WitMotion WT901B AHRS (MPU9250) IMU ya Mhuri 10 na Barometeri, Kihisi cha Mwinuko, Accelerometeri ±16g, Gyro ±2000°/s, Kichujio cha Kalman, UART/I²C, Matokeo 0.2–200 Hz
WitMotion WT901B AHRS (MPU9250) IMU ya Mhuri 10 na Barometeri, Kihisi cha Mwinuko, Accelerometeri ±16g, Gyro ±2000°/s, Kichujio cha Kalman, UART/I²C, Matokeo 0.2–200 Hz
WitMotion
Couldn't load pickup availability
Muhtasari
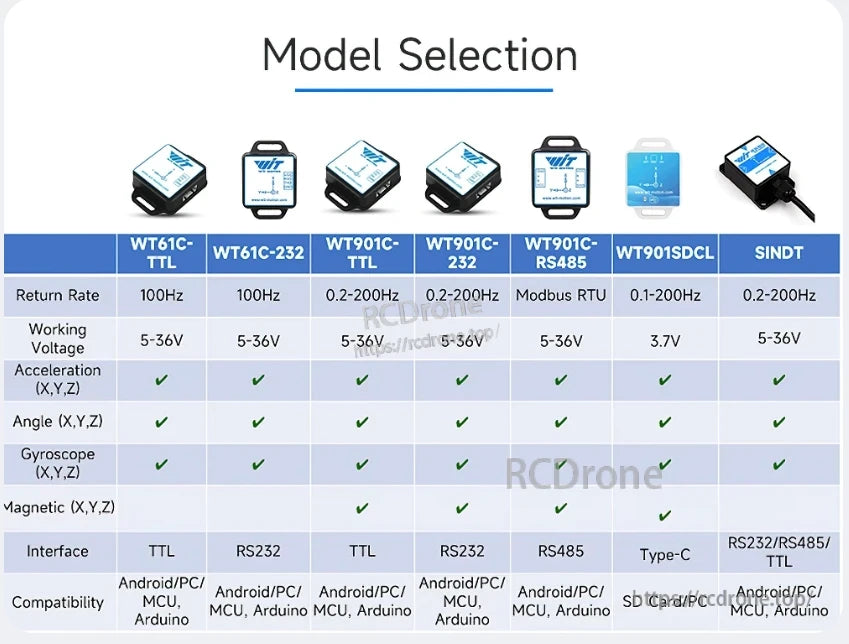
WitMotion WT901B AHRS (MPU9250) inajumuisha accelerometer ya mwelekeo 3, gyroscope ya mwelekeo 3, magnetometer ya mwelekeo 3, na barometer ili kutoa pembe, kasi, kasi ya mwelekeo, uwanja wa magnetic, shinikizo la hewa na urefu. MCU ya 48 MHz yenye udhibiti wa LDO na algorithm ya fusion + Kalman filter inatoa matokeo ya chini ya kelele na thabiti kwa roboti, ufuatiliaji wa muundo, mashine za rununu, na vifaa vya VR/vitengo vya watumiaji.
