






لقد حصلت منتجاتنا على شهادة CE وROHS، وتقدم معظمها بطلب للحصول على براءات اختراع المظهر وبراءات اختراع نماذج المنفعة
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T جهاز التحكم التسلسلي BUS Servo Robot Arduin ثنائي المحور Shafe روبوت roborock iRobot Roomba روبوت فراغ سيرفو
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T جهاز التحكم التسلسلي BUS Servo Robot Arduin ثنائي المحور Shafe روبوت roborock iRobot Roomba روبوت فراغ سيرفو
Feetech
سعر عادي
$21.25 USD
سعر عادي
سعر البيع
$21.25 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
المواصفات
اسم العلامة التجارية: feetech
الأصل: البر الرئيسي للصين
المواد: البلاستيك
نوع البلاستيك: الكمبيوتر
أجزاء وملحقات التحكم عن بعد: بطاريات - LiPo
الحجم: 10*10*10
لنوع المركبة: السيارات
الاستخدام: المركبات وألعاب التحكم عن بعد
ترقية الأجزاء/الملحقات: بطارية ليثيوم
الأجهزة الطرفية/أجهزة التحكم عن بعد: جهاز التحكم عن بعد
مستلزمات الأدوات: البطارية
الكمية: 1 قطعة
المعلمات التقنية: KV1100
رقم الطراز: SCS225-C006
سمات الدفع الرباعي: المحركات
قاعدة العجلات: البراغي
رقم الطراز: SCS225-C006
الحجم: 45.23 مم × 24.73 مم × 35 مم
الوزن: 55± 1 جرام
نوع الترس: نحاس
زاوية الحد: لا يوجد حد
المحمل: المحامل الكروية
مفتاح تروس البوق: 25T
المحرك: محرك عديم النواة
نطاق جهد التشغيل: 6-7.4V
ذروة عزم الدوران : 19.5kg.cm@6V
عزم الدوران المقدر : 6.5kg.cm@6V
نوع البروتوكول: اتصال تسلسلي غير متزامن نصف مزدوج
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

متخصص في تصنيع التصميم الشخصي وتصنيع المعدات الأصلية والتصنيع حسب الطلب 1. شعارك أو طباعته
2. سلك مؤازر
3. التعبئة: كيس PE ، صندوق ألوان ، صندوق بلاستيكي
شعارك
4.موصل الكابل
5.مختلف مخصص لجهد العمل الواسع
2. سلك مؤازر
3. التعبئة: كيس PE ، صندوق ألوان ، صندوق بلاستيكي
شعارك
4.موصل الكابل
5.مختلف مخصص لجهد العمل الواسع
استخدام المنتج

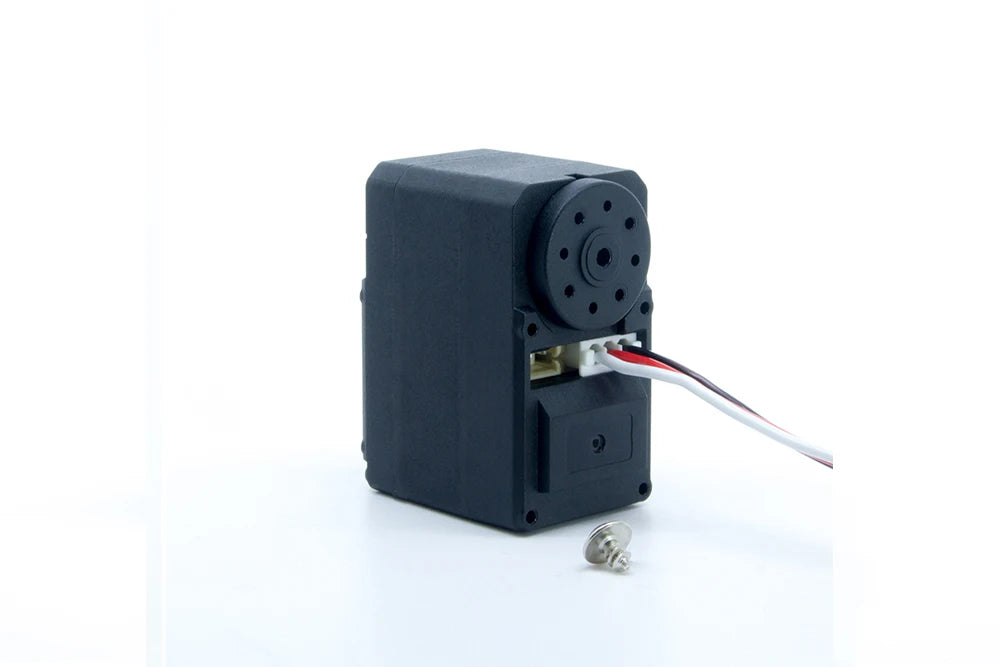
FEETECH 7.4V 20KG.CM علبة بلاستيكية ميتال جير مشفر مغناطيسي عمود مزدوج TTL سيرفو الناقل التسلسلي
تفاصيل الصور




تفاصيل الصور
FEETECH 7.4V 20KG.CM علبة بلاستيكية ميتال جير مشفر مغناطيسي عمود مزدوج TTL سيرفو الناقل التسلسلي
وظيفة التحكم الإلكتروني:
1.وظيفة إيقاف بدء التسارع: يمكن ضبط قيمة السرعة والتسارع، وتأثير الحركة أكثر لطفًا.
