






ZeroOne X6 Pro Kidhibiti cha Ndege cha Autopilot FMU v6X STM32H753, IMU Tatu, Ethernet 100M, PWM 3.3V/5V
ZeroOne X6 Pro Kidhibiti cha Ndege cha Autopilot FMU v6X STM32H753, IMU Tatu, Ethernet 100M, PWM 3.3V/5V
ZeroOne
Couldn't load pickup availability
Muhtasari
ZeroOne X6 Pro ni kidhibiti cha ndege cha autopilot kilichotengenezwa kwa msingi wa usanifu wa FMU v6X wa chanzo wazi (Pixhawk Connector Standard DS-009), kilichoundwa kwa mazingira yenye mtetemo mkubwa na kuunga mkono ArduPilot na PX4 firmware. Inajumuisha sensorer za kiwango cha viwanda, mfumo wa kunyonya mshtuko uliojengwa ndani, upungufu wa IMU mara tatu, fidia ya joto la IMU, na kiunganishi cha Ethernet cha 100 Mbit kwa ajili ya kuongezeka kwa uhusiano.
Vipengele Muhimu
- Viwango vya vifaa vya wazi vya FMU v6X (Ulinganisho wa Kiwango cha Kiunganishi cha Pixhawk DS-009 umeonyeshwa)
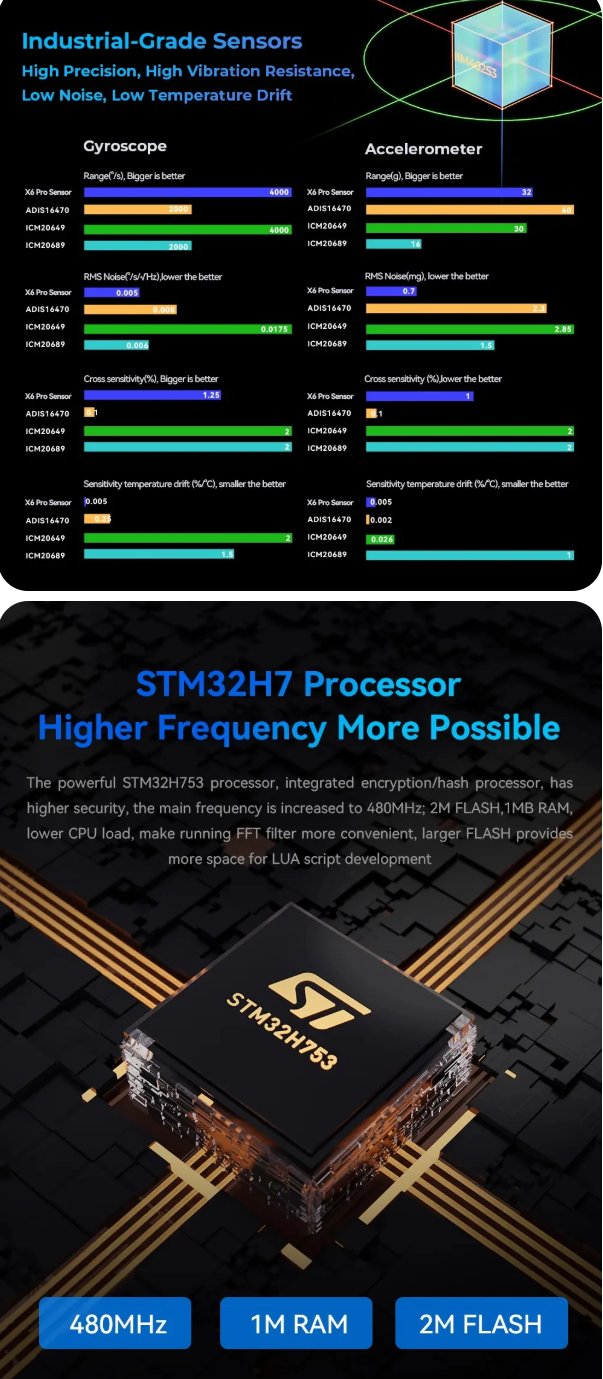
- Processor: STM32H753; mchakato wa usimbuaji/kuhesabu uliojumuishwa (kama ilivyosemwa); mzunguko mkuu umeongezwa hadi 480MHz; 2M FLASH; 1M RAM
- Sensor za kiwango cha viwanda zenye upinzani wa juu wa mtetemo, kelele ya chini, na mabadiliko madogo ya joto (kama ilivyosemwa)
