












WitMotion WT901C-485 IMU ya Osi 9, Accelerometer, Gyroscope, Digital Compass (RS485/RS232/TTL), Usahihi wa Pembe 0.05°, 0.2–200 Hz AHRS
WitMotion WT901C-485 IMU ya Osi 9, Accelerometer, Gyroscope, Digital Compass (RS485/RS232/TTL), Usahihi wa Pembe 0.05°, 0.2–200 Hz AHRS
RCDrone
Couldn't load pickup availability
Muhtasari
WitMotion WT901C-485 ni kifaa kidogo cha 9-axis AHRS IMU kilichotengenezwa kwa kutumia sensa ya triaxial MPU9250-class (accelerometer + gyroscope + magnetometer) na algorithimu ya fusion/Kalman ya WitMotion. Inatoa pembe, kasi, kasi ya angular, uwanja wa magnetic, na quaternion matokeo yenye usahihi wa XY wa 0.05° (dynamiki 0.1°) na 0.2–200 Hz kiwango cha sasisho kinachoweza kubadilishwa. Interfaces nyingi za kimwili (RS485/RS232 Modbus & TTL UART) na anuwai pana za ingizo zinafanya WT901C-485 iwe rahisi kuunganishwa na Arduino/STM32/MCUs, PCs, na wadhibiti wa viwandani. Programu rasmi ya Windows (MiniIMU.exe) inatoa grafu za wakati halisi, demo ya 3D, usajili/kuhamasisha data, na urekebishaji wa magnetic wa kuona.
Vipengele muhimu
-
Matokeo ya 9-axis: pembe (Roll/Pitch/Yaw), 3-axis acc/gyro/mag, quaternion.
-
Utulivu wa juu &na usahihi: XY 0.05° static, 0.1° dynamic; utulivu wa kasi 0.01 g.
-
I/O inayoweza kubadilishwa: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (default 9,600).
-
Kiwango kinachoweza kubadilishwa: 0.2–200 Hz (default 10 Hz).
-
Ugavi mpana: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA ya kawaida.
-
Vifaa &na SDKs: programu ya Windows, programu ya Android, madereva wa CH340/CP2102, mfano wa msimbo kwa C/C++/STM32/Arduino/Matlab.