2.دقة عالية، 360 درجة دقة الموضع المطلق 4096 بت، أعلى دقة للموضع هي 0.088 درجة، إذا كان التحكم 90 درجة، أدخل 4096 / 360 * 90 = 1024، إذا كان التحكم 180 درجة، أدخل 4096 / 360 * 180 = 2048، وذلك لحساب .
3.هناك أربعة تبديل بين أوضاع العمل (الوضع 0 موضع المؤازرة، الوضع 1 سرعة الحلقة المغلقة، الوضع 2 السرعة المفتوحة، الوضع 3 خطوات مؤازرة).
1)、 الوضع 0: وضع الموقع، الوضع الافتراضي. في هذا الوضع، يمكن تحقيق التحكم المطلق بزاوية 360 درجة. دعم حركة التسارع.
2)、الوضع 1: سرعة الحلقة المغلقة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 1، والتبديل إلى وضع السرعة المغلقة، وإدخال السرعة المقابلة في عمود السرعة للتشغيل .
3)、الوضع 2: سرعة الحلقة المفتوحة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 2، والتبديل إلى وضع السرعة المفتوحة، وأدخل الوقت المقابل في عمود الوقت للتشغيل.
4)、Mode3: وضع الخطوة: في واجهة البرمجة، يتم ضبط الحد الأقصى/الحد الأدنى للزاوية على 0، ويتم ضبط وضع التشغيل على 3. قم بالتبديل إلى وضع الخطوة. أدخل الموضع في شريط الموضع للتقدم نحو الموضع المستهدف. انقر على الموضع مرة أخرى لمواصلة التحرك في نفس الاتجاه.
4.وضع الدوران المتعدد، تحكم مطلق وردود فعل 360 درجة، في ظل أعلى دقة، يمكن أن يكون التحكم المطلق في الموضع زائد أو ناقص 7 دورات، ولكن لا يتم حفظ عدد دورات الطاقة، بل يتم الاحتفاظ فقط بقيمة ردود الفعل المطلقة للموضع.
5、معايرة مفتاح واحد، تثبيت بزاوية 360 درجة في أي موضع، (40 (عشري) إدخال العنوان 128 (عشري)) موضع التصحيح الحالي لمفتاح واحد هو الوسط (2048 (عشري)).
6、مستوى اتصال TTL، اتصال غير متزامن نصف مزدوج، دعم بروتوكول الناقل لضبط معلمات القراءة والكتابة، وإضافة وظيفة قراءة متزامنة (أرسل تعليمات لتلقي تعليمات القراءة من كل مؤازرة على الناقل بدورها.)
7、حماية متعددة، (الحمل الزائد والتيار الزائد والجهد الزائد والسخونة الزائدة وإعدادات المفتاح وتغيير معلمة الحالة)
1)、الحماية من الحمل الزائد: من خلال اكتشاف الموضع، أثناء الحركة من وضع البداية إلى موضع الهدف، عندما يتم اكتشاف أن الموضع الحالي ليس هو الموضع المستهدف بعد مواجهة حجب العوائق، فإن قوة التفريغ تستمر لمدة 2S (20% من قوة الحجب الافتراضية). حتى يتم تشغيل أمر جديد، قم بتحرير الحماية
2)、حماية التيار الزائد: من خلال القيمة الحالية المحددة، تحقق مما إذا كان التيار يصل إلى القيمة الحالية المحددة. عندما تصل إلى القيمة الحالية المحددة، حرر القوة (عزم الدوران الافتراضي هو 0). حتى يتم تشغيل أمر جديد، قم بتحرير الحماية
3)、حماية الجهد الزائد: اكتشف قيمة الجهد الحالي. إذا تجاوزت قيمة الجهد المحدد، فسيعرض المنبه الجهد الزائد.
4)、الحماية من الحرارة الزائدة: كشف درجة حرارة المحرك الحالية. إذا تجاوزت درجة الحرارة القيمة المحددة، فسيعرض المنبه ارتفاع درجة الحرارة.
8: ردود فعل متعددة:
1) تحميل التعليقات: يعمل خرج التحكم الحالي على تشغيل دورة عمل الجهد للمحرك، و المقياس الكامل هو 1000 = 100% من عزم الدوران الناتج.
2) التغذية المرتدة الحالية: تيار العمل المؤازر، 1 = 6.5 مللي أمبير
3) التغذية المرتدة الجهد: جهد العمل المؤازر، 70 = 7 فولت، 0.1 فولت
4) ردود الفعل على درجة الحرارة: درجة حرارة العمل الداخلية للمؤازرة الحالية (قياس درجة الحرارة) .
5) ردود الفعل على السرعة: ردود الفعل على سرعة دوران المحرك الحالي، وعدد الخطوات في وقت الوحدة (في الثانية)
9、افتح معلمات PID.