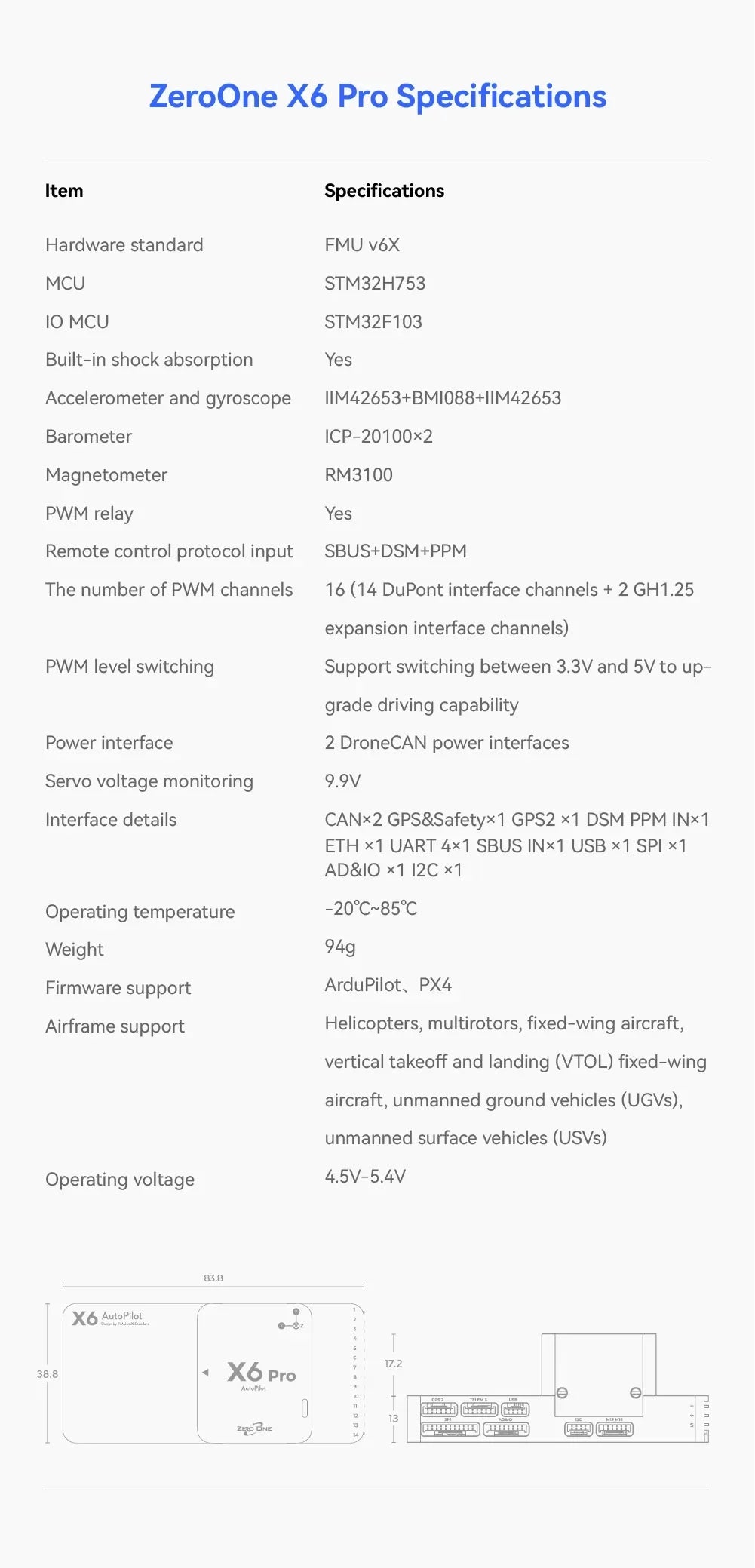
- Urejeleaji wa IMU mara tatu na usanifu wa urejeleaji wa sensor nyingi (kama ilivyosemwa)
- Urekebishaji wa joto la IMU (nguvu ya kupasha joto imeongezwa kwa 100%, kama ilivyosemwa)
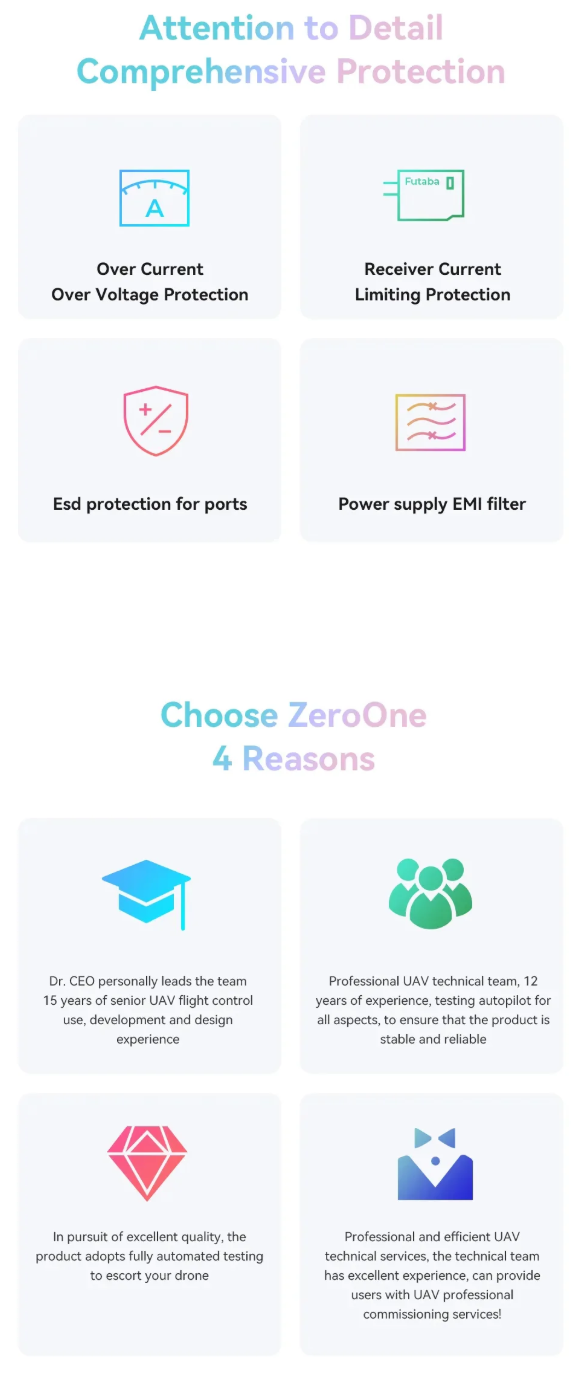
- Uwezo wa kuendesha PWM na 3.3V/5V PWM kiwango/mabadiliko ya voltage msaada
- Vipengele vya ulinzi: ulinzi wa juu ya sasa/juu ya voltage; ulinzi wa mipaka ya sasa ya mpokeaji; ulinzi wa ESD kwa bandari; kichujio cha EMI cha nguvu
- 100 Mbit Ethernet kiunganishi (ETH x1) kwa kuunganisha kompyuta za nje/vifaa (mfano wa majukwaa yanayoonyeshwa ni pamoja na Raspberry Pi na Nvidia Jetson series dev kit)
- DroneCAN msaada kupitia interfaces za nguvu (interfaces 2 za nguvu za DroneCAN zimeorodheshwa)
Maelezo ya kiufundi
| Standadi ya vifaa | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Masafa ya CPU (kama ilivyoelezwa) | 480MHz |
| Kumbukumbu (kama ilivyoelezwa) | 1M RAM |
| Flash (kama ilivyoelezwa) | 2M FLASH | Mifumo ya kupunguza mshtuko iliyojengwa ndani | Ndio |
| Accelerometer na gyroscope (karatasi ya vipimo) | IIM42653 + BMI088 + IIM42653 |