Vipengele Muhimu
-
10-axis IMU + barometer yenye hesabu ya urefu ( usahihi wa kulinganisha ±0.06 hPa)
-
Usahihi wa pembe: X/Y 0.05° (static), 0.1° (dynamic); Yaw 1° (imepimwa, interference ya chini)
-
Matokeo yanayoweza kubadilishwa 0.2–200 Hz; kuanzisha ≈ 1000 ms
-
Interfaces: UART (4800–230400 bps), I²C (open-drain; inahitaji 4.7 kΩ pull-ups)
-
Ugavi 3.3–5.5 V, kawaida 12 mA @5 V, usingizi 15 µA
-
Imara: −40–85 °C kufanya kazi, 20,000 g upinzani wa mshtuko
-
Programu ya bure ya Windows (mipangilio ya wakati halisi, kuandika kwenye TXT), kalibrishaji ya kichawi, onyesho la 3D (chanzo kinapatikana kwa ombi)
-
Vyeti: Ripoti ya kalibrishaji, RoHS, CE, ISO9001
Maelezo ya Pembe ya Roll/Pitch
| Kigezo | Hali | Kawaida |
|---|---|---|
| Kiwango | — | X: ±180°, Y: ±90° |
| Uelekeo | Imara / Dhamira | 0.1° / 0.5° |
| Ufafanuzi | Usawa | 0.0055° |
| Temp Drift | −40–85 °C | ±0.5–1° |
Maelezo ya Kichwa (Yaw)
| Item | Hali | Kawaida |
|---|---|---|
| Kiwango | — | Z: ±180° |
| Ufafanuzi | Usawa | 0.0055° |
| Usahihi& | 9-axis (dynamiki/statiki) | 1° (imepimwa, mbali na ushawishi) |
| 6-axis (statiki) | 0.5° makosa ya jumla ya kiunganishi |
Maelezo ya Kitaalamu ya Sensor
Accelerometer
| Kiwango | Ufafanuzi | RMS Noise (100 Hz) | Static Drift | Temp Drift | Bandwidth |
|---|---|---|---|---|---|
| ±16 g | 0.0005 g/LSB | 0.75–1 mg-rms | ±20–40 mg | ±0.15 mg/°C | 5–256 Hz |
Gyroscope
| Kiwango | Ufafanuzi | RMS Noise (100 Hz) | Static Drift | Temp Drift | Bandwidth |
|---|---|---|---|---|---|
| ±2000 °/s | 0.061 (°/s)/LSB | 0.028–0.07 (°/s)-rms | ±0.5–1 °/s | ±0.005–0.015 (°/s)/°C | 5–256 Hz |
Magnetometer & Barometer
| Kiwango cha Magnetometer | Ufafanuzi wa Magnetometer | Kiwango cha Barometer | RMS Noise | Usahihi wa Kihusishi |
|---|---|---|---|---|
| ±2 Gauss | 0.0667 mGauss/LSB | 300–1100 hPa | 0.5 Pa-RMS | ±0.06 hPa |
Moduli & Umeme
| Item | Min | Default | Max |
|---|---|---|---|
| Kiwango cha Kutoka | 0.2 Hz | 10 Hz | 200 Hz |
| Voltage ya Kuingia | 3.3 V | 5 V | 5.5 V |
| Upeo wa Sasa (5 V) | — | 12 mA | — |
| Upeo wa Kulala (5 V) | — | 15 µA | — |
| Joto la Kufanya Kazi | −40 °C | — | 85 °C |
| Joto la Hifadhi | −40 °C | — | 100 °C |
Vipimo & Pinout
Ukubwa (mm): A 15.24 × B 15.24 × C 2.54 × D 12.7 × E 2
Axes: X→kulia, Y→juu, Z→nje ya PCB (kanuni ya mkono wa kulia)
Pins (1–12):
D0, VCC(3.3–5 V), RX(TTL ndani), TX(TTL nje), GND, D1(usaidizi wa GPS), D2(alamu/reset ya X+), VCC, SCL(alamu ya Y+), SDA(alamu ya Y−), GND, D3(alamu ya X−)
Muunganisho & Zana
-
UART TX↔ RX kuunganishwa kwa MCU
-
I²C na 4.7 kΩ pull-ups kwenye SCL/SDA
-
GPS ya Nje (NMEA-0183) wiring ili kujenga usafiri wa GPS-IMU (inatoa latitudo/longitudo, urefu, mwelekeo, kasi, uhamaji)
Programu & Seti za Maendeleo
Windows PC suite kwa ajili ya usanidi, kalibrishaji (accel/mag/angle/height), uchaguzi wa upana/kasi, na logging ya raw/curve. Rasilimali za mfano kwa Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#; CH340/CP2102 madereva; programu ya Android; video za onyesho; Manual.pdf & Datasheet.pdf.