-
Kurekebisha kwa sumaku &na onyesho la 3D kwa usanidi wa mara ya kwanza; michoro ya moja kwa moja na usafirishaji wa TXT.
-
Muundo wa viwanda: –40~85 °C, 51×36×15 mm, usakinishaji wima au usawa.
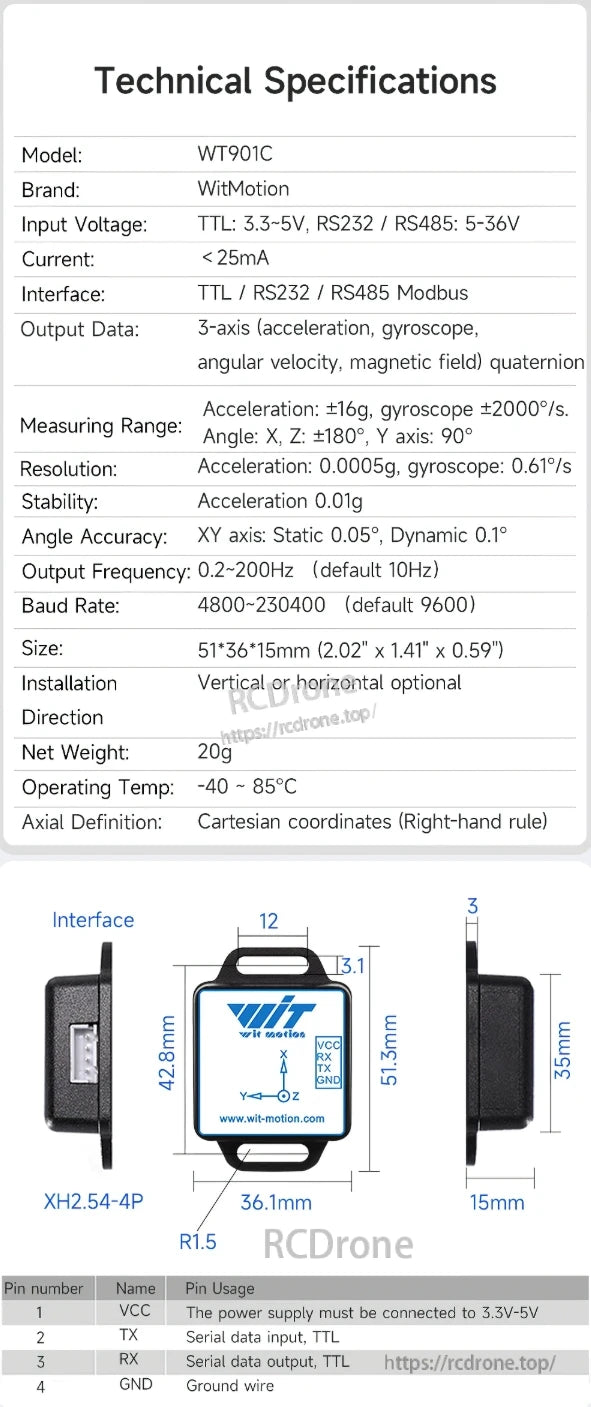
Maelezo ya kiufundi
| Item | Spec |
|---|---|
| Mfano | WT901C (toleo la WT901C-485) |
| Viunganisho | TTL / RS232 / RS485 (Modbus) |
| Voltage ya kuingiza | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Current | < 25 mA |
| Data ya pato | Kuongeza kasi, kasi ya pembe, uwanja wa magnetic, angle, quaternion |
| Mikondo ya kupimia | Acc ±16 g, Gyro ±2000 °/s; Angle: X,Z ±180°, Y 90° |
| Ufafanuzi | Acc 0.0005 g, Gyro 0.61 °/s |
| Utulivu | Kuongeza kasi 0.01 g |
| Usahihi wa pembe | XY static 0.05°, dynamic 0.1° |
| Masafa ya pato | 0.2–200 Hz (default 10 Hz) |
| Kiwango cha baud | 4,800–230,400 (default 9,600) |
| Ukubwa / uzito | 51×36×15 mm, 20 g |
| Joto la kufanya kazi | –40 ~ 85 °C |
| Axes | Cartesian, sheria ya mkono wa kulia |
| Usanidi | Wima au usawa |
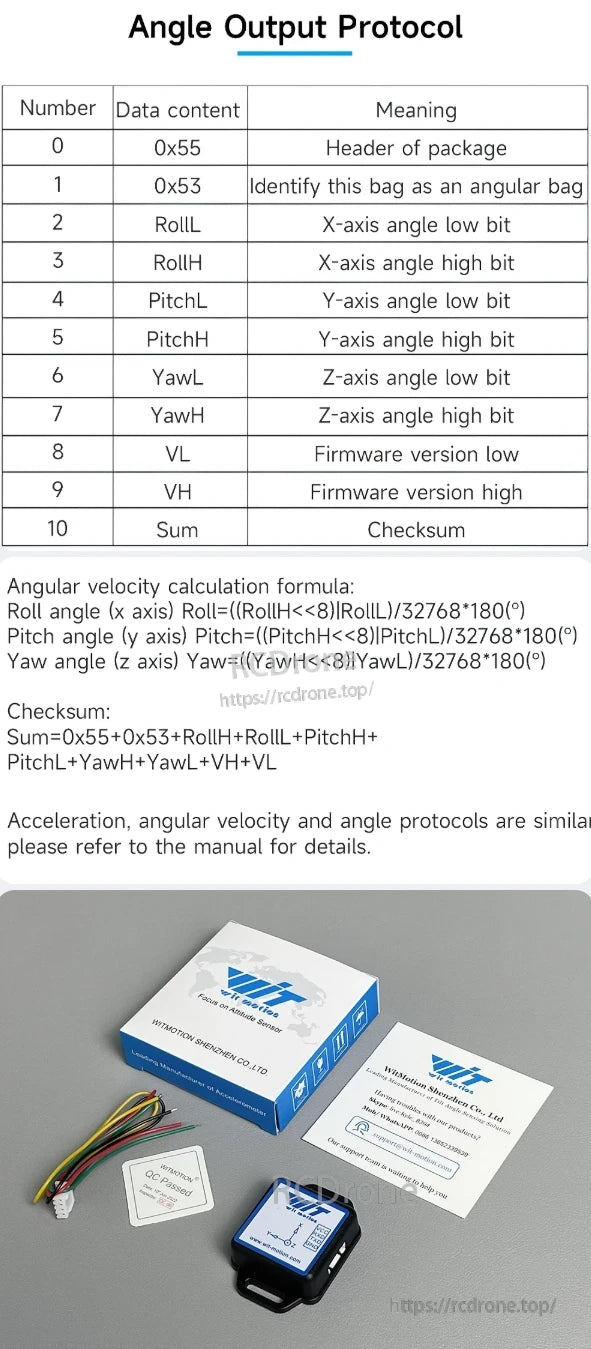
Frame ya pembe (0x55 0x53) – itifaki ya pato
| Index ya byte | Maudhui | Maana |
|---|---|---|
| 0 | 0x55 | Kichwa cha pakiti |
| 1 | 0x53 | ID ya frame ya “Angle” |
| 2–3 | RollL/RollH | X-axis angle (low/high) |
| 4–5 | PitchL/PitchH | Y-axis angle (low/high) |
| 6–7 | YawL/YawH | Z-axis angle (low/high) |
| 8 | VL | Firmware version low |
| 9 | VH | Firmware version high |
| 10 | Sum | Checksum |
Kufasiri pembe
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Jumla = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Frames za kasi na mwendo wa pembe zinafuata mtindo sawa—angalia mwongozo.)
