ST-3046-C001 এটি 6V 40kg সিরিয়াল বাস স্মার্ট সার্ভো, সম্পূর্ণ অ্যালুমিনিয়াম খাদ কেস গ্রহণ করুন, কোরলেস মোটর, স্টিল গিয়ারবক্স, কোরলেস মোটর, এলটিটি রিসার্চড সেলফ 2 টিটি কনডেন্ট রিসার্চ বোর্ড বিট উচ্চ নির্ভুল চৌম্বকীয় কোডিং সেন্সর. স্টল টর্ক 40kg.cm, প্রতিক্রিয়া অবস্থান, গতি, ভোল্টেজ, বর্তমান, তাপমাত্রা, লোড পরামিতি, এইভাবে, ওভারলোড এবং ওভার-কারেন্ট সুরক্ষা উপলব্ধি করা যেতে পারে। এটি শিল্প সরঞ্জাম, রোবট এবং ট্রান্সমিশন অ্যাপ্লিকেশন পরিস্থিতিতে প্রয়োগের জন্য উপযুক্ত৷
SKU:STS3046
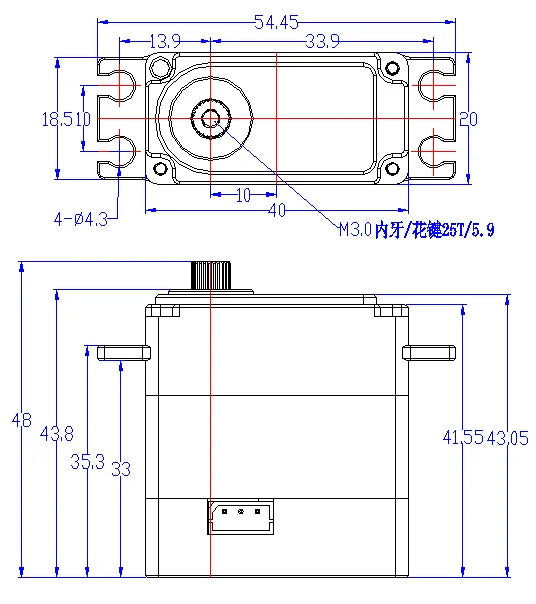
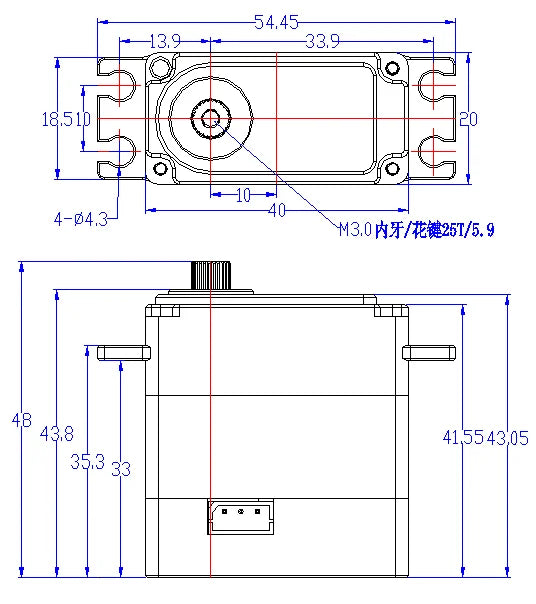
পণ্যের নাম: 7.4V 40KG. CM প্লাস্টিক কেস মেটাল গিয়ার ম্যাগনেটিক এনকোডার একক শ্যাফ্ট TTL সিরিয়াল বাস সার্ভো
দেখার আকার) 45.235 মিমি ) 45.235 মিমি > স্টল টর্ক:[email protected]
স্টল স্পিড:[email protected]
প্রতিক্রিয়া: লোড / অবস্থান / গতি / ভোল্টেজ / বর্তমান / তাপমাত্রা
ইলেক্ট্রনিক সুরক্ষা: ওভারহিট / ওভারকারেন্ট / ওভারভোল্টেজ / ওভারলোড সুরক্ষা




কাঠামোগত বৈশিষ্ট্য:
শেলটি উচ্চ শক্তির সাথে ইঞ্জিনিয়ারিং প্লাস্টিক শেল গ্রহণ করে,কেন্দ্রের দূরত্বকে অপ্টিমাইজ করুন,আরো কমপ্যাক্ট সামগ্রিক কাঠামো, সার্ভো গিয়ারটি 1:345 কপার গিয়ার সংমিশ্রণ গ্রহণ করে,উচ্চ টর্ক;একই টর্ক এ ,স্ট্যান্ডার্ড সার্ভো আকারের সাথে তুলনা করুন,এটি নিম্ন প্রোফাইল দেখায়(5মিমি),শরীরটি ডবল অক্ষের কাঠামোর নকশা গ্রহণ করে,বৃত্তের কাঠামোগত বৈশিষ্ট্যগুলি শক্ত রেখাযুক্ত,ধাতু প্রিন্সিপাল ডেপুটি সার্ভো হর্ন সহ ডাবল আউটগোয়িং তারের তারের মোড,এটি উপযুক্ত চতুর্মুখী রোবট, স্নেক রোবট, ডেস্কটপ রোবট, হিউম্যানয়েড রোবট এবং যান্ত্রিক বাহুতে অ্যাপ্লিকেশন।
ইলেক্ট্রনিক কন্ট্রোল ফাংশন:
1. অ্যাক্সিলারেশন স্টার্ট স্টপ ফাংশন: গতি এবং ত্বরণ মান সেট করা যেতে পারে, গতি প্রভাব আরও মৃদু।
2.উচ্চ নির্ভুলতা, 360 ডিগ্রি পরম অবস্থান 4096 বিট নির্ভুলতা, সর্বোচ্চ অবস্থানের রেজোলিউশন হল 0.088 ডিগ্রি, যদি নিয়ন্ত্রণ 90 ডিগ্রি হয়, ইনপুট 4096 / 360 * 90 = 1024, যদি নিয়ন্ত্রণ 180 ডিগ্রি হয়, ইনপুট 4096 / 360 = 8080 *28 , যাতে গণনা করা যায়।
