




محرك سيرفو MyActuator RMD-X12-320، محرك عالي العزم مدمج مع EtherCAT وCAN BUS، محول USB-CAN، مقاومة 120Ω
محرك سيرفو MyActuator RMD-X12-320، محرك عالي العزم مدمج مع EtherCAT وCAN BUS، محول USB-CAN، مقاومة 120Ω
MyActuator
تعذر تحميل توفر الالتقاط
نظرة عامة
يعتبر MyActuator RMD-X12-320 مشغل سيرفو عالي الأداء مصمم للروبوتات الصناعية، والروبوتات التعاونية، وأنظمة الأتمتة عالية الدقة. يدمج محرك عالي العزم، وعلبة تروس كوكبية، وإلكترونيات سائق متقدمة في شكل مدمج، مما يتيح التحكم السلس في الحركة والتواصل الموثوق عبر EtherCAT أو CAN BUS.
مع تصميمه المحسن وخيارات الواجهة الغنية، يوفر RMD-X12-320 كفاءة استثنائية، وتحكم دقيق، ومرونة للتطبيقات الروبوتية المت demanding.
الميزات الرئيسية
-
تصميم مدمج: المحرك، والسائق، والمخفض مدمجة في وحدة مدمجة واحدة.
-
عزم دوران عالي: مثالي للمفاصل الروبوتية الثقيلة وأنظمة الأتمتة.
-
بروتوكولات الاتصال المتعددة: تدعم كل من EtherCAT و CAN BUS.
-
تغذية راجعة دقيقة: مشفرات عالية الدقة لحركة سلسة وتحديد المواقع.
-
توصيل وتشغيل: كابلات موضوعة بوضوح ومحولات مرفقة للإعداد السريع.
-
توافق واسع: مناسب للروبوتات الصناعية، الروبوتات التعاونية، المركبات ذاتية القيادة، وأذرع الأتمتة.
وصف الواجهة
| المنفذ | التعريف | الوصف |
|---|---|---|
| 1. EtherCAT_OUT | مخرج EtherCAT | مخرج الاتصال إلى وحدات أخرى. |
| 2. EtherCAT_IN | إدخال EtherCAT | إدخال الاتصال من وحدة التحكم الرئيسية. |
| 3. VCC | مزود الطاقة الإيجابي | الإدخال الرئيسي للتيار المستمر الإيجابي. |
| 4. CAN_L | الخط المنخفض لحافلة CAN | إشارة منخفضة لحافلة CAN للتواصل. |
| 5. CAN_H | الخط العالي لحافلة CAN | إشارة عالية لحافلة CAN للتواصل. |
| 6. GND | الأرضي | طرف الطاقة السلبية. |
| 7. T- / 8. T+ | خطوط التغذية المرتدة | تغذية مرتدة لحالة الوحدة إلى المحطة الرئيسية. |
| 9. R- / 10. R+ | خطوط الأوامر | إشارات التحكم المرسلة من المحطة الرئيسية إلى المشغل. |
الملحقات المضمنة
| التسمية | البند | الوصف |
|---|---|---|
| A | مزود الطاقة + كابل CAN BUS ×2 | يتضمن موصل مزود الطاقة XT90 مع خطوط بيضاء (CAN_L)، صفراء (CAN_H)، حمراء (VCC)، وسوداء (GND). |
| B | مقاوم طرفي 120Ω ×1 | لإنهاء CAN BUS. |
| C | كابل اتصال EtherCAT ×2 | موصلات SH1.0mm 4-pin لنقل واستقبال إشارة EtherCAT. |
| D | وحدة اتصال CAN BUS ×1 | محول USB إلى CAN للتشخيص والتكامل.يتضمن إنهاء قابل للتبديل بقدرة 120Ω. |
معلومات التعبئة والتغليف
-
أبعاد العلبة: 280 مم (الطول) × 230 مم (العرض) × 130 مم (الارتفاع)
-
المحتويات:
-
X12-320 محرك سيرفو ×1
-
مزود الطاقة + كابل الاتصال CAN BUS ×2
-
مقاومة طرفية 120Ω ×1
-
كابل الاتصال EtherCAT ×2
-
وحدة الاتصال CAN BUS ×1 (محول USB-CAN)
-
التطبيقات
-
الروبوتات الصناعية والروبوتات التعاونية
-
المركبات الموجهة آليًا (AGVs) والروبوتات المتنقلة المستقلة (AMRs)
-
الأذرع الروبوتية للتشغيل الآلي والتجميع الدقيق
منصات البحث والتطوير التي تتطلب تحكم موثوق في الحركة
التفاصيل
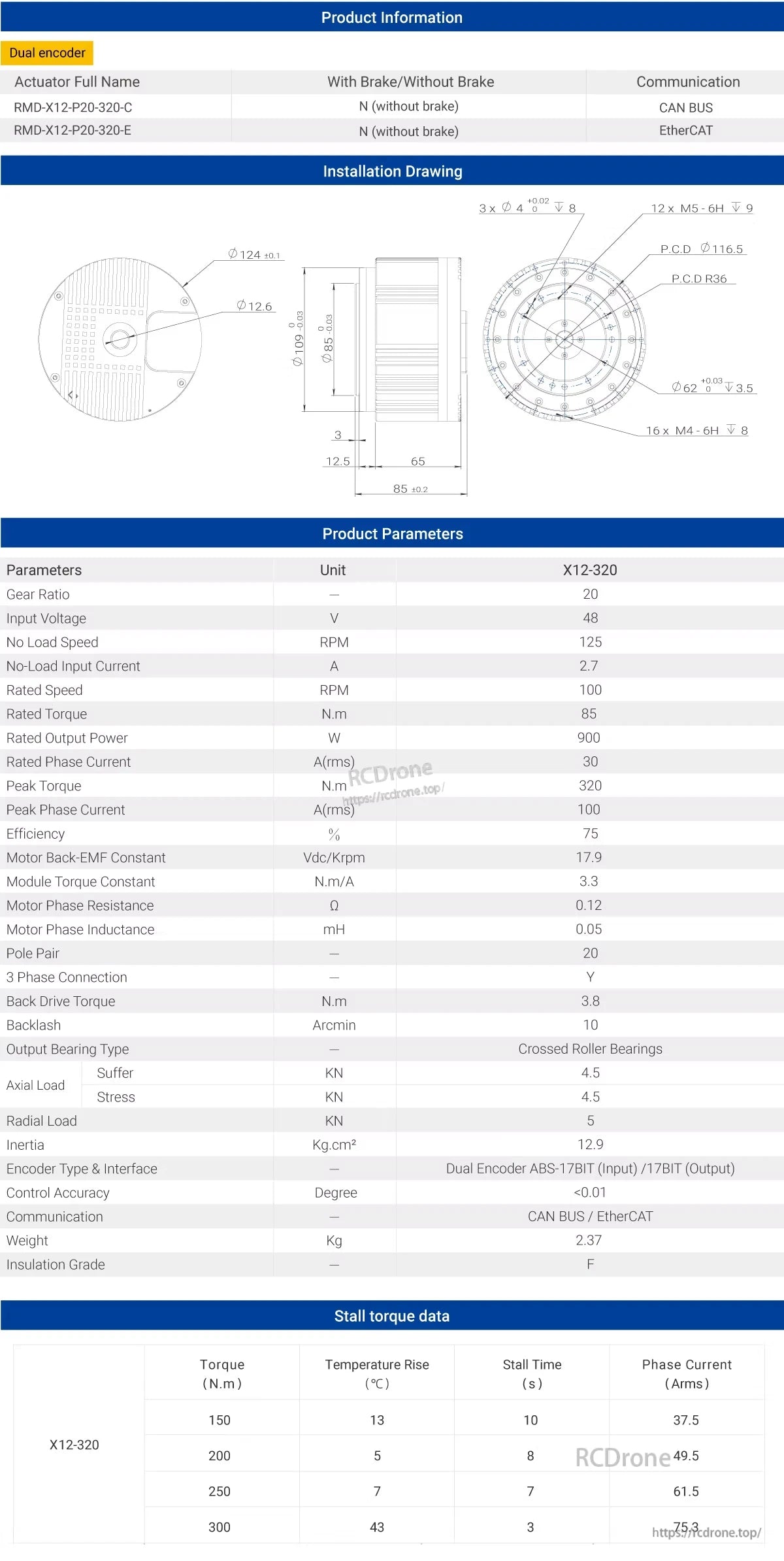
MyActuator محرك سيرفو RMD-X12-P20-320، مشفر مزدوج، نسبة تروس 20، إدخال 48 فولت، طاقة 900 واط، عزم دوران مصنف 85 نيوتن متر، اتصال CAN BUS/EtherCAT، 2.37 كجم وزن، محامل أسطوانية متقاطعة، 12.9 كجم.سم² عزم الدوران.

