









WitMotion WT901C 9-Axis AHRS IMU — Kipima Mvuto, Gyroscope, Magnetometer na Pembe & Quaternion, Usahihi wa 0.05°, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-Axis AHRS IMU — Kipima Mvuto, Gyroscope, Magnetometer na Pembe & Quaternion, Usahihi wa 0.05°, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Couldn't load pickup availability
Overview
WitMotion WT901C ni AHRS IMU ndogo wa axisi 9 ambao unachanganya accelerometer ya axisi 3, gyroscope ya axisi 3, na magnetometer ya axisi 3 pamoja na mchanganyiko wa WitMotion/Kalman filtering kutoa mwelekeo (roll/pitch/yaw), kasi ya angular, kasi, uwanja wa magnetic, na quaternion. Inatoa usahihi wa XY wa 0.05° wa static (0.1° dynamic), inasaidia 0.2–200 Hz viwango vya sasisho, na inawasiliana kupitia TTL, RS232, au RS485 (Modbus)—inayofaa kwa kipimo cha mwelekeo, vibration, na hali katika automatisering, majukwaa ya usawa, VR/AR, na majaribio ya viwandani.
Vipengele muhimu
-
Usahihi wa juu AHRS: XY static 0.05°, dynamic 0.1°; axisi za Cartesian za mkono wa kulia.
-
I/O pana & voltage: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (default 9 600).
-
Matokeo yanayoweza kubadilishwa: 0.2–200 Hz (default 10 Hz); maudhui yanayoweza kuchaguliwa na mtumiaji.
-
Data kamili ya 9-axis: Kasi, kasi ya pembe, uwanja wa sumaku, angle & quaternion.
-
Zana za uonyeshaji: Programu ya Windows MiniIMU yenye grafu za wakati halisi, usajili/kuhamasisha data ghafi (TXT), onyesho la mwendo wa 3D, na kalibrishaji ya sumaku ya kuona.
