








Moduli ya GPS ya WitMotion WTRTK-M ZED-F9P RTK GNSS, Uwekaji Nafasi wa Usahihi wa Sentimita kwa UAV/Gari, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
Moduli ya GPS ya WitMotion WTRTK-M ZED-F9P RTK GNSS, Uwekaji Nafasi wa Usahihi wa Sentimita kwa UAV/Gari, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Couldn't load pickup availability
Overview
WTRTK-M ni moduli ya RTK differential positioning yenye usahihi wa juu iliyojengwa kwenye u-blox ZED-F9P injini ya GNSS. Inafuatilia GPS, GLONASS, Galileo, BeiDou na QZSS kwa wakati mmoja na inatoa usahihi wa kiwango cha sentimita baada ya marekebisho ya RTK. Moduli hii inatoa mapokezi ya mawimbi mawili, matokeo ya wakati halisi ya 5 Hz kwa ajili ya ramani/maombi ya kiotomatiki, na chombo cha PC kwa usanidi wa funguo moja wa vituo vya simu/misingi na uonyeshaji wa njia. Teknolojia za kupambana na kuingiliwa na kalibrishaji zinaboresha utulivu na usalama wa data.
Vipengele Muhimu
-
RTK ya kiwango cha sentimita: mtiririko wa kazi wa simu/misingi na mkusanyiko wa haraka.
-
Multi-constellation, dual-frequency: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Uwezo wa juu wa hisia &na kuanza haraka: kanali 184; kuanza baridi sekunde 24, kuanza moto sekunde 2, kurejesha sekunde 2; kuungana ≤sekunde 10.
-
Utendaji wa wakati/mwelekeo: 1PPS RMS 30 ns (99% 60 ns); usahihi wa mwelekeo 0.4° (dynamiki 0.3°).
-
Protokali nyingi: NMEA, UBX, RTCM 3.3; awamu ya carrier (RAWX) inasaidiwa.
-
Kiwango kinachoweza kubadilishwa &na 1 PPS: 0.25–20 Hz sasisho (default 1 Hz); pulse ya pili 0.25 Hz–10 MHz (kipindi cha default 1 s, kiwango cha juu ~100 ns).
-
Dual UART (TTL) na SMA-K / IPEX chaguo za antenna; programu ya PC kwa ajili ya kuangalia nyayo na mipangilio ya kifaa.
-
Scenes za matumizi: Utafiti/ramani za UAV, trekta za kujitegemea/AGV, urambazaji wa magari wa usahihi wa juu, robotics.
Jinsi RTK Inavyofanya Kazi (mfupi)
