganishaji wa VR/AR. Inasaidia TTL (3.3–5 V) na RS232 (5–36 V) interfaces za serial na inafanya kazi bila matatizo na Arduino, STM32, C/C++, na MATLAB kwa kutumia SDK na zana za PC zilizotolewa.
Vipengele Muhimu
-
Matokeo ya 6-Axis: kuongezeka kwa 3-axis, kasi ya angular ya 3-axis, pamoja na pembe ya 3-axis.
-
Usahihi wa juu: XY static 0.05°, dynamic 0.1°; acceleration stability 0.01 g.
-
Wide ranges: Acceleration ±16 g; Gyro ±2000 °/s; Angle X/Z ±180°, Y 90°.
-
Adjustable output rate: 0.2–100 Hz; baud 9600 / 115200 bps.
-
Dual interface: TTL 3.3–5 V or RS232 5–36 V for easy MCU/industrial integration.
-
WitMotion Fusion Algorithm: Kalman filtering with drift compensation for stable attitude.
-
Configurable via software: Kalibrishaji cha Acc, mwelekeo wa uwekaji, upana wa bendi, kiwango cha pato, rejesha mhimili wa Z kuwa 0°.
-
Rasilimali za maendeleo: Bure programu ya PC ya Windows (MiniIMU.exe), madereva (CH340/CP2102), mwongozo &na karatasi ya data, SDK kwa 51 serial, C/C++, STM32, Arduino, MATLAB, pamoja na programu ya Android na video za onyesho.
-
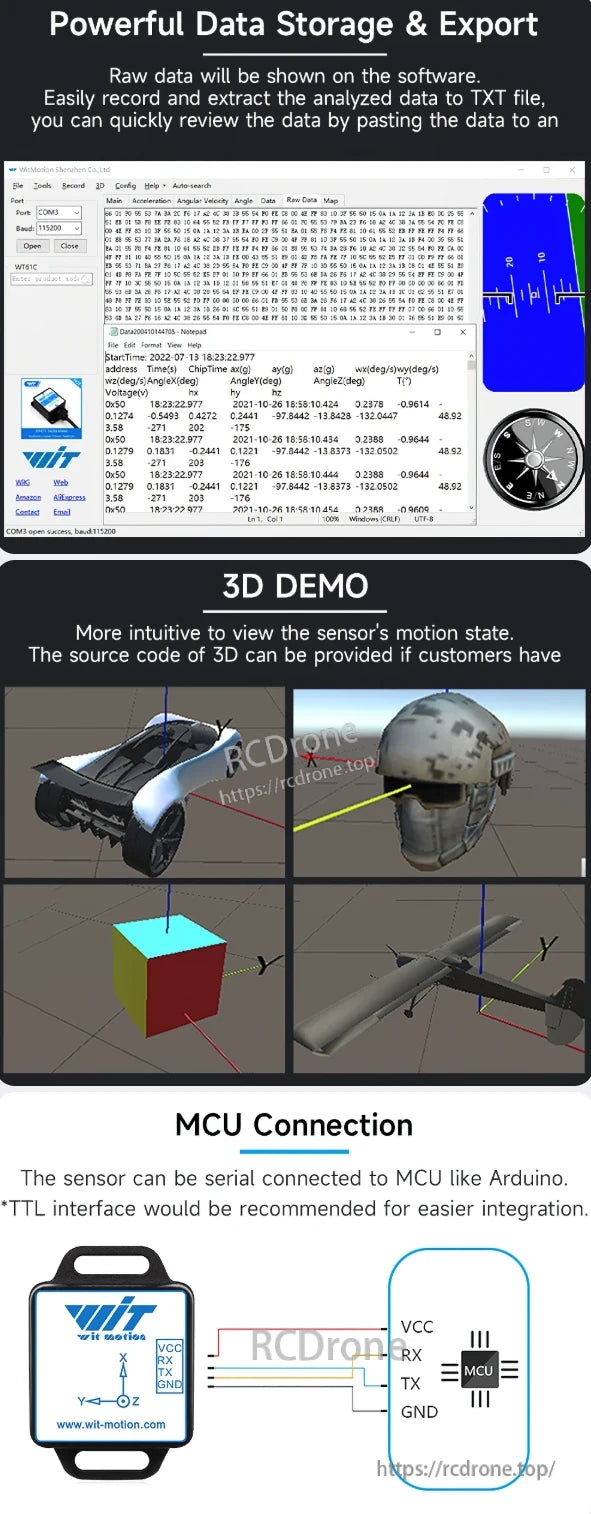
Zana za data: Muonekano wa data ghafi, chati za wakati halisi, usafirishaji wa TXT, na onyesho la mwendo wa 3D (kanuni ya chanzo inapatikana kwa ombi).
