



DAMIAO DM-2325 ২৪ ভি, ৩৮০ আরপিএম, ৫ এন·মি রোবট মোটর ১:২৫ গিয়ার, CAN/FD CAN এবং ইনক্রিমেন্টাল এনকোডার সহ
DAMIAO DM-2325 ২৪ ভি, ৩৮০ আরপিএম, ৫ এন·মি রোবট মোটর ১:২৫ গিয়ার, CAN/FD CAN এবং ইনক্রিমেন্টাল এনকোডার সহ
DAMIAO
নিয়মিত দাম
$45.00 USD
নিয়মিত দাম
বিক্রয় মূল্য
$45.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
সারসংক্ষেপ
DAMIAO DM-2325 একটি সংক্ষিপ্ত রোবট মোটর যা রোবোটিক্সে সঠিক গতির নিয়ন্ত্রণের জন্য ডিজাইন করা হয়েছে। এতে ইনক্রিমেন্টাল এনকোডার ফিডব্যাক, CAN/FD CAN নিয়ন্ত্রণ ইন্টারফেস এবং UART কনফিগারেশন রয়েছে। 1:25 হ্রাস অনুপাত, 24 V সরবরাহ এবং সংজ্ঞায়িত নিয়ন্ত্রণ মোড সহ, এটি নির্ভরযোগ্য গতি এবং অবস্থান নিয়ন্ত্রণের প্রয়োজনীয় অ্যাপ্লিকেশনগুলির জন্য উপযুক্ত।
মূল বৈশিষ্ট্যসমূহ
- মডেল: DM-2325
- নমিনাল ভোল্টেজ: 24 V
- নমিনাল কারেন্ট: 5 A / 3.2 A; পিক কারেন্ট: 13 A / 7.5 A
- নমিনাল টর্ক: 5 N·m; পিক টর্ক: 2 N·m
- নমিনাল গতি: 380 rpm; সর্বাধিক নো-লোড গতি: 560 rpm
- হ্রাস অনুপাত: 1:25; মেরু জোড়: 7
- ফেজ ইন্ডাকট্যান্স: 75 μH; ফেজ প্রতিরোধ: 0.2915 Ω
- সর্বাধিক রেডিয়াল লোড: 395 N
- আকার: 28 mm বাইরের ব্যাস; 77.6 mm উচ্চতা
- মোটরের ওজন: 172।
- ওজন: 2 g
- এনকোডার প্রকার: ইনক্রিমেন্টাল এনকোডার
- নিয়ন্ত্রণ ইন্টারফেস: CAN@1 Mbps (সর্বাধিক), FD CAN@5 Mbps (সর্বাধিক)
- কনফিগারেশন ইন্টারফেস: UART@921600 bps
- নিয়ন্ত্রণ মোড: MIT মোড, স্পিড মোড, পজিশন মোড
স্পেসিফিকেশন
| মডেল | DM-2325 |
| নমিনাল ভোল্টেজ | 24 V |
| নমিনাল কারেন্ট | 5 A / 3.2 A |
| পিক কারেন্ট | 13 A / 7.5 A |
| নমিনাল টর্ক | 5 N·m |
| পিক টর্ক | 2 N·m |
| নমিনাল স্পিড | 380 rpm |
| সর্বাধিক নো-লোড স্পিড | 560 rpm |
| হ্রাস অনুপাত | 1:25 |
| পোল জোড়া | 7 |
| ফেজ ইন্ডাকট্যান্স | 75 μH |
| ফেজ রেজিস্ট্যান্স | 0 | html 2915 Ω
| সর্বাধিক রেডিয়াল লোড | 395 N |
| বাহ্যিক ব্যাস | 28 mm |
| উচ্চতা | 77.6 mm |
| মোটরের ওজন | 172.2 g |