-
Rasilimali za wabunifu: Dereva (CH340/CP2102), mwongozo/kadi ya data, mfano wa msimbo kwa 51/C++/STM32/Arduino/Matlab, na programu ya Android.
-
Usakinishaji rahisi: Kuweka wima au usawa; compact 51 × 36 × 15 mm, ~20 g.
html
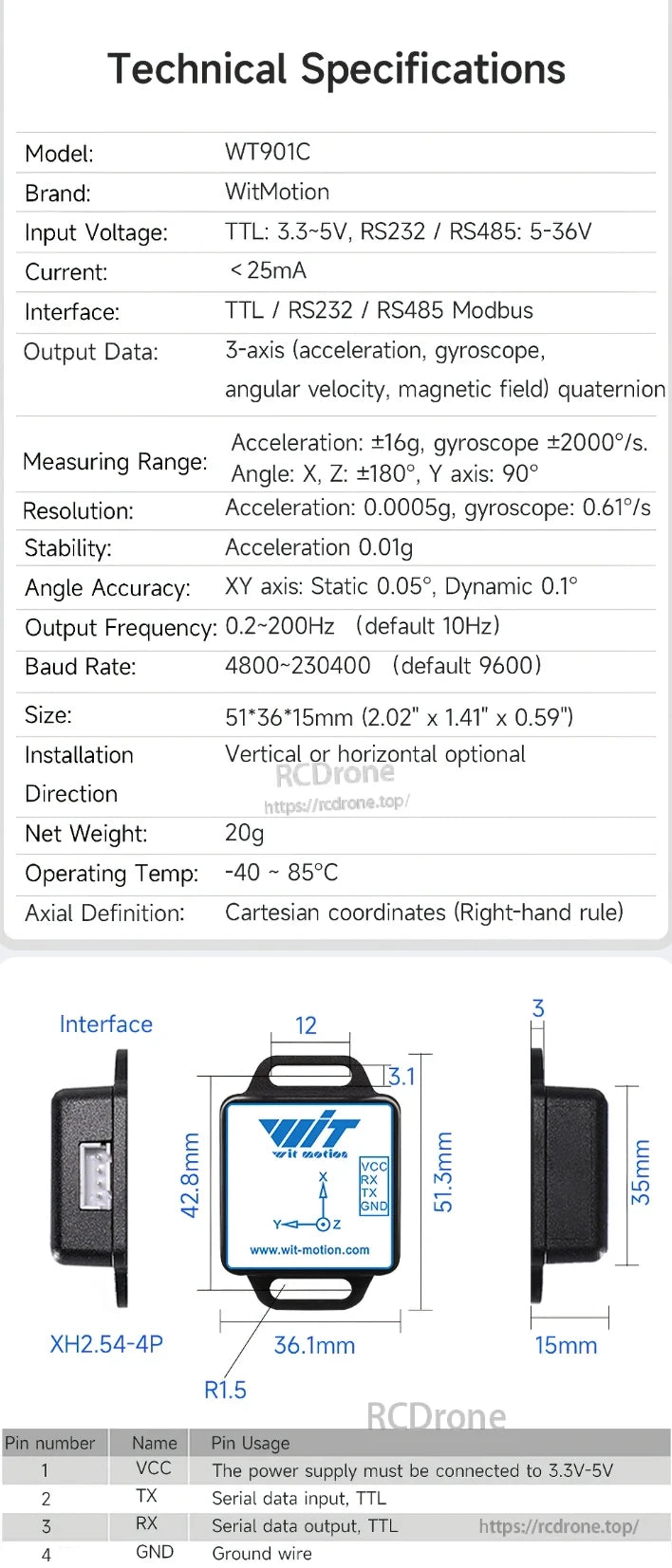
Maelezo ya kiufundi
-
Mfano/Brand: WT901C / WitMotion
-
Interfaces: TTL / RS232 / RS485 (Modbus)
-
Voltage ya kuingiza: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Current: < 25 mA
-
Data ya pato: 3-axis kuongeza kasi, gyroscope (mzunguko wa pembe), uwanja wa magnetic, pembe, quaternion
-
Kiwango cha kupima: Acc ±16 g; Gyro ±2000 °/s; Pembe X,Z ±180°, Y 90°
-
Ufafanuzi: Acc 0.0005 g; Gyro 0.61 °/s
-
Utulivu: Acc 0. 01 g
-
Usahihi wa pembe: XY static 0.05°, dynamic 0.1°
-
Masafa ya pato: 0.2–200 Hz (default 10 Hz)
-
Baud rate: 4 800–230 400 (default 9 600)
-
Ukubwa / Uzito: 51 × 36 × 15 mm / ≈ 20 g
-
Joto la kufanya kazi: −40 ~ 85 °C
-
Ufafanuzi wa mhimili: Mipangilio ya Cartesian, kanuni ya mkono wa kulia
Vipimo &na kiunganishi (toleo la TTL)
-
Mwili: 51.3 mm (H) × 36.1 mm (W) × 15 mm (D); mizunguko ya kufunga radius R1.5
-
Kiunganishi: XH2.54-4P
-
Pinout (kushoto→kulia kwenye lebo VCC/RX/TX/GND):
-
VCC — nguvu 3.3–5 V
-
TX — Ingizo la data ya serial, TTL
-
RX — Toleo la data ya serial, TTL
-
GND — ardhi
-
Kumbuka: Picha ya axis imeandikwa kwenye nyumba (X↑, Y→, Z•), kusaidia katika usawa.