Maelezo ya kiufundi
-
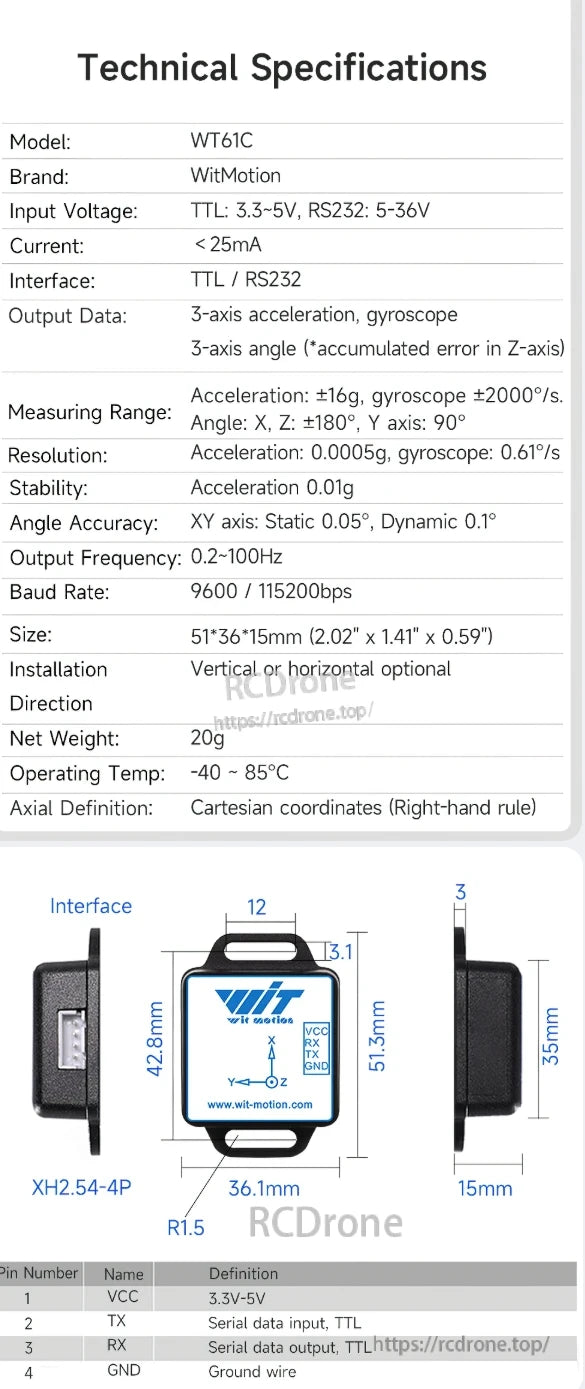
Mfano: WT61C
-
Brand: WitMotion
-
Voltage ya Kuingiza: TTL: 3.3–5 V; RS232: 5–36 V
-
Current: < 25 mA
-
Interface: TTL / RS232
-
Output Data: 3-axis acceleration, 3-axis gyro, 3-axis angle (makosa yaliyokusanywa katika Z-axis)
-
Measuring Range: Acc ±16 g; Gyro ±2000 °/s; Angle X/Z ±180°, Y 90°
-
Resolution: Acc 0.0005 g; Gyro 0.61 °/s
-
Stability: Acc 0.01 g
-
Angle Accuracy: XY static 0.05°, dynamic 0.1°
-
Output Frequency: 0.2–100 Hz
-
Baud Rate: 9600 / 115200 bps
-
Size: 51 × 36 × 15 mm (≈ 2.02″ × 1.41″ × 0.59″)
-
Installation: Wima au usawa
-
Net Weight: 20 g
-
Operating Temp: −40 ~ 85 °C
-
Axis Definition: Mipangilio ya Cartesian, sheria ya mkono wa kulia
Pinout (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — Takwimu za serial kuingiza, TTL
-
RX — Takwimu za serial kutoka, TTL
-
GND — Ardhi
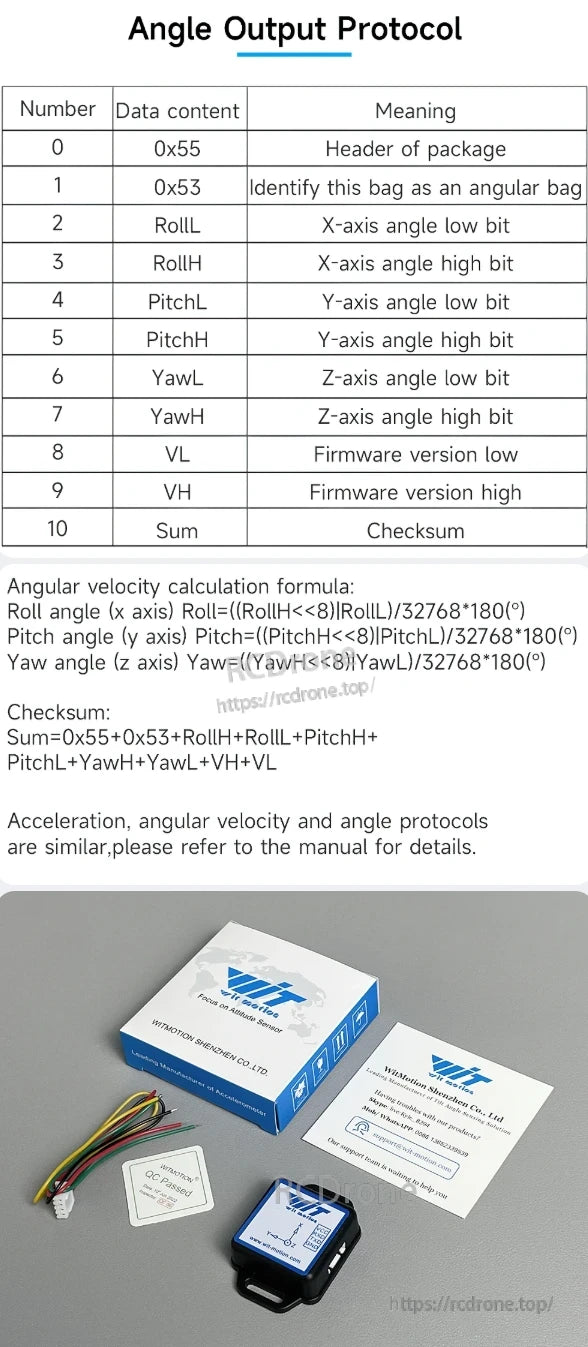
Protokali ya Matokeo ya Angle (kichwa cha fremu 0x55 0x53)
| Index | Byte | Maana |
|---|---|---|
| 0 | 0x55 | Kichwa |