| Gyroscope iliyotajwa katika vifaa | ICM45686 (iliyotajwa katika maandiko ya kipengele); IIM42653 (iliyotajwa katika kumbukumbu ya msimbo wa ArduPilot na karatasi ya vipimo) |
| Barometer | ICP-20100 x2 |
| Magnetometer | RM3100 |
| PWM relay | Ndio |
| Ingizo la itifaki ya remote control | SBUS + DSM + PPM |
| Idadi ya vituo vya PWM | 16 (vituo 14 vya interface ya DuPont + 2 GH1.25 njia za upanuzi wa kiunganishi) |
| Kiwango cha kubadili PWM | Inasaidia kubadili kati ya 3.3V na 5V ili kuboresha uwezo wa kuendesha |
| Kiunganishi cha nguvu | Kiunganishi cha nguvu 2 za DroneCAN |
| Ufuatiliaji wa voltage ya servo | 9.9V |
| Maelezo ya kiunganishi | CAN x2; GPS&Usalama x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Joto la kufanya kazi | -20°C~85°C |
| Voltage ya kufanya kazi | 4.5V~5.4V |
| Uzito | 94g |
| Usaidizi wa Firmware | ArduPilot, PX4 |
| Usaidizi wa Airframe | Helikopta; multirotors; ndege za mabawa yaliyosimama; ndege za mabawa yaliyosimama na kutua wima (VTOL); magari yasiyo na rubani (UGVs); vyombo vya uso visivyo na rubani (USVs) |
| Vipimo vya muonekano (kama inavyoonyeshwa) | 83.8 mm; 38.8 mm; 17.2 mm; 13 mm |
Vikadiria vya Viwanda (thamani za chati zinaonyeshwa)