Vipimo &na Kiunganishi
Ukubwa wa kifuniko: 51 × 36 × 15 mm (K × W × D), ikiwa na masikio ya kufunga; uzito ≈ 20 g.
Kiunganishi: XH2.54-4P (kichwa cha bodi kwenye sensor).
Pinout (toleo la TTL)
| Pin | Jina | Maelezo |
|---|---|---|
| 1 | VCC | Ingizo la nguvu 3.3–5 V |
| 2 | TX | Ingizo la data ya serial, kiwango cha TTL |
| 3 | RX | Toleo la data ya serial, kiwango cha TTL |
| 4 | GND | Ardhi |
Maelezo: Tumia viwango vya TTL kwa ushirikiano wa moja kwa moja na MCU. Mifano ya RS232/RS485 hutumia viwango vyao vya voltage na viwango vya wiring.
Programu &na zana
-
MiniIMU.exe (Windows): usanidi (algorithms, mwelekeo wa usakinishaji, mipaka, upana wa bendi), grafu za wakati halisi, mtazamo wa raw/hex, kurekodi data na TXT usafirishaji.
-
Onyesho la 3D: onyesha mwelekeo kwa wakati halisi (chanzo kinapatikana).
-
Kalibrishaji ya mvutano wa kuona: msaidizi wa kuunda mduara ili kuondoa upendeleo (inapendekezwa kwa matumizi ya kwanza).
-
Madereva &na msimbo: madereva ya CH340/CP2102; mifano kwa STM32, Arduino, C/C++, Matlab; programu ya Android; video za maonyesho ya PC/simu.
Matumizi ya kawaida
Automatiki na roboti, kuimarisha majukwaa, ufuatiliaji wa pembe ya mwelekeo, ufuatiliaji wa mtetemo, elektroniki za watumiaji, ujumuishaji wa mfumo wa IoT, upimaji wa viwandani, vifaa vya VR/AR.
Maelezo

AHRS IMU yenye gharama nafuu yenye usahihi wa 0.05° katika axisi za X Y. Inajumuisha uelekeo, mtetemo, ufuatiliaji wa hali kwa kutumia Algorithimu ya Fusion ya WitMotion. Inajumuisha kazi za kasi, gyroscope, pembe, mvutano, uchujaji wa Kalman, na kazi za quaternion.