| 1 | 0x53 | Tambua kama angle pakiti |
| 2 | RollL | Byte ya chini ya angle ya X-axis |
| 3 | RollH | Byte ya juu ya angle ya X-axis |
| 4 | PitchL | Byte ya chini ya angle ya Y-axis |
| 5 | PitchH | Y-axis angle high byte |
| 6 | YawL | Z-axis angle low byte |
| 7 | YawH | Z-axis angle high byte |
| 8 | VL | Firmware version low |
| 9 | VH | Firmware version high |
| 10 | Sum | Checksum |
Angle decode (°):
-
Roll = ((RollH<<8)|RollL) / 32768 * 180 -
Pitch = ((PitchH<<8)|PitchL) / 32768 * 180 -
Yaw = ((YawH<<8)|YawL) / 32768 * 180
Checksum:Sum = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(Kifurushi cha kasi na mwelekeo wa pembe kinafuata muundo sawa.)
Programu &na Uunganisho
-
Zana za Windows zinaonyesha fremu za raw, data zilizopangwa, michoro ya moja kwa moja, na viashiria vya mwelekeo; zinasaidia kurekodi &na usafirishaji wa TXT.
-
Onyesho la 3D linaonyesha mwendo; msimbo wa chanzo unaweza kutolewa.
-
Muunganisho wa MCU: serial moja kwa moja kwa Arduino/MCU; TTL inapendekezwa kwa uunganisho rahisi.
