| معلمة الأجهزة |
| جهد العمل | 16 فولت |
| جهد الدخل | 4 ثانية ~ 6 ثانية (14.8 فولت ~ 25.2 فولت) |
| جهد الخرج | 5 فولت (الاتصال مع PWM) |
| التيار الديناميكي | 800~1500 مللي أمبير عند 16 فولت |
| استهلاك الطاقة | متوسط 12.8 واط، الحد الأقصى 24 واط |
| درجة حرارة بيئة العمل. | -20 درجة مئوية ~ +50 درجة مئوية |
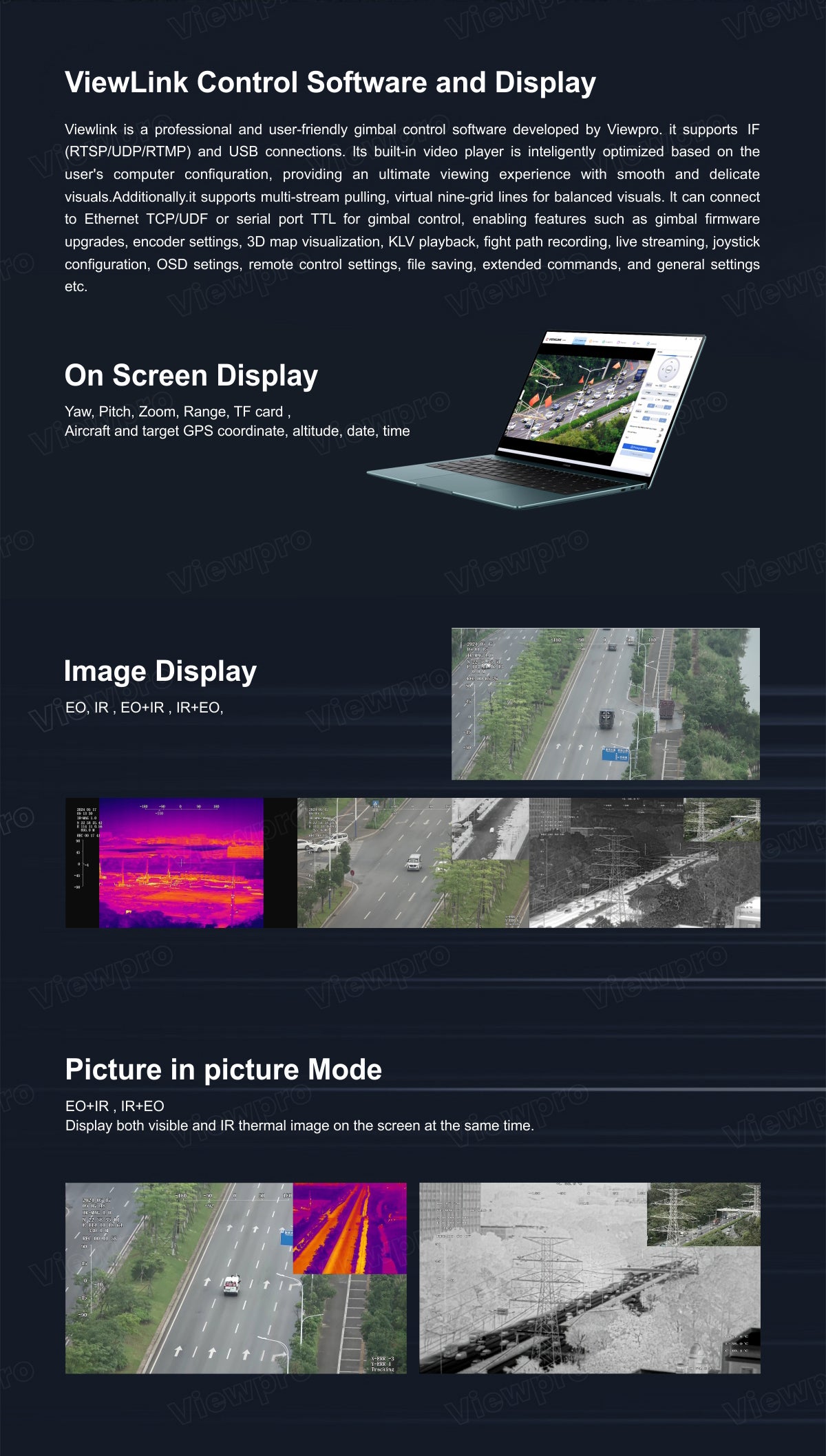
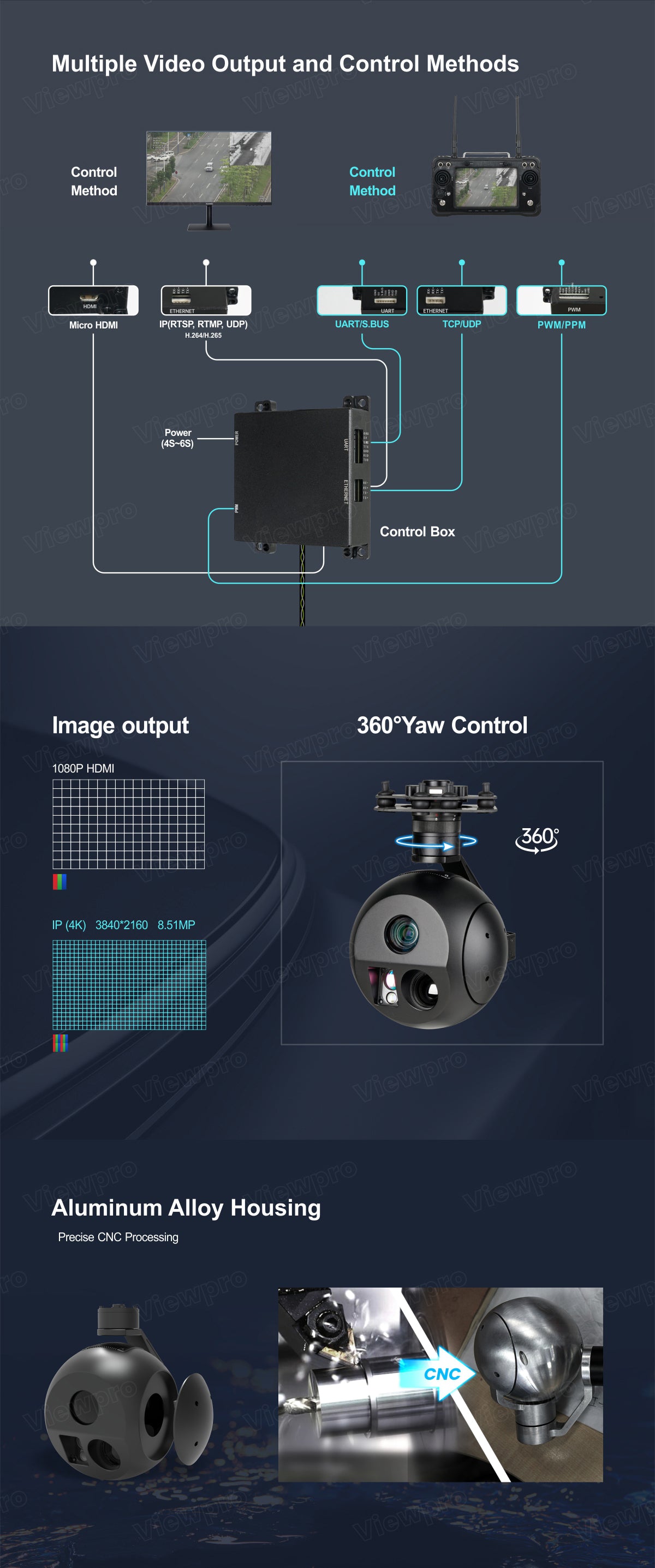
| الإخراج (اختياري) | ميكرو HDMI (1080 بكسل 30 إطارًا في الثانية) / IP (RTSP/UDP 720 بكسل/1080 بكسل/4K 25 إطارًا في الثانية/30 إطارًا في الثانية H264/H265) |
| التخزين المحلي | بطاقة SD (حتى 512 جيجابايت، الفئة 10، FAT32 شكل) |
| تنسيق تخزين الصور على بطاقة TF | JPG (4K:3840*2160) |
| تنسيق تخزين الفيديو على بطاقة TF | أ. MP4 (4K: 3840*2160) ملحوظة: الإخراج 720P/1080P |
| ب. MP4 (1080P: 1920*1080) ملحوظة: الإخراج 4K |
| لا يمكن أن يكون إخراج الفيديو وتخزين الفيديو بدقة 4K في نفس الوقت |
| طريقة التحكم | تعديل عرض النبضة / SBUS / TTL / TCP / UDP |
| مواصفات الجيمبال |
| النطاق الميكانيكي | درجة الميل/الانحدار: -60°~123°، اللفة: ±70 درجة، الانحراف/الدوران: ±300° / ±360°*N (إصدار إخراج IP) |
| مدى قابل للتحكم | درجة الميل/الانحدار: -45°~120°، الانحراف/الدوران: ±290° / ±360°*N (إصدار إخراج IP) |
| زاوية الاهتزاز | الميل/الدوران/الانحراف: ±0.02 درجة |
| مفتاح واحد للمركز | √ |
| مواصفات كاميرا EO |
| مستشعر التصوير | سوني 1/2.5" "Exmor R" CMOS |
| مجموع البكسل | 8.51 ميجا بكسل |