Protokali ya pato la pembe (frame 0x55 0x53)
| Byte | Maudhui | Maana |
|---|---|---|
| 0 | 0x55 | Kichwa |
| 1 | 0x53 | ID ya frame ya pembe |
| 2–3 | RollL/RollH | Pembe ya mhimili wa X |
| 4–5 | PitchL/PitchH | Pembe ya mhimili wa Y |
| 6–7 | YawL/YawH | Pembe ya mhimili wa Z |
| 8–9 | VL/VH | Toleo la firmware (chini/juu) |
| 10 | Jumla | Checksum |
Kubadilisha pembe:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Mwelekeo wa kasi na mabadiliko ya pembe ni sawa; angalia mwongozo.)
Programu &na zana
-
Windows (MiniIMU.exe): usanidi wa kifaa (mipaka, upana wa bendi, kiwango cha pato), grafu za wakati halisi, muonekano wa data ghafi, 3D pose uonyeshaji, usafirishaji kwa TXT.
-
Kalibrishaji wa Mag: mchakato wa kuunda mduara wa kuona ili kupunguza upendeleo (kugeuza kuzunguka X/Y/Z).
-
Ushirikiano wa MCU: muunganisho wa moja kwa moja wa serial; TTL inapendekezwa kwa kuunganisha rahisi ya MCU (Arduino/STM32, n.k.).
-
Rasilimali zilizojumuishwa: Datasheet.pdf, Manual.pdf, madereva ya CH340 &na CP2102, mfano wa msimbo, Programu ya Android, video za onyesho.
Matumizi ya kawaida
Automatiki | Ufuatiliaji wa tilt/kiwango | Ufuatiliaji wa mtetemo | Kuweka sawa majukwaa | Uunganishaji wa mifumo ya IoT | Upimaji wa viwandani | VR/AR vifaa vya kichwa | Elektroniki za watumiaji.
Maelezo

AHRS IMU yenye gharama nafuu yenye usahihi wa 0.05° katika axisi za X na Y. Inajumuisha upimaji wa mwelekeo, mtetemo, na hali kwa kutumia Algorithimu ya Fusion ya WitMotion. Inajumuisha kuongeza kasi, gyroskopu, pembe, magnetic, uchujaji wa Kalman, na kazi za quaternion.
WitMotion WT901C IMU inatoa upimaji wa axisi 3 kwa kuongeza kasi, gyroskopu, na magnetometer. Inatoa matokeo ya quaternion. Inasaidia TTL, RS232, RS485. Inapima ±16g, ±2000°/s, ±180° pembe. Ukubwa wa kompakt 51×36×15mm. Inafanya kazi kutoka -40 hadi 85°C.

WitMotion WT901C IMU inasaidia automatisering, vifaa vya VR, usawa, na ufuatiliaji wa mtetemo. Inafanya kazi kwa vifaa vya elektroniki vya watumiaji, IoT, upimaji wa viwandani, na AR/VR. Inakuja na programu ya bure kwa kuonyesha data ya pembe kwa wakati halisi.

Menyu ya usanidi ya WitMotion WT901C IMU inaruhusu kalibrishaji ya sensor, mipangilio ya pato la data, na uonyeshaji wa harakati kwa wakati halisi. Inasaidia algorithimu ya axisi 9, kasi inayoweza kubadilishwa, gyro, upana wa bendi, na eneo la muda la GPS. Grafu za wakati halisi zinaonyesha kasi na kasi ya pembe kwa kipimo sahihi.