Matumizi ya Kawaida
-
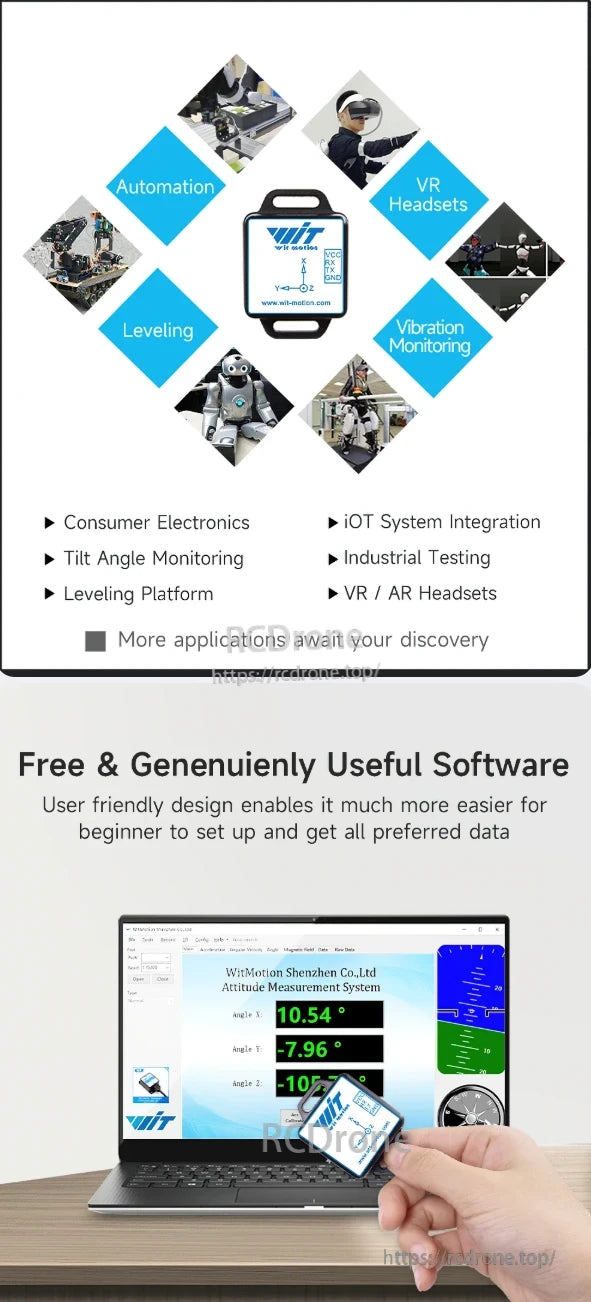
Automatiki &na roboti, uangalizi wa pembe ya mwelekeo, kuweka sawa majukwaa, uangalizi wa mtetemo, kujaribu viwandani, uunganisho wa IoT, vichwa vya VR/AR.
Maelezo

IMU yenye gharama nafuu yenye usahihi wa 0.05° katika aksisi za X Y.Vipengele vinajumuisha mwelekeo, mtetemo, na upimaji wa hali kwa kutumia Algorithimu ya Fusion ya WitMotion. Inajumuisha kasi, gyroscope, pembe, mtetemo, uchujaji wa Kalman, na kazi za MCU.
Sensor ya WitMotion WT61C inatoa kasi ya axisi 3 na gyroscope yenye anuwai ya ±16g/±2000°/s, azimio la 0.0005g, interface ya TTL/RS232, kiwango cha baud cha 9600/115200bps, operesheni kutoka -40°C hadi 85°C, na vipimo vya 51.3×36.1×15mm.
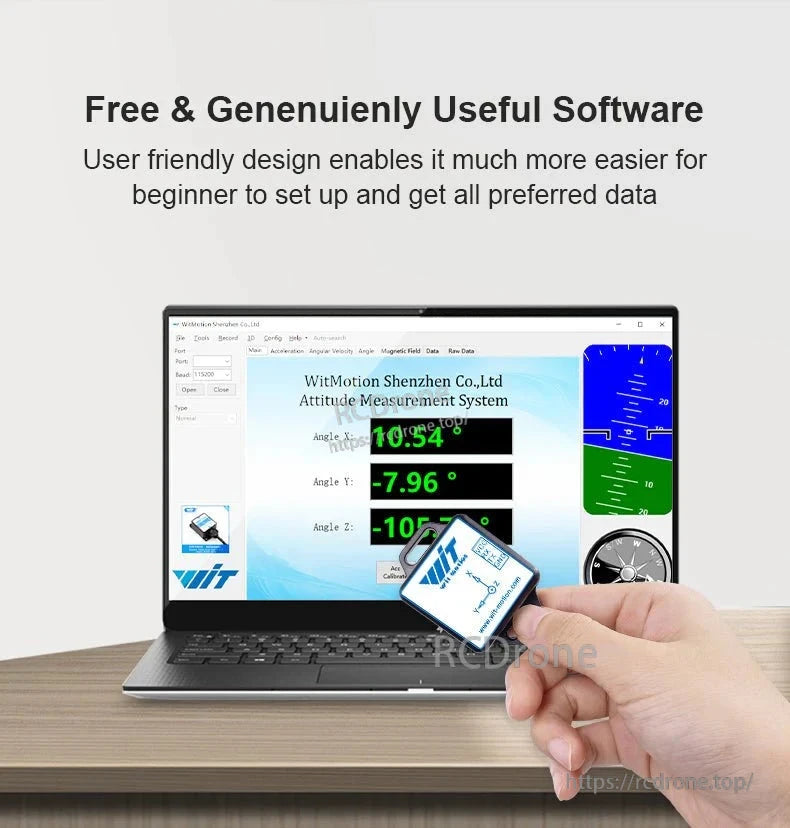
Sensor ya accelerometer ya WitMotion WT61C inaruhusu automatisering, vifaa vya VR, usawa, na ufuatiliaji wa mtetemo. Inajumuisha programu ya bure kwa urahisi wa usanidi, ikionyesha data za hali kwa wakati halisi na interface rafiki kwa watumiaji kwa vifaa vya kielektroniki, IoT, majaribio ya viwandani, na matumizi mengine zaidi.