Maombi
Ufuatiliaji wa mazingira wa IoT, ufuatiliaji wa daraja, roboti &otomatiki, forklifts na mashine za kubebea, uchimbaji, elektroniki za watumiaji, vifaa vya VR.
Maelezo

Barometa ya AHRS yenye gharama nafuu inatoa usahihi wa juu kwa pembe ya Z-Axis, Inclination, na Shinikizo la Hewa, pamoja na Kasi, Pembe ya Gyro, Kimo cha Magnetic, na Vipimo vya Shinikizo la Hewa.

WitMotion WT901B AHRS IMU inajumuisha accelerometer, gyroscope, magnetometer, na barometer. Inatoa ±16g, ±2000°/s, ±2 Gauss, 300-1100hPa. Upeo wa juu, kelele ya chini, upana mpana wa bendi, uthabiti wa joto -40°C hadi +85°C.

AHRS IMU WT901B inatoa ±180° roll/pitch/yaw, 0.0055° resolution, 1° usahihi, algorithm ya 9-axis, UART/IIC, 200Hz output, -40°C hadi 85°C anuwai ya joto, 3.3V-5.5V input.
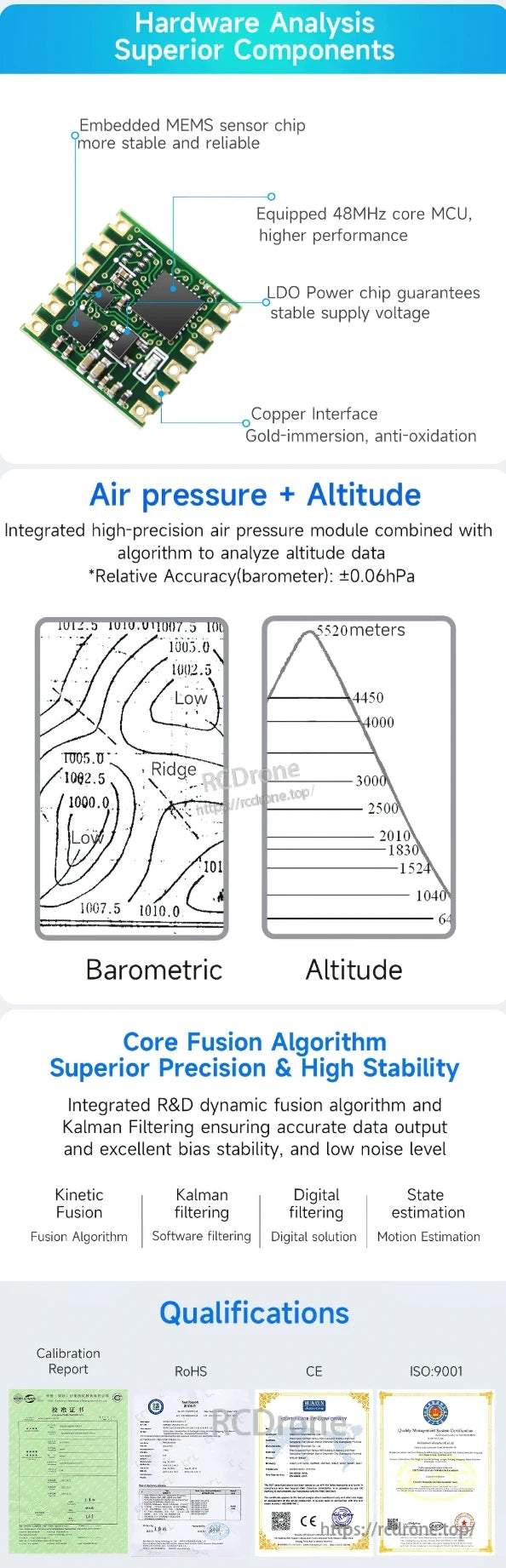
WT901B AHRS IMU ina sensa ya MEMS, MCU ya 48MHz, chip ya nguvu ya LDO, na kiunganishi cha shaba kilichozungukwa na dhahabu. Inatoa usahihi wa shinikizo wa ±0.06hPa, algorithm thabiti ya fusion, na inakidhi viwango vya RoHS, CE, na ISO:9001.