1.وظيفة إيقاف بدء التسارع: يمكن ضبط قيمة السرعة والتسارع، وتأثير الحركة أكثر لطفًا.
2.دقة عالية، 360 درجة دقة الموضع المطلق 4096 بت، أعلى دقة للموضع هي 0.088 درجة، إذا كان التحكم 90 درجة، أدخل 4096 / 360 * 90 = 1024، إذا كان التحكم 180 درجة، أدخل 4096 / 360 * 180 = 2048، وذلك لحساب .
3.هناك أربعة تبديل بين أوضاع العمل (الوضع 0 موضع المؤازرة، الوضع 1 سرعة الحلقة المغلقة، الوضع 2 السرعة المفتوحة، الوضع 3 خطوات مؤازرة).
1)、 الوضع 0: وضع الموقع، الوضع الافتراضي. في هذا الوضع، يمكن تحقيق التحكم المطلق بزاوية 360 درجة. دعم حركة التسارع.
2)、الوضع 1: سرعة الحلقة المغلقة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 1، والتبديل إلى وضع السرعة المغلقة، وإدخال السرعة المقابلة في عمود السرعة للتشغيل .
3)、الوضع 2: سرعة الحلقة المفتوحة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 2، والتبديل إلى وضع السرعة المفتوحة، وأدخل الوقت المقابل في عمود الوقت للتشغيل.
4)、Mode3: وضع الخطوة: في واجهة البرمجة، يتم ضبط الحد الأقصى/الحد الأدنى للزاوية على 0، ويتم ضبط وضع التشغيل على 3. قم بالتبديل إلى وضع الخطوة. أدخل الموضع في شريط الموضع للتقدم نحو الموضع المستهدف. انقر على الموضع مرة أخرى لمواصلة التحرك في نفس الاتجاه.
4.وضع الدوران المتعدد، تحكم مطلق وردود فعل 360 درجة، في ظل أعلى دقة، يمكن أن يكون التحكم المطلق في الموضع زائد أو ناقص 7 دورات، ولكن لا يتم حفظ عدد دورات الطاقة، بل يتم الاحتفاظ فقط بقيمة ردود الفعل المطلقة للموضع.
5、معايرة مفتاح واحد، تثبيت بزاوية 360 درجة في أي موضع، (40 (عشري) إدخال العنوان 128 (عشري)) موضع التصحيح الحالي لمفتاح واحد هو الوسط (2048 (عشري)).
6、مستوى اتصال TTL، اتصال غير متزامن نصف مزدوج، دعم بروتوكول الناقل لضبط معلمات القراءة والكتابة، وإضافة وظيفة قراءة متزامنة (أرسل تعليمات لتلقي تعليمات القراءة من كل مؤازرة على الناقل بدورها.)
7、حماية متعددة، (الحمل الزائد والتيار الزائد والجهد الزائد والسخونة الزائدة وإعدادات المفتاح وتغيير معلمة الحالة)
1)、الحماية من الحمل الزائد: من خلال اكتشاف الموضع، أثناء الحركة من وضع البداية إلى موضع الهدف، عندما يتم اكتشاف أن الموضع الحالي ليس هو الموضع المستهدف بعد مواجهة حجب العوائق، فإن قوة التفريغ تستمر لمدة 2S (20% من قوة الحجب الافتراضية). حتى يتم تشغيل أمر جديد، قم بتحرير الحماية
2)、حماية التيار الزائد: من خلال القيمة الحالية المحددة، تحقق مما إذا كان التيار يصل إلى القيمة الحالية المحددة. عندما تصل إلى القيمة الحالية المحددة، حرر القوة (عزم الدوران الافتراضي هو 0). حتى يتم تشغيل أمر جديد، قم بتحرير الحماية
3)、حماية الجهد الزائد: اكتشف قيمة الجهد الحالي. إذا تجاوزت قيمة الجهد المحدد، فسيعرض المنبه الجهد الزائد.
4)、الحماية من الحرارة الزائدة: كشف درجة حرارة المحرك الحالية. إذا تجاوزت درجة الحرارة القيمة المحددة، فسيعرض المنبه ارتفاع درجة الحرارة.
8: ردود فعل متعددة:
1) تحميل التعليقات: يعمل خرج التحكم الحالي على تشغيل دورة عمل الجهد للمحرك، و المقياس الكامل هو 1000 = 100% من عزم الدوران الناتج.
2) التغذية المرتدة الحالية: تيار العمل المؤازر، 1 = 6.5 مللي أمبير
3) التغذية المرتدة الجهد: جهد العمل المؤازر، 70 = 7 فولت، 0.1 فولت
4) ردود الفعل على درجة الحرارة: درجة حرارة العمل الداخلية للمؤازرة الحالية (قياس درجة الحرارة) .
5) ردود الفعل على السرعة: ردود الفعل على سرعة دوران المحرك الحالي، وعدد الخطوات في وقت الوحدة (في الثانية)
9、افتح معلمات PID.
Related Collections