3. চারটি ওয়ার্কিং মোড সুইচিং আছে (মোড 0 পজিশন সার্ভো, মোড 1 স্পিড ক্লোজড-লুপ, মোড 2 স্পিড ওপেন-লুপ, মোড 3 স্টেপ সার্ভো)।
1)、মোড 0: অবস্থান মোড, ডিফল্ট মোড। এই মোডে, 360 ডিগ্রি পরম কোণ নিয়ন্ত্রণ উপলব্ধি করা যেতে পারে। ত্বরণ আন্দোলনকে সমর্থন করুন।
2)、মোড 1:স্পীড ক্লোজড-লুপ, প্রোগ্রামিং ইন্টারফেসে, অপারেশন মোড 1 এ সেট করা আছে, স্পিড ক্লোজড-লুপ মোডে স্যুইচ করুন এবং চালানোর জন্য স্পিড কলামে সংশ্লিষ্ট গতি লিখুন .
3)、মোড 2:স্পীড ওপেন-লুপ, প্রোগ্রামিং ইন্টারফেসে, অপারেশন মোড 2 এ সেট করা হয়েছে, স্পিড ওপেন-লুপ মোডে স্যুইচ করুন এবং চালানোর জন্য টাইম কলামে সংশ্লিষ্ট সময় লিখুন।
4)、Mode3: ধাপ মোড: প্রোগ্রামিং ইন্টারফেসে, সর্বাধিক / সর্বনিম্ন কোণ সীমা 0 এ সেট করা হয়েছে এবং অপারেশন মোডটি 3 এ সেট করা হয়েছে৷ ধাপ মোডে স্যুইচ করুন৷ লক্ষ্য অবস্থানের দিকে পদক্ষেপ নিতে পজিশন বারে অবস্থানটি লিখুন। একই দিকে পদক্ষেপ চালিয়ে যেতে আবার অবস্থানে ক্লিক করুন।
4、মাল্টি টার্ন মোড, 360 ডিগ্রি পরম নিয়ন্ত্রণ এবং প্রতিক্রিয়া, সর্বোচ্চ নির্ভুলতার অধীনে, পরম অবস্থান নিয়ন্ত্রণ প্লাস বা মাইনাস 7 টার্ন হতে পারে, কিন্তু পাওয়ার চক্রের সংখ্যা সংরক্ষিত হয় না, শুধুমাত্র পরম অবস্থান প্রতিক্রিয়া মান বজায় রাখা হয়।
5、একটি কী ক্রমাঙ্কন, যেকোনো অবস্থানে 360 ডিগ্রি কোণ ইনস্টলেশন, (40 (দশমিক) ঠিকানা ইনপুট 128 (দশমিক)) একটি মূল সংশোধন বর্তমান অবস্থান হল মধ্যম (2048 (দশমিক))।
6、TTL যোগাযোগ স্তর, হাফ ডুপ্লেক্স অ্যাসিঙ্ক্রোনাস কমিউনিকেশন, রিড এবং রাইট প্যারামিটার সামঞ্জস্য করতে বাস প্রোটোকল সমর্থন, এবং সিঙ্ক্রোনাস রিড ফাংশন যোগ করুন (একটি পাঠান পালাক্রমে বাসের প্রতিটি সার্ভো থেকে রিড ব্যাক নির্দেশনা পাওয়ার নির্দেশনা।)
7、একাধিক সুরক্ষা, (ওভারলোড, ওভারকারেন্ট, ওভারভোল্টেজ, ওভারহিটিং, সুইচ সেটিং, কন্ডিশন প্যারামিটার পরিবর্তন)
1) 、ওভারলোড সুরক্ষা: অবস্থান সনাক্তকরণের মাধ্যমে, প্রারম্ভিক অবস্থান থেকে লক্ষ্য অবস্থানে চলাচলের সময়, যখন বর্তমান অবস্থান সনাক্ত করা হয় যে বাধা অবরোধের সম্মুখীন হওয়ার পরে লক্ষ্য অবস্থান নয়, আনলোডিং শক্তি 2S (20%) পর্যন্ত স্থায়ী হয় ডিফল্ট ব্লকিং ফোর্স)। একটি নতুন কমান্ড ট্রিগার না হওয়া পর্যন্ত, রিলিজ সুরক্ষা