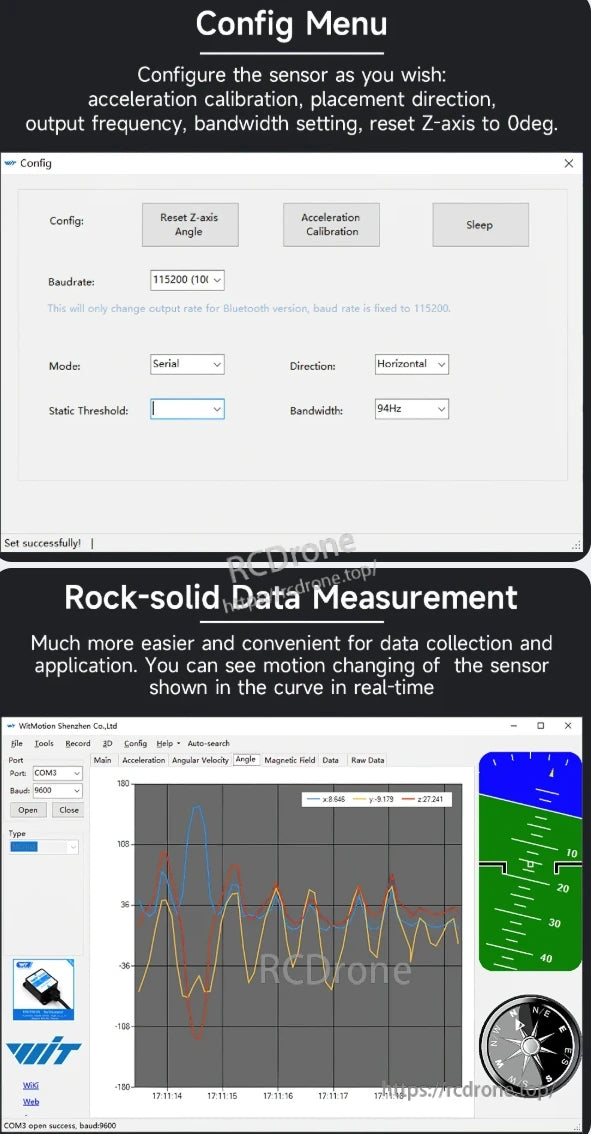
Sensor inayoweza kubadilishwa na kalibrishaji ya kasi, kuweka mwelekeo, na upimaji wa data kwa wakati halisi.Vipengele vinajumuisha upya wa Z-axis, marekebisho ya bandwidth, na onyesho la mwelekeo wa harakati za moja kwa moja kwa ufuatiliaji na uchambuzi sahihi.
WitMotion WT61C inatoa usahihi wa juu katika kugundua harakati na usafirishaji wa data kwa faili za TXT, uonyeshaji wa 3D kwa uchambuzi wa harakati wa kueleweka, na urahisi wa kuunganishwa na MCU kupitia kiunganishi cha TTL.

Vifaa vya Maendeleo kwa WitMotion WT61C vinajumuisha programu, madereva, na nyaraka za STM32, Arduino, Windows, na Matlab. Vinajumuisha SDK, mwongozo, karatasi za data, video za onyesho, na msaada wa programu ya Android.
WitMotion sensor ya WT61C inatoa itifaki ya pato la pembe yenye roll, pitch, yaw, toleo la firmware, na checksum. Inakuja na fomula za hesabu, nyaraka, nyaya, na lebo ya QC.
Related Collections