| এনকোডার প্রকার | ইনক্রিমেন্টাল এনকোডার |
| নিয়ন্ত্রণ ইন্টারফেস | CAN@1 Mbps (সর্বাধিক), FD CAN@5 Mbps (সর্বাধিক) |
| কনফিগারেশন ইন্টারফেস | UART@921600 bps |
| নিয়ন্ত্রণ মোড | MIT মোড; স্পিড মোড; পজিশন মোড |
সুরক্ষা
- ড্রাইভ অতিরিক্ত তাপমাত্রা সুরক্ষা; সুরক্ষা তাপমাত্রা: 120 °C। অতিরিক্ত তাপমাত্রা "এনেবল মোড" থেকে বেরিয়ে যায়।
- মোটর অতিরিক্ত তাপমাত্রা সুরক্ষা; ব্যবহার অনুযায়ী সেট করুন (সর্বাধিক 100 °C অতিক্রম না করার জন্য সুপারিশ করা হয়)। অতিরিক্ত তাপমাত্রা "এনেবল মোড" থেকে বেরিয়ে যায়।
- মোটর অতিরিক্ত ভোল্টেজ সুরক্ষা; ব্যবহার অনুযায়ী সেট করুন (সর্বাধিক 60 V অতিক্রম না করার জন্য সুপারিশ করা হয়)। অতিরিক্ত ভোল্টেজ "এনেবল মোড" থেকে বেরিয়ে যায়। html
- যোগাযোগ হারানোর সুরক্ষা; যদি নির্ধারিত সময়ের মধ্যে কোন CAN কমান্ড পাওয়া না যায়, তবে সিস্টেম "সক্রিয় মোড" থেকে বেরিয়ে আসে।
- মোটর অতিরিক্ত-বর্তমান সুরক্ষা; ব্যবহারের প্রয়োজনীয়তার ভিত্তিতে সেট করুন (প্রস্তাবিত 13 A এর বেশি না হওয়া)। অতিরিক্ত বর্তমান "সক্রিয় মোড" থেকে বেরিয়ে আসে।
- মোটর নিম্ন-ভোল্টেজ সুরক্ষা; যদি সরবরাহ ভোল্টেজ নির্ধারিত মানের চেয়ে কম হয়, তবে "সক্রিয় মোড" থেকে বেরিয়ে আসুন (শক্তি সরবরাহ ভোল্টেজ 15 V এর কম নয়)।
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবোটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- AGV যানবাহন
- ARU রোবট
ম্যানুয়াল এবং ডাউনলোড
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_instalation_drawing.pdf
- DM-2325_armature_instalation_drawing.pdf
ইনস্টলেশন ড্রয়িং
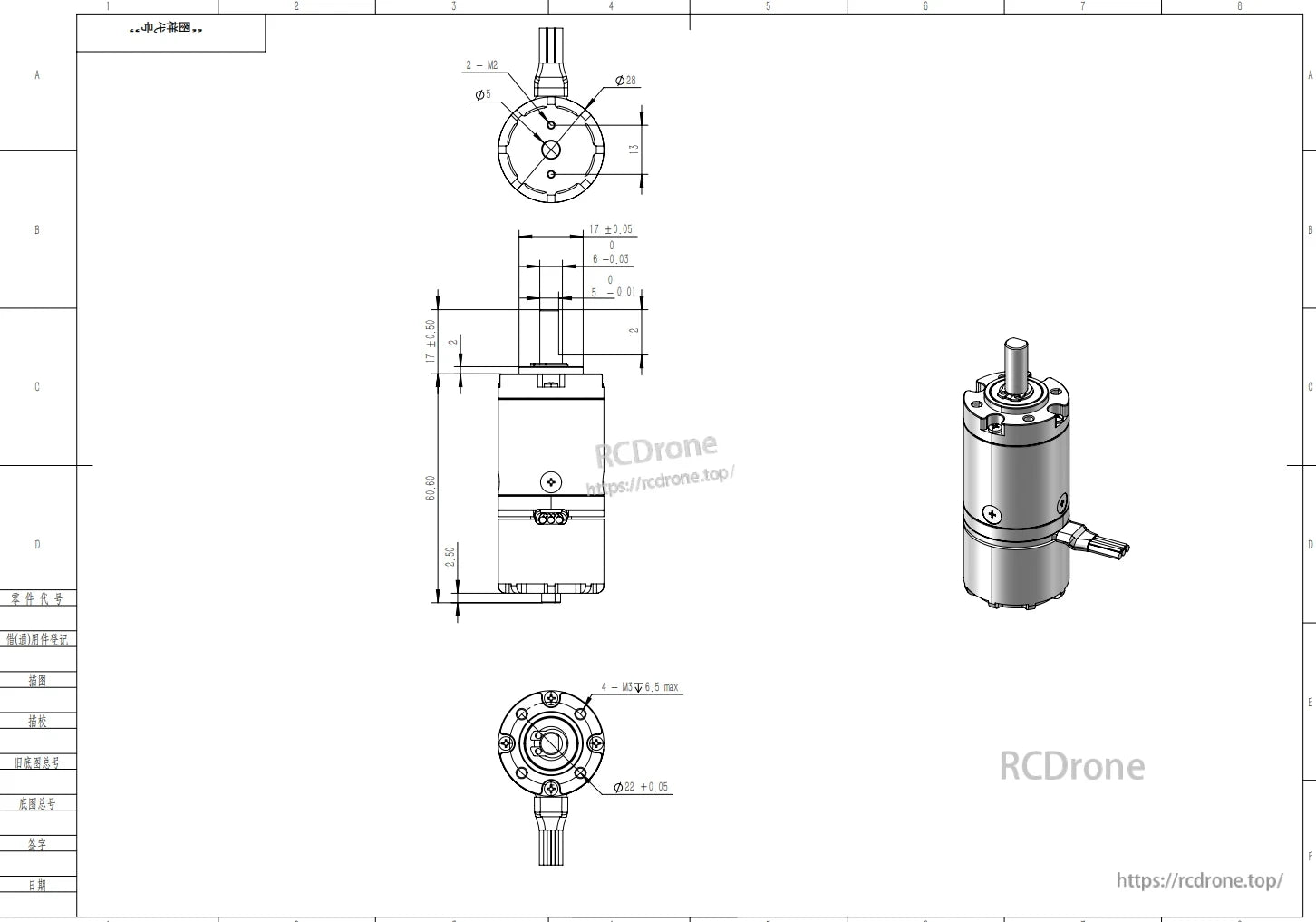
রোবট মোটরের প্রযুক্তিগত ড্রয়িং, মাত্রা এবং স্পেসিফিকেশন সহ
রোবট মোটরের প্রযুক্তিগত অঙ্কন মাত্রা এবং স্পেসিফিকেশন সহ

রোবট মোটরের প্রযুক্তিগত অঙ্কন মাত্রা এবং 3D ভিউ সহ
Related Collections




- Choosing a selection results in a full page refresh.
- Opens in a new window.