AHRS IMU WT901B inatumia WitMotion algorithm yenye chujio cha Kalman kwa usahihi wa pembe kubwa. Inafaa kwa IoT, VR, robotics, uchimbaji, madaraja, na ufuatiliaji wa mazingira.
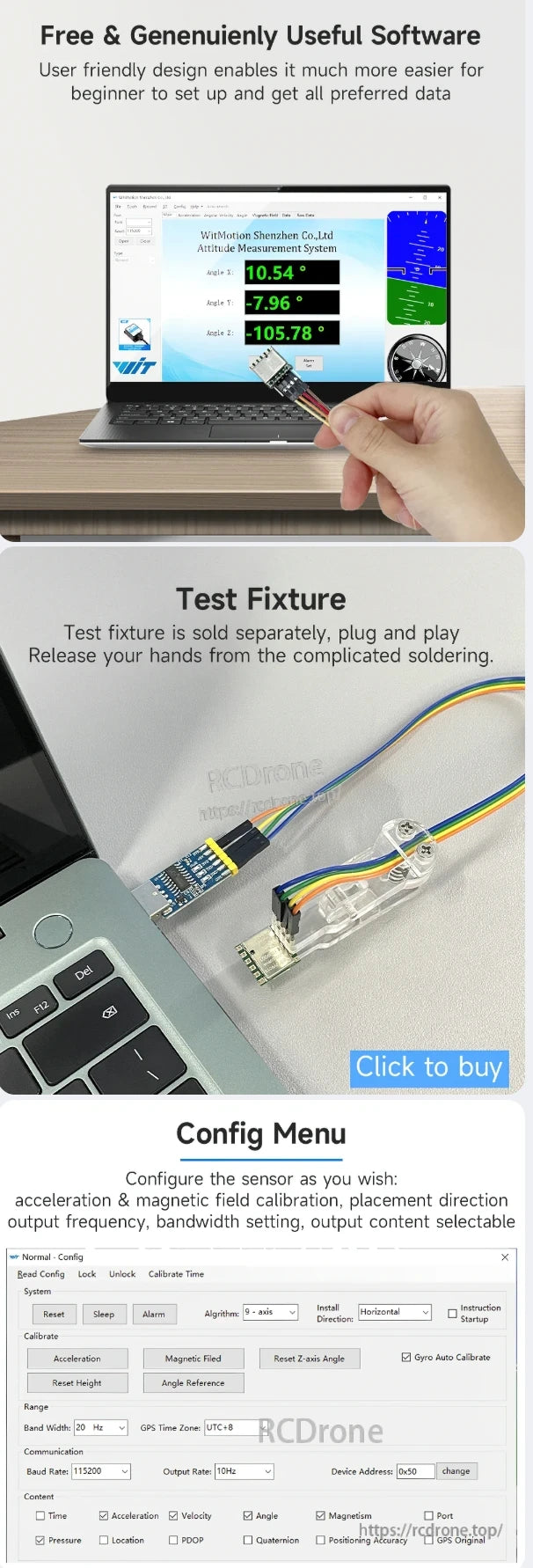
AHRS IMU WT901B inatoa programu ya bure, rafiki kwa mtumiaji, kifaa cha majaribio cha plug-and-play, na mipangilio inayoweza kubadilishwa kwa kalibrishaji, pato, na kipimo sahihi cha mwelekeo.