Kituo cha misingi kinahesabu makosa ya kipimo cha satellite dhidi ya nafasi yake inayojulikana na kutangaza data ya tofauti ya RTCM. Kituo cha simu kinatumia marekebisho haya ili kufikia upimaji wa wakati halisi, ngazi ya sentimita.
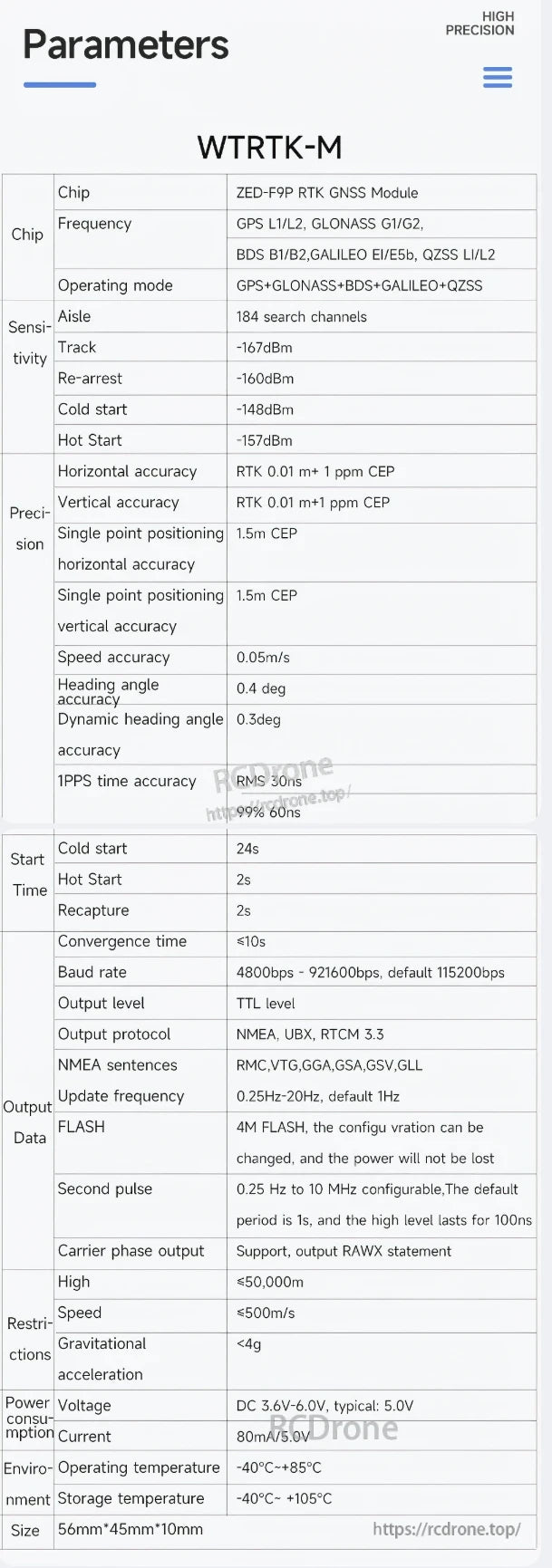
Maelezo ya Msingi
| Item | Spec |
|---|---|
| Chip ya GNSS | Moduli ya ZED-F9P RTK GNSS |
| Nyota/Bendi | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Channel | 184 channels za kutafuta |
| Uhisabati | Kufuatilia -167 dBm; upya -160 dBm; kuanza baridi -148 dBm; kuanza moto -157 dBm |
| Usahihi wa RTK (CEP) | Usawa/Wima: 0.01 m + 1 ppm CEP |
| Usahihi wa alama moja (CEP) | Usawa 1.5 m, Wima 1.5 m |
| Usahihi wa kasi | 0.05 m/s |
| Usahihi wa mwelekeo | 0.4° (dynamiki 0.3°) |
| Usahihi wa wakati wa 1PPS | RMS 30 ns, 99% 60 ns |
| Anza/Rekebisha | Baridi 24 s, Moto 2 s, Rekebisha 2 s; Mwelekeo ≤10 s |
| Kiwango cha Baud | 4 800–921 600 bps (kawaida 115 200 bps) |
| Ngazi ya umeme | TTL |
| Protokali | NMEA, UBX, RTCM 3.3; Sentensi za NMEA: RMC/VTG/GGA/GSA/GSV/GLL |
| Kiwango cha sasisho | 0.25–20 Hz (default 1 Hz); kumbuka: viwango vya juu sana huongeza mzigo wa serial—weka ≤ 5 Hz kwa uaminifu |
| Flash ya ndani | 4 MB, inahifadhi usanidi baada ya kuzima |
| Awamu ya kubebesha | RAWX pato linaungwa mkono |
| Vikwazo | Kimo ≤ 50 000 m; Kasi ≤ 500 m/s; Kasi ya kuongezeka < 4 g |
| Ugavi | DC 3.6–6.0 V (kawaida 5.0 V), ≈ 80 mA @ 5 V |
| Uendeshaji / Hifadhi | -40 °C hadi +85 °C / -40 °C hadi +105 °C |
| Vipimo | 56 × 45 × 10 mm (mchoro wa mbele unadhihirisha ~46 mm urefu) |
Interfaces &na Viashiria
Antenna: SMA-K (ikiwa na IPEX chaguo).
Bandari za UART (TTL, 4-pin kila moja):
-
P1 (kulia) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (kushoto) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
P2 inatumika kwa kuingiza/kuondoa RTCM; P1 inatoa NMEA data. P1/P2 VCC zimeunganishwa ndani—nishati kutoka moja yoyote.
LEDs
-
PWR: Nyekundu Imewashwa = nguvu imewekwa.
-
TX1/TX2: Kijani kinawaka = bandari ina data ya kutoa.
-
PPS: Imezimwa kabla ya kurekebisha; kijani kinawaka baada ya kueka 3D.