Sensor ya WitMotion WT901C IMU inatoa kasi ya axisi 3, gyroscope, kasi ya pembe, na upimaji wa uwanja wa magnetic. Inasaidia interfaces za TTL/RS232/RS485, ina anuwai ya kasi ya ±16g, gyro ya ±2000°/s, usahihi wa pembe ya statiki wa 0.05°, na inafanya kazi kati ya -40°C na 85°C.

Sensor ya WitMotion WT901C IMU inatoa automatisering, vifaa vya VR, usawa, na ufuatiliaji wa mtetemo. Maombi ni pamoja na elektroniki za watumiaji, uunganisho wa IoT, upimaji wa viwanda, na AR/VR. Programu ya bure inatoa kipimo cha mtindo wa kirafiki kwa data ya pembe ya wakati halisi.
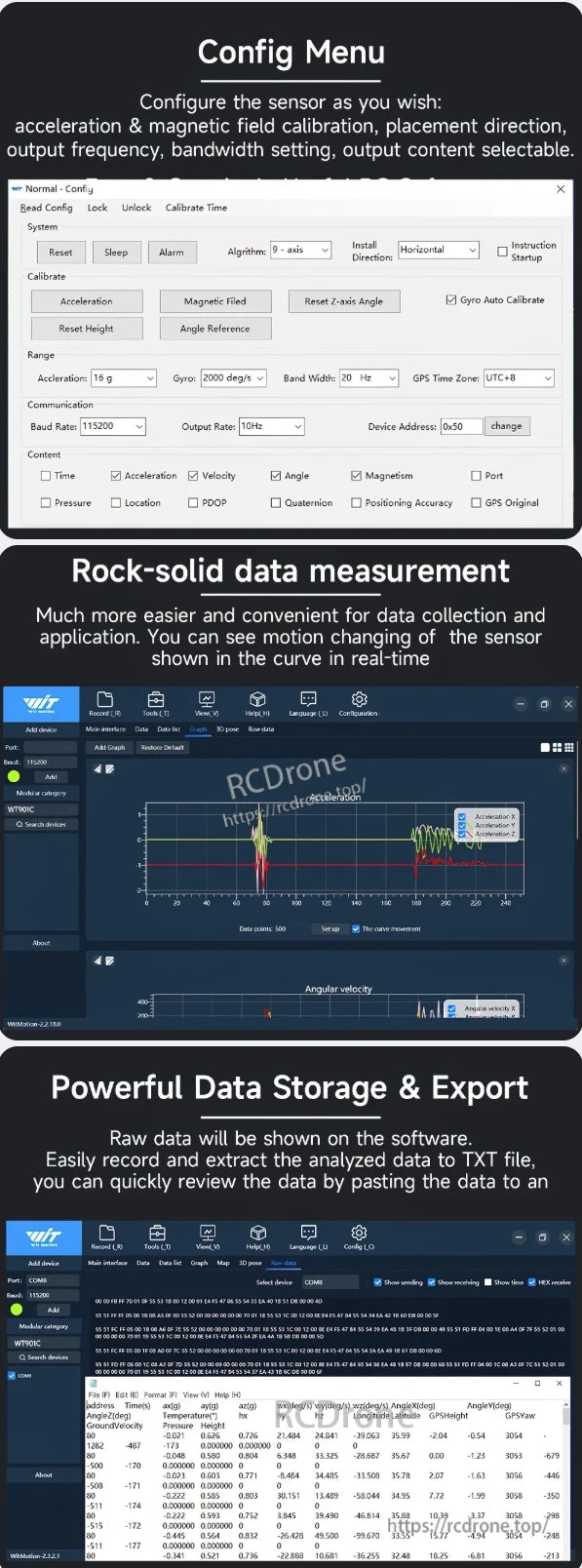
Sensor ya WitMotion WT901C IMU inatoa mipangilio inayoweza kubadilishwa kwa kasi, uwanja wa magnetic, na mwelekeo. Inatoa uonyeshaji wa data wa wakati halisi, upimaji thabiti, na inasaidia uhifadhi/kuhamasisha data katika muundo wa TXT kwa uchambuzi.