واجهة السيرفو X12-320 تدعم EtherCAT، CAN bus، واتصالات الطاقة. العبوة: 280×230×130 مم. تشمل مزود الطاقة، الكابلات، المقاومات، ومحولات USB-CAN مجانية.

ملحقات X12-320 تشمل مزود الطاقة، كابلات CAN BUS، EtherCAT، وتفاصيل الوحدة. تضمن الأسلاك الملونة، الموصلات، والمحطات التركيب الصحيح. محول USB-CAN مجاني مشمول مع كل طلب.

سيرفو RMD X12 320: استجابة 100μs، مشفر مزدوج، EtherCAT/CAN، عزم 320N.m، Ø124mm×85mm، للاستخدام في الروبوتات والأتمتة.

محرك السيرفو RMD-X12-P20-320-C : إدخال 48V، نسبة تروس 20:1، طاقة قصوى 900W، مشفرات مزدوجة 17 بت، CAN BUS/EtherCAT، 2.37 كجم، مع أبعاد مفصلة.

محرك سيرفو X12-320L مع الطاقة، كابلات CAN BUS، كابلات EtherCAT ومقاوم نهائي 1200.

عرض تعبئة محرك MYACTUATOR السيرفو، بما في ذلك كابلات CAN BUS ومقاوم 120Ω.
Related Collections