| التكبير البصري | 20x، F2.0 إلى F3.8، f = 4.4 مم (عريض)، 88.4 مم (مقرب)، حتى 30x بدقة فائقة |
| التقريب الرقمي | 12x (240x مع التكبير البصري) |
| الحد الأدنى لمسافة العمل | 80 مم (الطرف العريض)، 800 مم (الطرف المقرب) |
| زاوية الرؤية (H,V) ) | ارتفاع: 70.2 درجة (الطرف العريض) ~ 4.1 درجة (الطرف المقرب) |
| V: 43.1 درجة (الطرف العريض) ~ 2.3 درجة (الطرف المقرب) |
| نسبة الإشارة إلى الضوضاء | 50 ديسيبل |
| الإضاءة الموصى بها | 100 إلى 100000 لوكس |
| الحد الأدنى من الإضاءة | 1.6 لوكس (1/30 ثانية، 50%، إيقاف تشغيل ICR، إيقاف تشغيل وضع الحساسية العالية)
0.4 لوكس (1/30 ثانية، 50%، إيقاف تشغيل ICR، تشغيل وضع الحساسية العالية)
0.21 لوكس (50%، إيقاف تشغيل ICR، غالق بطيء 1/4 ثانية، إيقاف تشغيل الحساسية العالية)
0.06 لوكس (50%، إيقاف تشغيل ICR، غالق بطيء 1/4 ثانية، تشغيل حساسية عالية) |
| تعويض الإضاءة الخلفية | تشغيل/إيقاف |
| يكسب | آلي |
| توازن اللون الأبيض | تلقائي/يدوي |
| سرعة الغالق الإلكترونية | 1/1 إلى 1/10000 ثانية (22 خطوة) |
| تقليل الضوضاء | تشغيل/إيقاف (المستوى 5 إلى 1/ إيقاف، 6 خطوات) |
| وضع إزالة الضباب | تشغيل/إيقاف (منخفض، متوسط، مرتفع) |
| ركز | التركيز التلقائي/اليدوي/التركيز التلقائي لمرة واحدة |
| سرعة التركيز | 2 ثانية |
| تدوير الصورة | 180 درجة، صورة معكوسة أفقية/رأسية |
| مواصفات جهاز التصوير الحراري بالأشعة تحت الحمراء |
| طول التركيز | 24 ملم |
| مجال الرؤية الأفقي | 18.2 درجة |
| مجال الرؤية العمودي | 14.6 درجة |