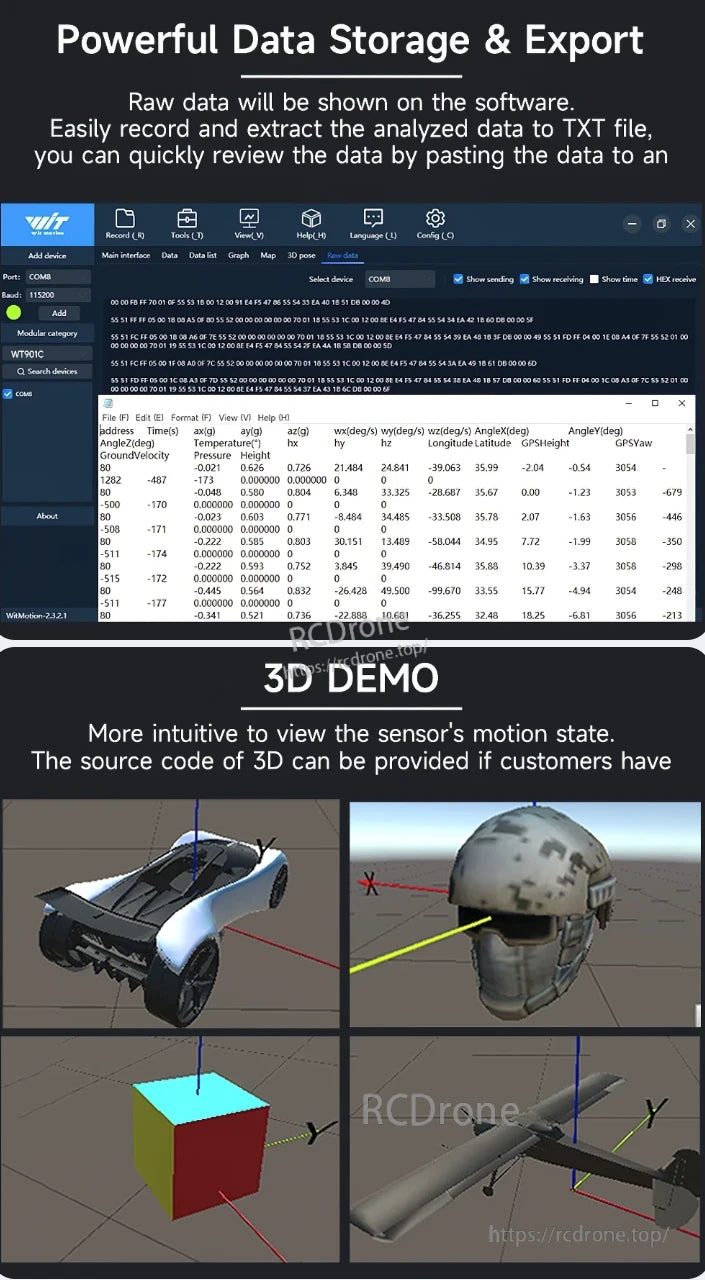
WitMotion WT901C IMU inatoa uhifadhi wa data wenye nguvu, usafirishaji rahisi wa TXT, na uonyeshaji wa harakati za 3D pamoja na msimbo wa chanzo uliopatikana.
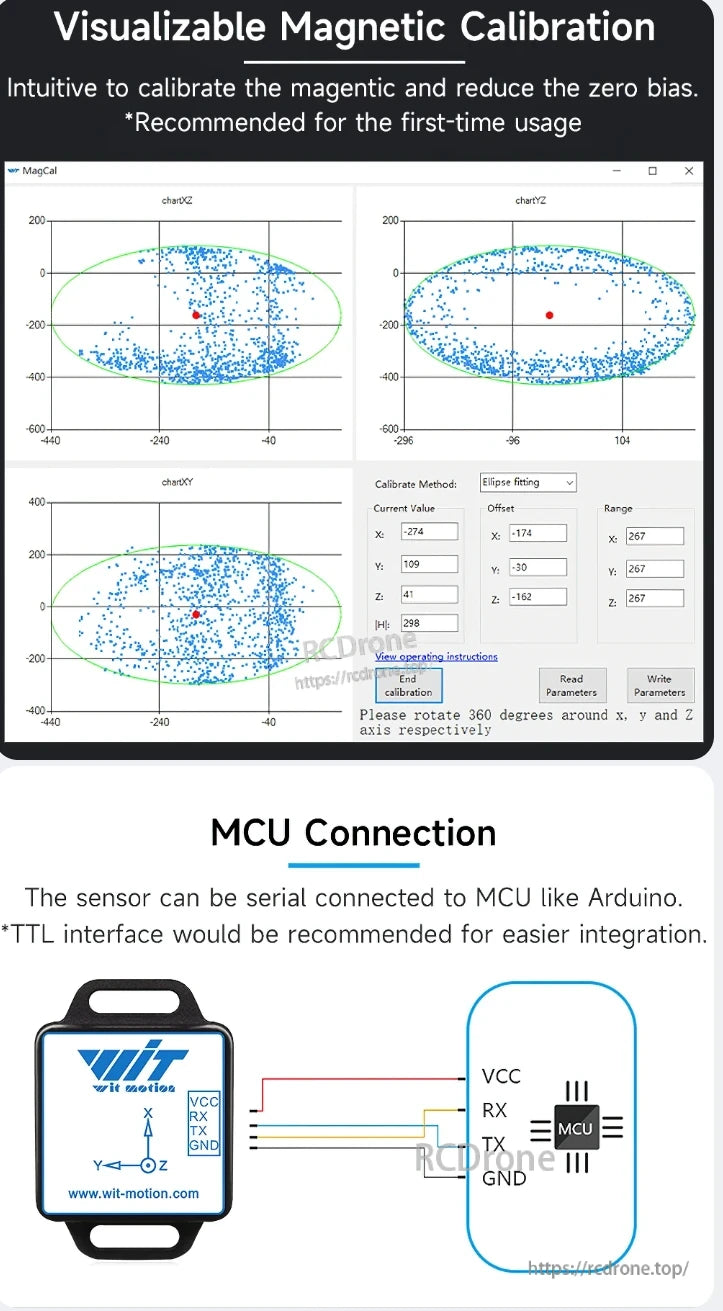
Kalibrishaji ya sumaku inayoweza kuonyeshwa kwa WT901C IMU kwa kutumia mbinu ya kufaa mduara. Muunganisho wa MCU kupitia kiunganishi