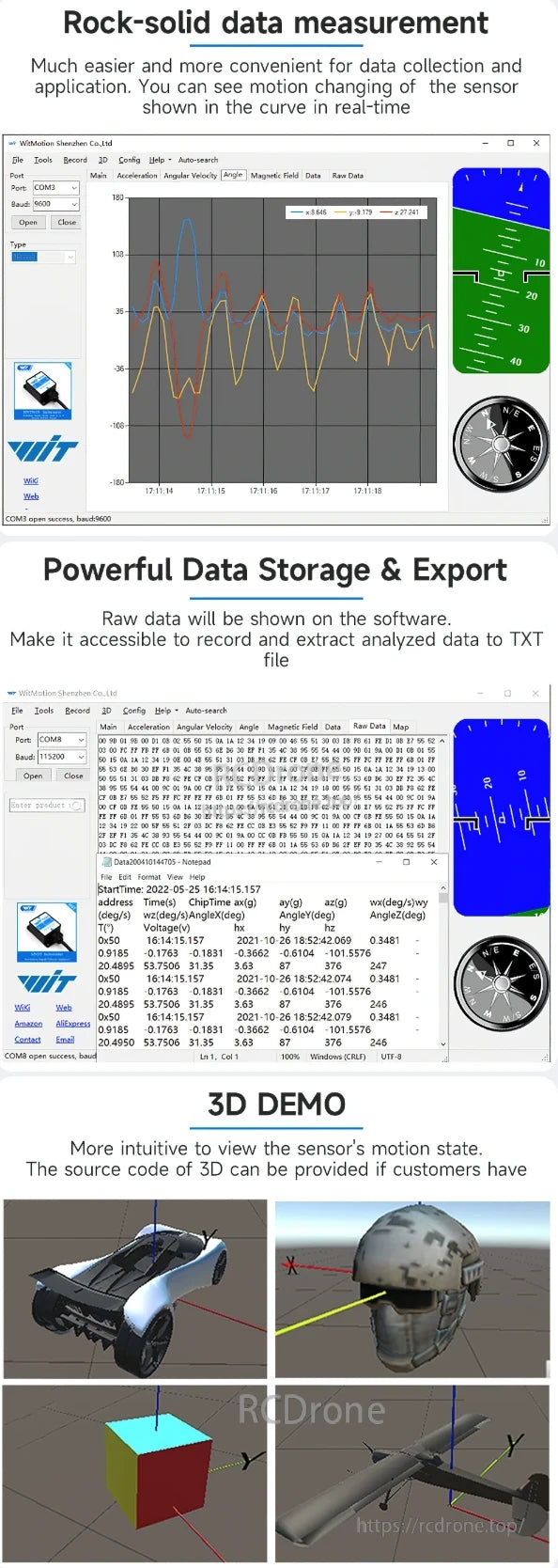
WT901B AHRS IMU inatoa kipimo cha data kwa wakati halisi, uhifadhi wenye nguvu na usafirishaji kwa faili za TXT, na uonyeshaji wa mwendo wa 3D wa kueleweka. Vipengele vinajumuisha kasi, kasi ya pembe, data ya uwanja wa sumaku, na onyesho la kompasu kwa ufuatiliaji sahihi wa sensa.

AHRS IMU WT901B inatoa kalibrishaji ya kichwa cha mvuto, muunganisho wa TTL/IIC MCU, ufanisi wa GPS. Inatoa latitudo, longitudo, urefu, mwelekeo, kasi, na uhamaji kwa ajili ya urambazaji.