2)、অভারকারেন্ট সুরক্ষা: সেট কারেন্ট মানের মাধ্যমে, কারেন্ট সেট বর্তমান মান পর্যন্ত পৌঁছেছে কিনা তা পরীক্ষা করুন। যখন এটি সেট বর্তমান মান পৌঁছায়, বল ছেড়ে দিন (ডিফল্ট টর্ক 0)। একটি নতুন কমান্ড ট্রিগার না হওয়া পর্যন্ত, রিলিজ সুরক্ষা
3)、ওভার ভোল্টেজ সুরক্ষা: বর্তমান ভোল্টেজের মান সনাক্ত করুন। যদি এটি সেট ভোল্টেজ মান অতিক্রম করে, তাহলে অ্যালার্ম ওভার-ভোল্টেজ প্রদর্শন করবে।
4)、অত্যধিক গরম সুরক্ষা: বর্তমান মোটর তাপমাত্রা সনাক্ত করুন। তাপমাত্রা নির্ধারিত মান অতিক্রম করলে, অ্যালার্ম অতিরিক্ত উত্তাপ প্রদর্শন করবে।
8:একাধিক প্রতিক্রিয়া:
1) লোড প্রতিক্রিয়া: বর্তমান নিয়ন্ত্রণ আউটপুট মোটরের ভোল্টেজ ডিউটি চক্রকে চালিত করে এবং সম্পূর্ণ স্কেল হল 1000 = 100% টর্ক আউটপুট।
2)বর্তমান প্রতিক্রিয়া: সার্ভো ওয়ার্কিং কারেন্ট, 1 = 6.5mA
3)ভোল্টেজ প্রতিক্রিয়া: সার্ভো ওয়ার্কিং ভোল্টেজ,70=7V,0.1V
4)তাপমাত্রার প্রতিক্রিয়া: বর্তমান সার্ভোর অভ্যন্তরীণ কাজের তাপমাত্রা (তাপমাত্রা পরিমাপ)।
5)গতি প্রতিক্রিয়া: বর্তমান মোটর ঘূর্ণনের গতি এবং একক সময়ের (প্রতি সেকেন্ডে) ধাপের সংখ্যা

আমাদের পরিষেবা: আমরা অরিজিনাল ডিজাইন ম্যানুফ্যাকচারিং (ODM) এবং অরিজিনাল ইকুইপমেন্ট ম্যানুফ্যাকচারিং (OEM) এর জন্য ওয়ান-স্টপ কাস্টমাইজড সলিউশন অফার করি। আমাদের ক্ষমতার মধ্যে রয়েছে ইলেকট্রনিক ডিজাইন, স্ট্রাকচারাল ডিজাইন এবং প্রোডাকশন।উপরন্তু, আমরা PWM, RS485, 3V-24v অপারেশন এবং 0-360° ফিডব্যাক হুইল কন্ট্রোলের মতো বৈশিষ্ট্য সহ সার্ভোর মতো পণ্যগুলির জন্য কাস্টমাইজেশন পরিষেবা সরবরাহ করি৷
ODM এবং OEM এবং কাস্টম মেড 1. আপনার লোগো লেবেল বা প্রিন্ট
2. সার্ভো ওয়্যার
3. প্যাকিং: PE ব্যাগ, রঙের বক্স, প্লাস্টিকের বক্স wity আপনার লোগো
4. কেবল সংযোগকারী
5. কাস্টমাইজড বিভিন্ন ওয়াইড ওয়ার্কিং ভোল্টেজ সার্ভো
9、PID প্যারামিটার খুলুন।
আমাদের পণ্যগুলি 'CE', 'RoHS', এবং 'REACH' থেকে সার্টিফিকেশন পেয়েছে। উপরন্তু, আমরা আমাদের ডিজাইনের জন্য চেহারা পেটেন্ট এবং মডেল পেটেন্ট ধারণ করি।