| Gyroscope | ||
| Kiwango (°/s) (kikubwa ni bora) | X6 Pro Sensor: 4000 | ADIS16470: 2000; ICM20649: 4000; ICM20689: 2000 |
| RMS Noise (°/s/sqrt(Hz)) (chini ni bora) | X6 Pro Sensor: 0.005 | ADIS16470: 0.008; ICM20649: 0.0175; ICM20689: 0.006 |
| Uwezo wa msalaba (%) (kubwa ni bora) | X6 Pro Sensor: 1.25 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Kuondolewa kwa joto la hisia (°/s/°C) (ndogo ni bora) | X6 Pro Sensor: 0.005 | ADIS16470: 0.25; ICM20649: 2; ICM20689: 1.5 |
| Accelerometer | ||
| Kiwango (g) (kubwa ni bora) | X6 Pro Sensor: 32 | ADIS16470: 40; ICM20649: 30; ICM20689: 16 |
| Kelele ya RMS (mg) (chini ni bora) | X6 Pro Sensor: 0.7 | ADIS16470: 2.3; ICM20649: 2.85; ICM20689: 1.5 |
| Uwezo wa msalaba (%) (chini ni bora) | X6 Pro Sensor: 1 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Kuondolewa kwa joto la hisia (%/°C) (ndogo ni bora) | X6 Pro Sensor: 0.005 | ADIS16470: 0.002; ICM20649: 0.026; ICM20689: 1 |
Maombi
- Helikopta
- Multi-copter
- Ndege zenye mabawa yasiyohamishika
- Ndege zenye mabawa yasiyohamishika ya VTOL
- UGV
- USV
Maelekezo
Huduma kwa wateja: [email protected] (au tembelea https://rcdrone.top/).