cha TTL unashauriwa. Sensor inajumuika na MCUs kama Arduino kwa kutumia pini za VCC, RX, TX, GND.
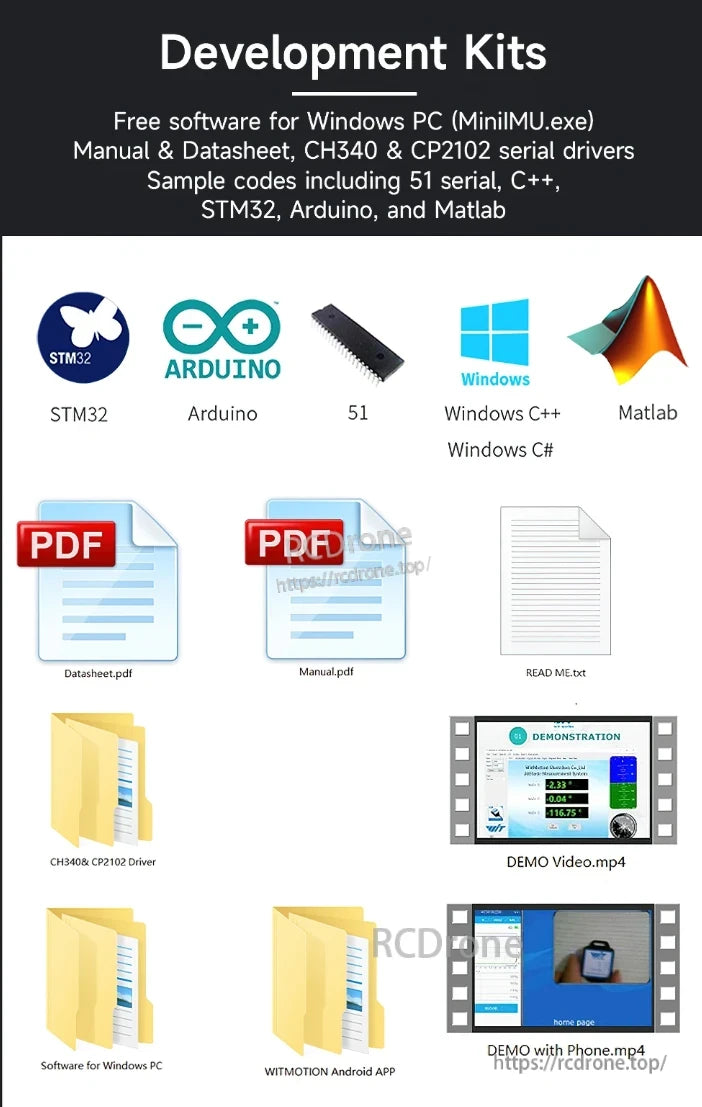
Vifaa vya Maendeleo vinajumuisha programu ya bure kwa Windows, mwongozo, karatasi ya data, madereva ya CH340 & CP2102, mifano ya msimbo kwa 51, C++, STM32, Arduino, na Matlab, pamoja na video za onyesho na programu ya Android.