| مجال الرؤية القطري | 23.2 درجة |
| مسافة المباحث (الرجل: 1.8 × 0.5 متر) | 1000 متر |
| التعرف على المسافة (الرجل: 1.8 × 0.5 متر) | 250 متر |
| المسافة المؤكدة (رجل: 1.8 × 0.5 متر) | 125 متر |
| مسافة المباحث (السيارة: 4.2 × 1.8 متر) | 3067 متر |
| التعرف على المسافة (السيارة: 4.2 × 1.8 متر) | 767 متر |
| المسافة المؤكدة (السيارة: 4.2 × 1.8 متر) | 383 متر |
| وضع العمل | جهاز تصوير حراري غير مبرد بموجات طويلة (8 ميكرومتر إلى 14 ميكرومتر) |
| بكسل الكاشف | 640*512 |
| درجة البكسل | 12 ميكرومتر |
| طريقة التركيز | عدسة أساسية حرارية |
| تصحيح الانبعاثية | 0.01~1 |
| شبكة الإنترنت | ≤50mK (@25 درجة مئوية) |
| MRTD | ≤550mK (@التردد المميز) |
| تحسين الصورة | ضبط سطوع الصورة ونسبة التباين تلقائيًا |
| لوحة الألوان | أبيض ساخن، أسود ساخن، لون زائف |
| التصحيح التلقائي غير المنتظم | نعم (لا يوجد مصراع) |
| التقريب الرقمي | 1x ~ 4x |
| نوع الترمومتر | لا يدعم |
| تتبع الأشياء بواسطة كاميرا الأشعة تحت الحمراء / EO |
| معدل تحديث انحراف البكسل | 50 هرتز |
| تأخير إخراج بكسل الانحراف | 5 مللي ثانية |
| الحد الأدنى من تباين الكائن | 5% |
| نسبة الإشارة إلى الضوضاء | 4 |
| الحد الأدنى لحجم الكائن | 32*32 بكسل |
| الحد الأقصى لحجم الكائن | 128*128 بكسل |
| سرعة التتبع | ±48 بكسل/إطار |
| وقت ذاكرة الكائن | 100 إطار (4 ثوانٍ) |
| متوسط قيم الجذر التربيعي للضوضاء النبضية في موضع الكائن | < 0.5 بكسل |
| جهاز تحديد المدى بالليزر بالأشعة تحت الحمراء |