Maelezo
ZeroOne X6 Pro Flight Controller ina vipengele vya sensorer za kiwango cha viwanda, usahihi wa juu, kelele ya chini, na uwezo mzuri wa kuendesha PWM. Imejengwa kwa ndege zenye mzigo mkubwa, inatumia usanifu wa FMU v6X wa chanzo wazi na ufanisi wa Pixhawk.
ZeroOne X6 Pro inatumia sensorer za kiwango cha viwanda zenye usahihi wa juu, kelele ya chini, na upinzani wa mtetemo.Inafanya kazi kwenye processor ya 480MHz STM32H753 yenye 1MB RAM, 2MB FLASH, usalama ulioimarishwa, uchujaji wa FFT, na msaada wa uandishi wa LUA.
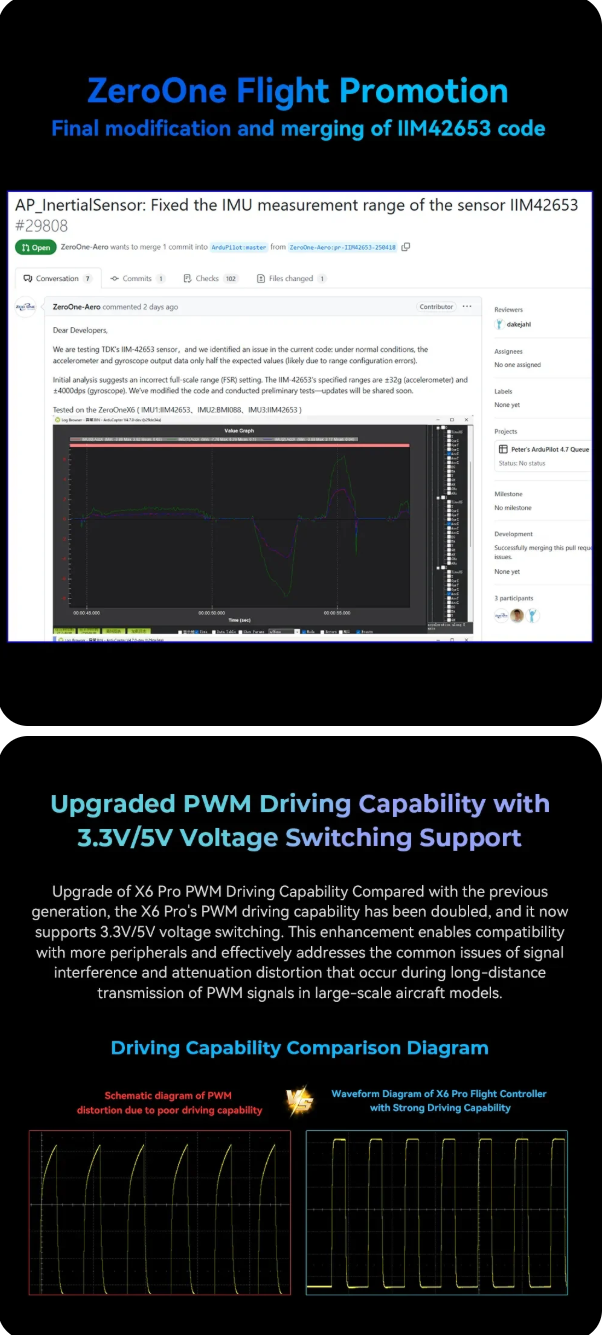
ZeroOne X6 Pro inaboresha kuendesha PWM kwa kubadilisha 3.3V/5V, uwezo wa kuongezeka ili kupunguza upotoshaji wa ishara. Fix ya anuwai ya sensa ya IMU kwa IIM42653 inahakikisha vipimo sahihi, ikiboresha utulivu wa ndege na ufanisi wa vifaa vya pembeni.