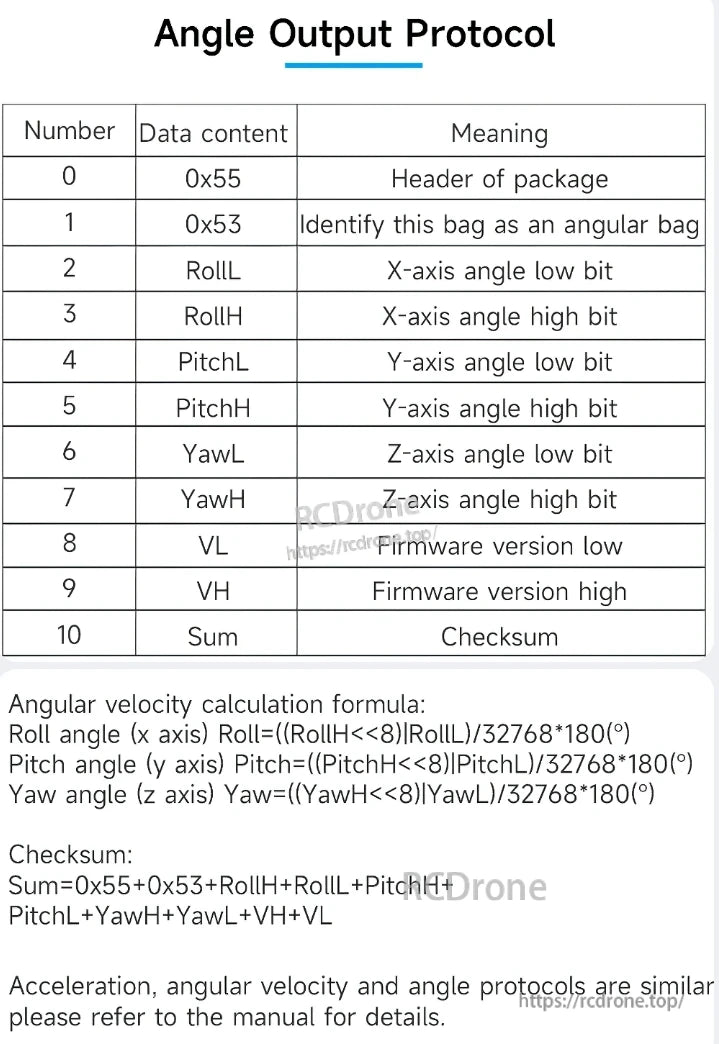
Muundo wa data kwa WT901C IMU pembe ya pato unajumuisha kichwa, roll, pitch, yaw, toleo la firmware, na checksum. Mifumo ya mahesabu na uthibitisho inatolewa. Mifumo kama hiyo inapatikana kwa kasi na kasi ya angular.
Related Collections









