





Контролер польоту Holybro Pix32 v6 - Стандартний набір модуля STM32H743 FC, міні-набір із GPS M8N/M9N/M10
Контролер польоту Holybro Pix32 v6 - Стандартний набір модуля STM32H743 FC, міні-набір із GPS M8N/M9N/M10
HolyBro
Не вдалося завантажити інформацію про можливість самовивозу
Pix32 v6 — це останнє оновлення контролерів польоту pix32 v5. Це варіант Pixhawk 6C. Він складається з окремого контролера польоту та несучої плати, які з’єднані 100-контактним роз’ємом. Він розроблений для тих пілотів, яким потрібна потужна, гнучка та настроювана система керування польотом.
Усередині Pix32 v6 ви можете знайти STM32H743 на основі STMicroelectronics® у поєднанні з сенсорною технологією від Bosch® & InvenSense®, що дає вам гнучкість і надійність для керування будь-яким автономним транспортним засобом, придатним як для академічних, так і для комерційних застосувань.
Мікроконтролер H7 Pix32 v6 містить ядро Arm® Cortex®-M7, що працює до 480 МГц, має 2 МБ флеш-пам’яті та 1 МБ оперативної пам’яті. Завдяки оновленій обчислювальній потужності розробники можуть бути більш продуктивними та ефективними у своїй роботі над розробкою, дозволяючи створювати складні алгоритми та моделі. Він включає в себе високопродуктивні, малошумні IMU на борту, розроблені, щоб бути економічно ефективними з резервуванням IMU. Система віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань, що дозволяє транспортним засобам досягати кращих загальних характеристик польоту.
Цей контролер польоту ідеально підходить для людей, які шукають доступний і модульний політ. контролер, який може використовувати налаштовану основну плату. Ми оприлюднили схеми базової плати pix32 v6. Ви можете зробити плату-носії на замовлення самостійно або просто дозволити нам допомогти вам із цим. Використовуючи налаштовану плінтусну плату, ви можете переконатися, що фізичний розмір, розпиновка та вимоги до розподілу живлення ідеально відповідають вашому автомобілю, гарантуючи, що у вас є всі необхідні з’єднання, а також жодні витрати та велика кількість роз’ємів, яких ви не маєте.
Ключові моменти дизайну:
- Високопродуктивний процесор STM32H743 із більшою обчислювальною потужністю та оперативною пам’яттю
- Новий рентабельний дизайн із низькопрофільним форм-фактором
- Ново розроблена інтегрована система віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань
- Температура IMU контролюється вбудованими нагрівальними резисторами, що забезпечує оптимальну робочу температуру IMU
Примітка:
- Порівняльна таблиця модулів живлення
- M10 GPS Потрібен PX4 1.14, потрібен ArduPilot 4.3 або новіший. (Станом на 7 вересня 2023 р. PX4 випустив 1.14 RC1 (кандидат до випуску). Будь ласка, перегляньте це посилання для останньої інформації про випуск. Докладніше про те, як оновити випуск RC, можна знайти тут.)
Легко створіть свій власний плінтус, використовуючи наданий еталонний файл дизайну.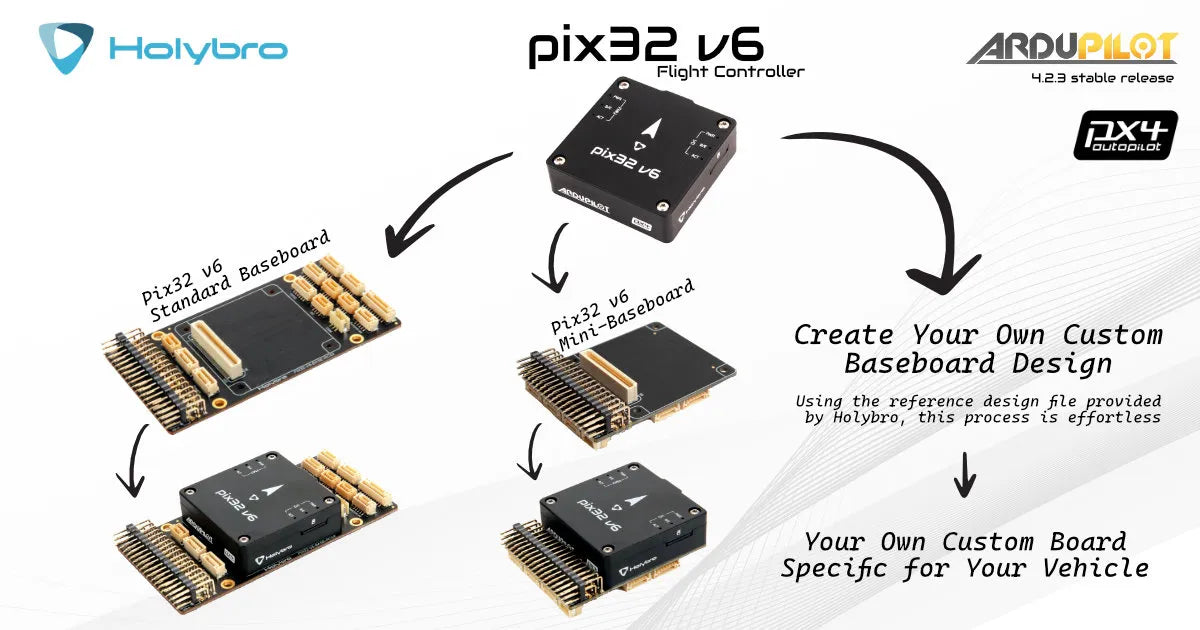
SKU20190/20192 Включає:
- Модуль польотного контролера Pix32 v6
- Стандартний плінтус / міні-плінтус
- PM02 V3 12S модуль живлення
- Стандартний набір кабелів
SKU20191/SKU20193 Включає:
- Модуль польотного контролера Pix32 v6
- Стандартний плінтус / міні-плінтус
- PM02 V3 12S Модуль живлення
- Набір міні-кабелів
- M8N GPS / M9N GPS / M10 GPS
Примітка: Стандартний набір Pix32v6 постачатиметься з базовою платою Pix32v5 до подальшого повідомлення. Щоб отримати додаткову інформацію щодо основної плати, перегляньте тут.
Related Collections