ZeroOne X6 Pro inatoa ulinzi wa kina: juu ya sasa, juu ya voltage, ESD, na uchujaji wa EMI. Imeungwa mkono na uzoefu wa zaidi ya miaka 15 katika UAV, timu ya kitaalamu inahakikisha uaminifu, upimaji wa kiotomatiki, na msaada wa kiufundi wenye ufanisi kwa utendaji bora wa drone.

ZeroOne X6 Pro ina sponji inayoshughulikia mshtuko kwa utulivu, inapunguza mtetemo na kelele, na inajumuisha kiunganishi cha Ethernet cha 100M kwa SLAM, ufuatiliaji wa kuona, na kazi za juu za drone kwa ushirikiano na Raspberry Pi au Jetson.
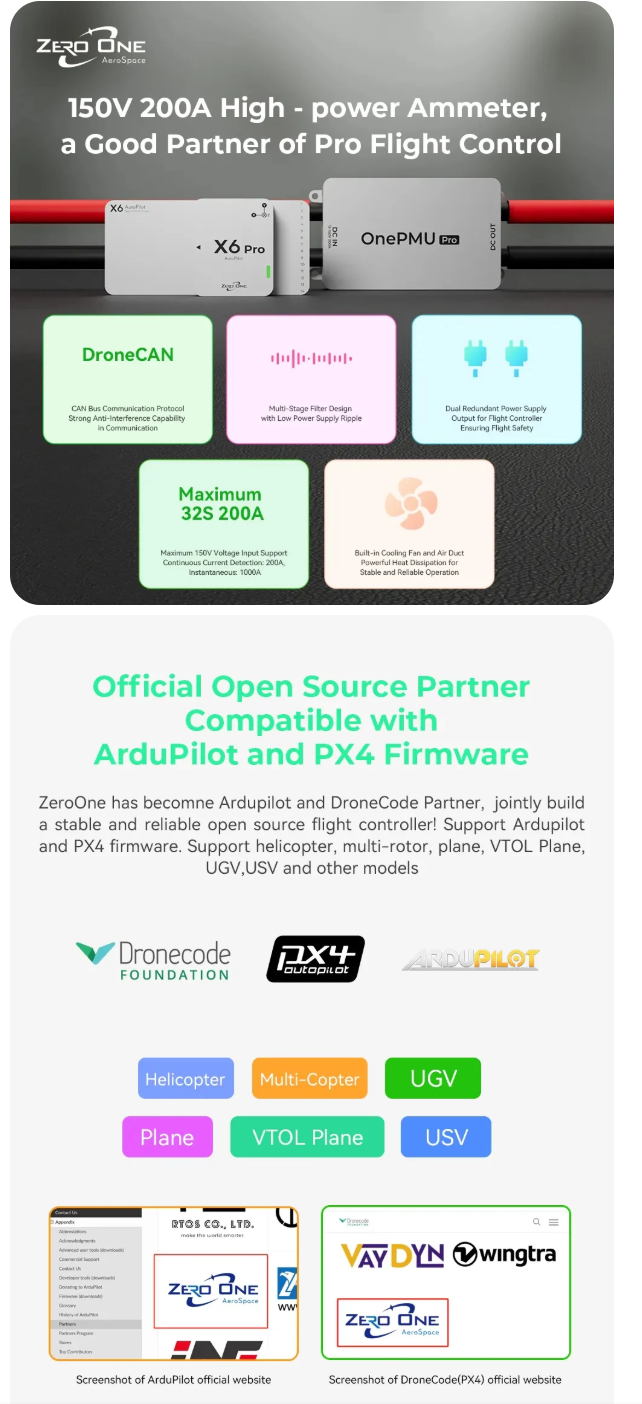
ZeroOne X6 Pro inasaidia 150V 200A, inafaa na ArduPilot na PX4.Vipengele vya DroneCAN, chanzo cha nguvu mbili, ventileta ya kupoza, na inafaa kwa helikopta, multi-copters, ndege, VTOL, UGV, na mifano ya USV kwa udhibiti wa ndege wa kitaalamu.