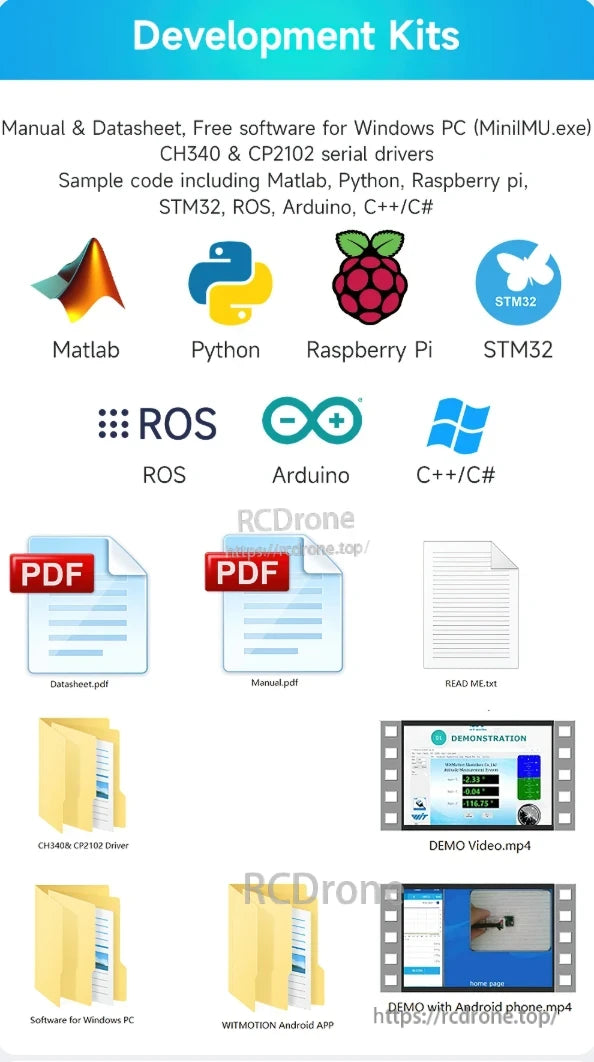
Vifaa vya Maendeleo vinajumuisha mwongozo, karatasi ya data, programu ya Windows, madereva ya CH340 & CP2102, mfano wa msimbo kwa Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#, na video za onyesho kwa Android na PC.
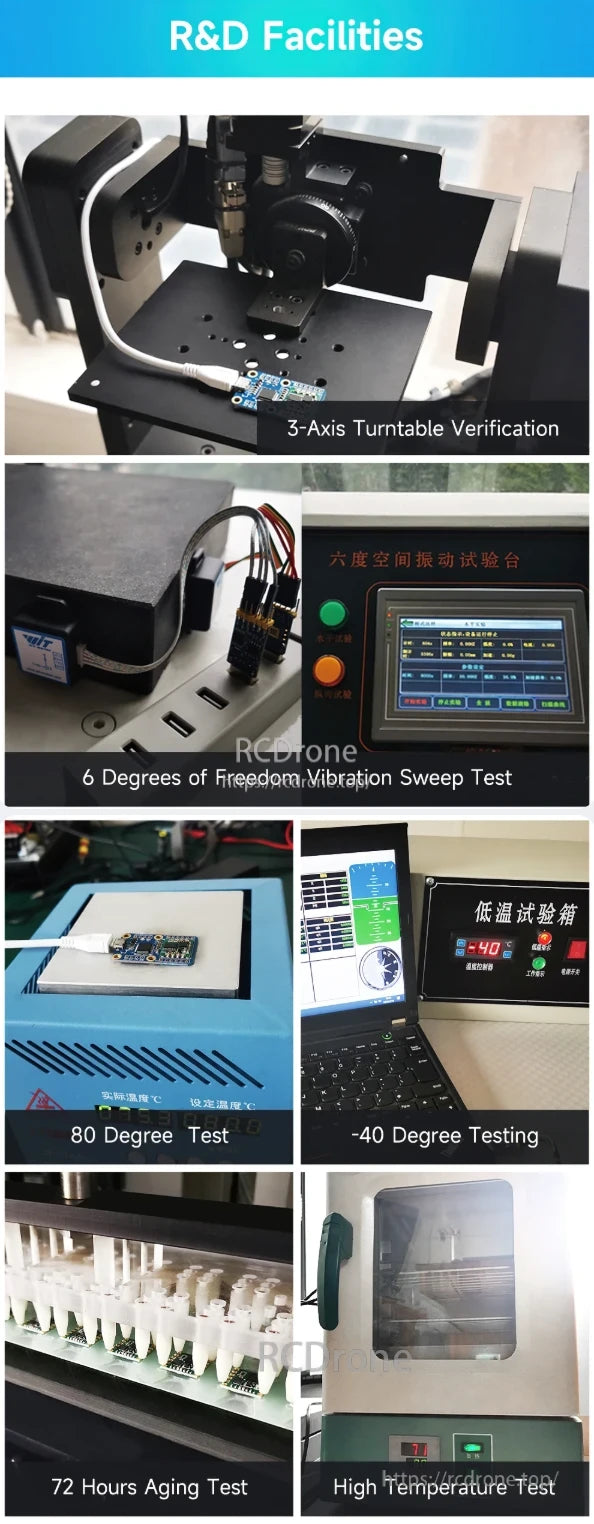
WT901B AHRS IMU hupitia majaribio makali: meza ya kuzunguka ya 3-axis, 6 DOF vibration, joto kali (80°C hadi -40°C), kuzeeka kwa saa 72, na tathmini za joto la juu.