-
RTK: Imezimwa wakati haipo katika RTK; kijani kinawaka katika RTK Float; imewashwa katika RTK Fixed.
Muunganisho & Programu
-
Mpangilio wa waya: ungana na antena kwa SMA; ungana UART1 na PC ili kuona data ya eneo.
-
Base/Mobile: weka moduli moja kama base (inatoa RTCM); mobile inatumia RTCM ili kufikia RTK—mobile inaweza kutumika moja kwa moja kama RTK rover baada ya kupokea marekebisho.
-
PC software: uonyeshaji wa njia, mtazamo wa data, na mipangilio ya base/rover kwa funguo moja.
Maelezo
-
Baud ya kawaida ni 115 200 bps. Ikiwa unainua mzunguko wa pato, pandisha baud ipasavyo ili kuepuka kujaa (kasi ya juu ya vitendo ≤ 5 Hz kwenye viungo vya kawaida).
-
Maendeleo ya kawaida yanasaidiwa.
Maelezo
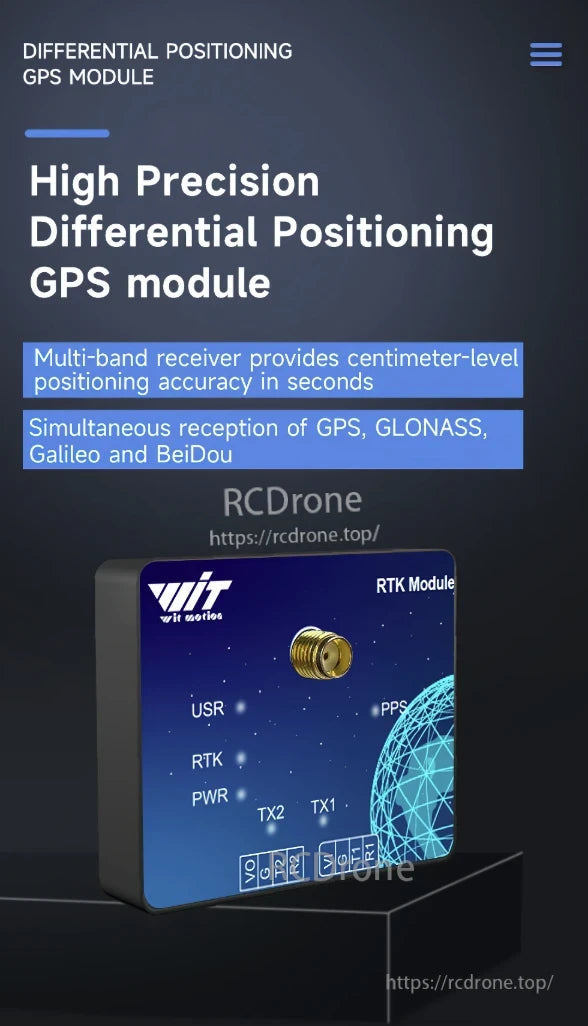
Moduli ya GPS ya uwekaji tofauti wa usahihi wa juu yenye usahihi wa kiwango cha sentimita. Inasaidia GPS, GLONASS, Galileo, BeiDou.Multi-band receiver, teknolojia ya RTK, PPS, TX1, TX2, USR, RTK, viashiria vya PWR.