| يتراوح | للسيارة ≥ 3000 متر؛ للإنسان ≥ 2000 متر |
| الحد الأدنى للمدى | 15م |
| تكرار | 1~10 هرتز |
| دقة | ±1م |
| شعاع الضوء | ليزر نبضي 1535±5 نانومتر |
| زاوية متباعدة | ~0.6 مراد |
| حل الموقع | خط العرض وخط الطول للهدف |
| رافايندر | قم بقياس المسافة بين الكائن الموجود في منتصف الشاشة وجهاز تحديد المدى بالليزر |
| سمات |
| شاشة العرض على الشاشة | عرض زاوية انحراف المحور وميله، والتكبير، وقيمة النطاق، ومدة تسجيل البطاقة، ونظام تحديد المواقع العالمي (GPS) للطائرة وارتفاعها أو نقطة تحديد المواقع العالمية (GPS) والارتفاع (اختر واحدًا منها، ونظام تحديد المواقع العالمي (GPS) لنقطة الهدف والارتفاع افتراضيًا)، والتاريخ والوقت |
| تحديد الموقع الجغرافي | عرض الوقت وإحداثيات GPS في صورة exif |
| قراءة البطاقات عبر الإنترنت | قراءة الصور أو مقاطع الفيديو بواسطة SMB / قراءة الصور أو مقاطع الفيديو بواسطة HTTP |
| KLV (UDP) (اختياري) | تسجيل البطاقة أو تشغيل الفيديو من خلال Viewlink |
| أردو بايلوت / PX4 | دعم(بروتوكول Mavlink)
اختياري: دعم ميزة "اتبعني" في Ardupilot |
| تبديل الفيديو | EO+IR/IR+EO/EO/IR |
| معلومات التعبئة والتغليف |
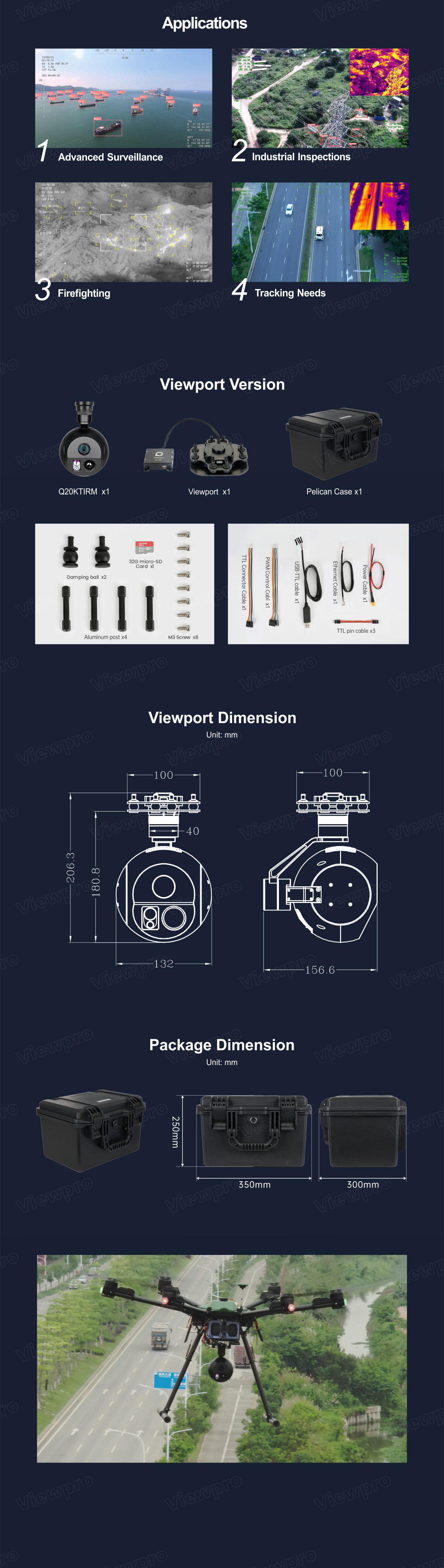
| شمال غرب | 1300±10 جرام (إصدار Viewport مع Viewport) |
| قياس المنتج | 156.6*132*200.6 مم /156.6*132*206.3 مم (إصدار Viewport مع Viewport) |
| مُكَمِّلات | جهاز كاميرا gimbal مكون من قطعة واحدة، براغي، أسطوانات نحاسية، كرات تخميد، لوحات تخميد / صندوق بلاستيكي عالي الجودة مع وسادة إسفنجية |