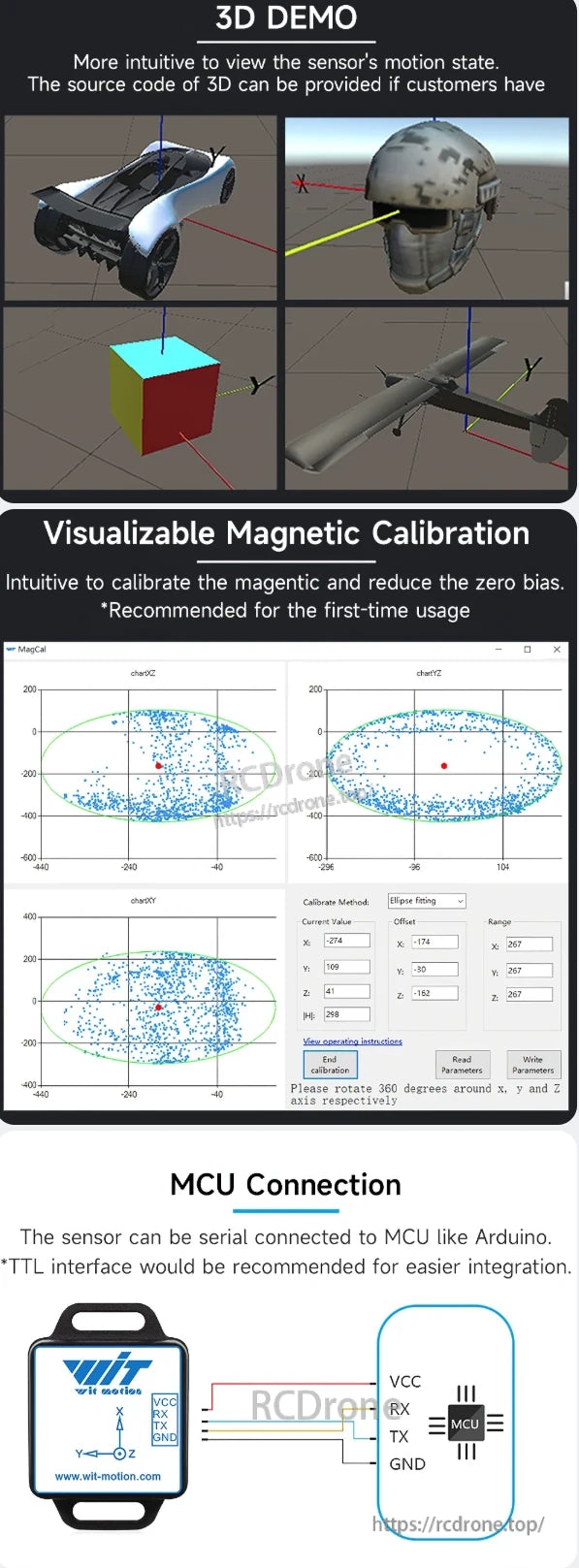
Onyesho la 3D linaonyesha mwendo wa sensor kwa kutumia magari, kofia, cube, na mifano ya drone. Kiolesura cha kalibra ya sumaku kinaruhusu marekebisho ya kiufundi. Maelezo ya muunganisho wa MCU yanaonyesha kiolesura cha TTL kwa Arduino, pamoja na pini zilizoorodheshwa za VCC, RX, TX, GND.

Vifaa vya Maendeleo vinajumuisha programu ya bure ya Windows, madereva, mwongozo, na mifano ya msimbo kwa STM32, Arduino, C++, MATLAB. Inajumuisha PDFs, video za onyesho, na msaada wa programu ya Android kwa Sensor ya IMU WT901C.
Maelezo ya itifaki ya pato la pembe ya sensor ya IMU WT901C: muundo wa data, hesabu za pembe, fomula ya checksum, ufungaji. Inajumuisha pembe za roll, pitch, yaw, toleo la firmware, na checksum.
Related Collections