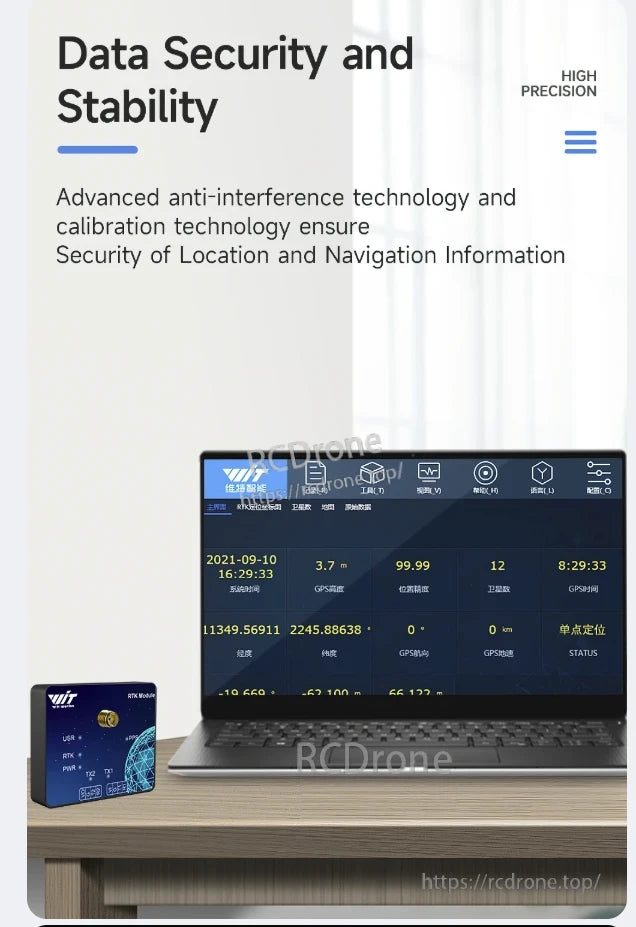
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS inahakikisha usalama wa data wa hali ya juu na utulivu kwa teknolojia ya kisasa ya kupambana na kuingiliwa na kalibrishaji kwa taarifa za kuaminika za eneo na urambazaji.
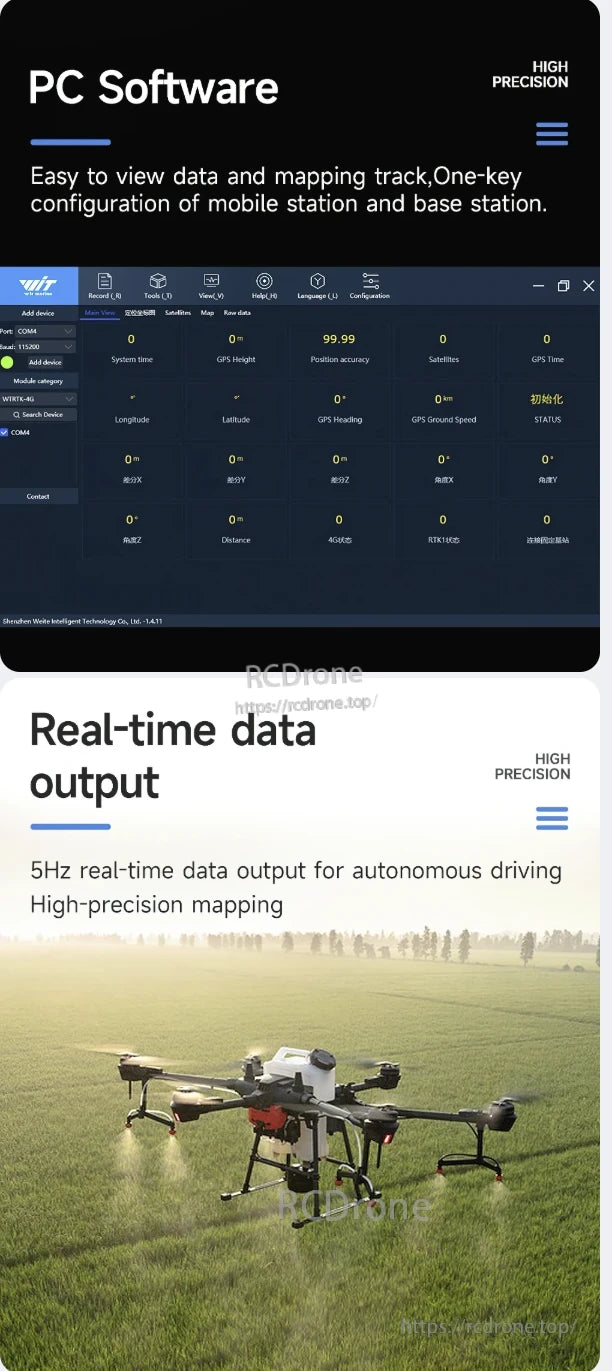
Programu ya RTK GNSS GPS yenye usahihi wa juu na pato la data la wakati halisi la 5Hz kwa ajili ya kuendesha kwa uhuru na ramani. Inasaidia usanidi wa funguo moja, ufuatiliaji wa satellite, upimaji sahihi, na telemetry ya kina.