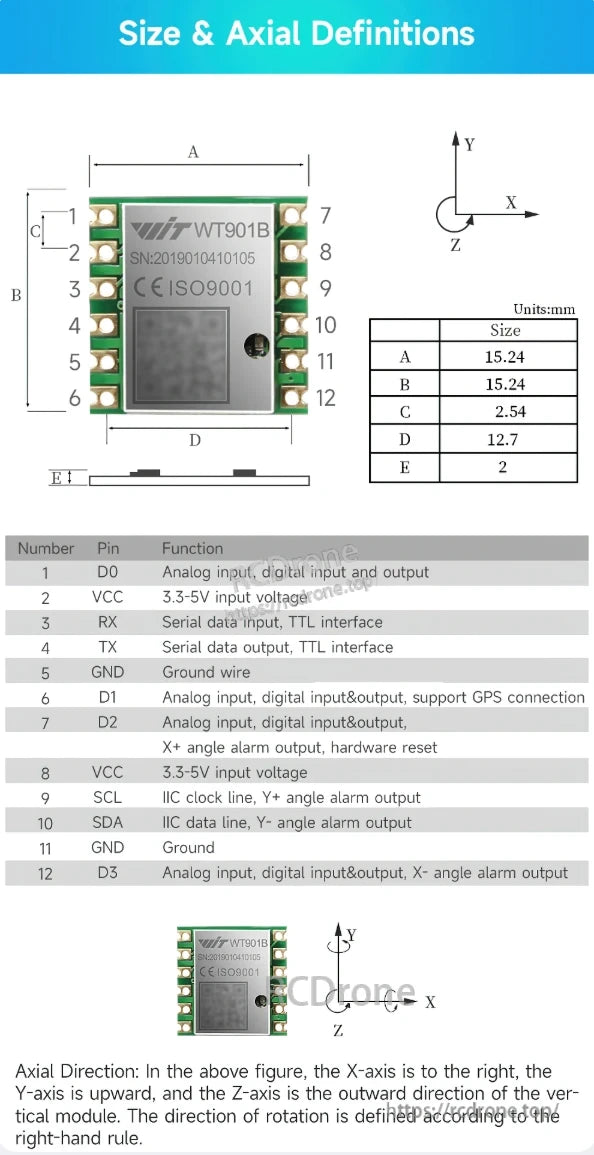
Vipimo vya WT901B AHRS IMU: 15.24×15.24×2.54 mm, mpangilio wa pini 12 wenye analog/digital I/O, UART, I2C, na matokeo ya alama. Mwelekeo wa axial umeelezwa kwa sheria ya mkono wa kulia; X kulia, Y juu, Z nje.

AHRS IMU WT901B kutoka WITMotion inajumuisha moduli ya sensor, katalogi, kadi ya matangazo yenye nambari za QR kwa hati na msaada.
Related Collections