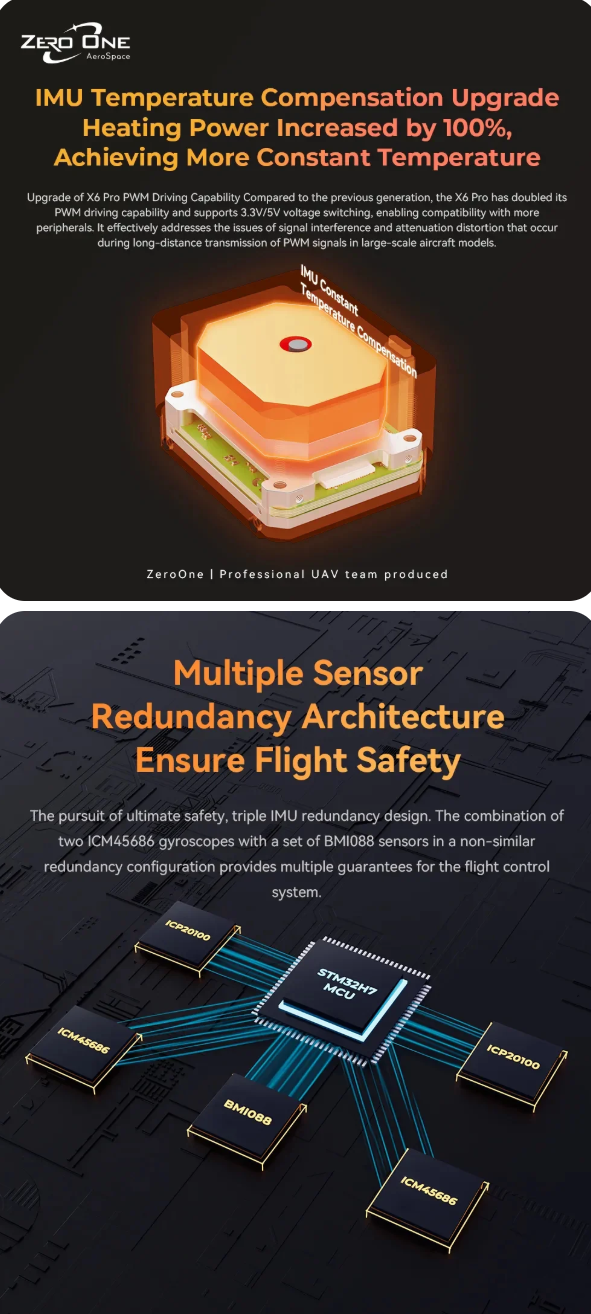
ZeroOne X6 Pro inaboresha fidia ya joto la IMU, inaongeza nguvu ya kupasha moto mara mbili, na inahakikisha usalama wa ndege kupitia upungufu wa IMU mara tatu na sensorer za ICM45686 na BMI088 zilizounganishwa na STM32H7 MCU.
ZeroOne X6 Pro ina FMU v6X, STM32 MCUs, njia 16 za PWM, nguvu mbili za DroneCAN, ufuatiliaji wa servo wa 9.9V, operesheni ya -20°C–85°C, uzito wa 94g, na inasaidia ArduPilot/PX4 kwa helikopta, multirotors, VTOLs, UGVs, na USVs.
Related Collections