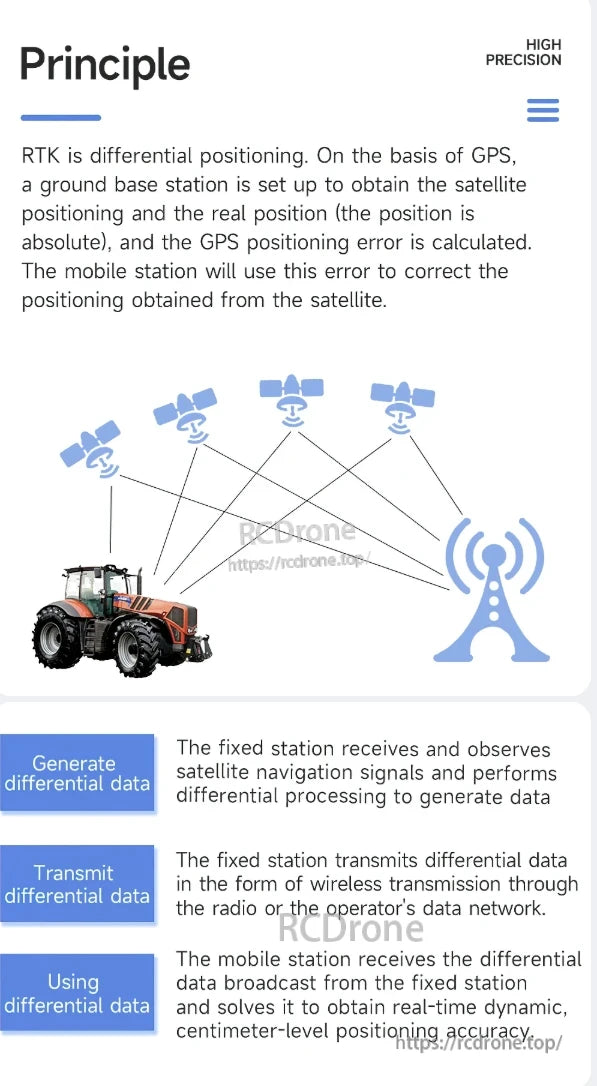
RTK inatumia upimaji wa tofauti na GPS. Kituo kilichowekwa kinahesabu makosa ya upimaji wa satellite na kuhamasisha marekebisho kwa njia isiyo na waya kwa kituo cha rununu, kuruhusu usahihi wa wakati halisi wa kiwango cha sentimita kwa urambazaji sahihi.
WTRTK-M ina moduli ya ZED-F9P RTK GNSS yenye msaada wa miongoni mwa nyota nyingi, usahihi wa juu (0.01m), nyakati za kuanza haraka, protokali nyingi, na inafanya kazi kutoka -40°C hadi +85°C.


Mpango wa muunganisho wa waya kwa moduli ya WitMotion RTK: mipangilio ya kituo cha msingi/mobaili, antena za SMA, muunganisho wa UART1 PC. Inajumuisha programu, mwongozo, video, na rasilimali za protokali.
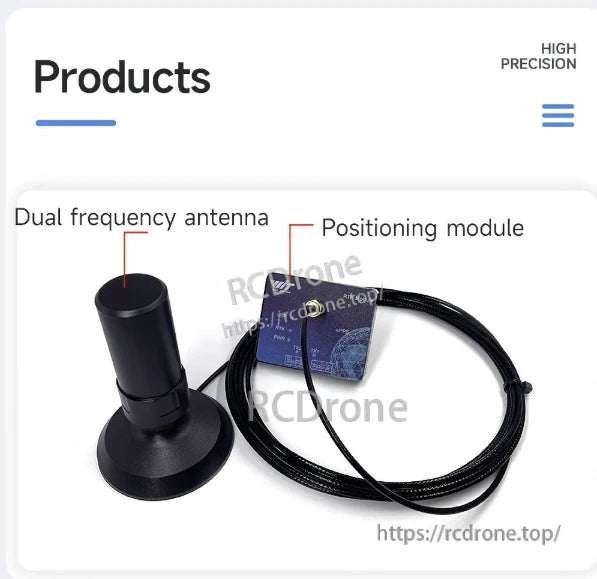
Antenna ya masafa mawili na moduli ya upimaji kwa usahihi wa juu GNSS GPS
Related Collections








