




DFRobot SEN0142 MPU6050 ৬ DOF জাইরোস্কোপ অ্যাক্সেলোমিটার IMU মডিউল I2C ডিজিটাল মোশন প্রসেসর সহ Arduino & রোবোটিক্সের জন্য
DFRobot SEN0142 MPU6050 ৬ DOF জাইরোস্কোপ অ্যাক্সেলোমিটার IMU মডিউল I2C ডিজিটাল মোশন প্রসেসর সহ Arduino & রোবোটিক্সের জন্য
DFRobot
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
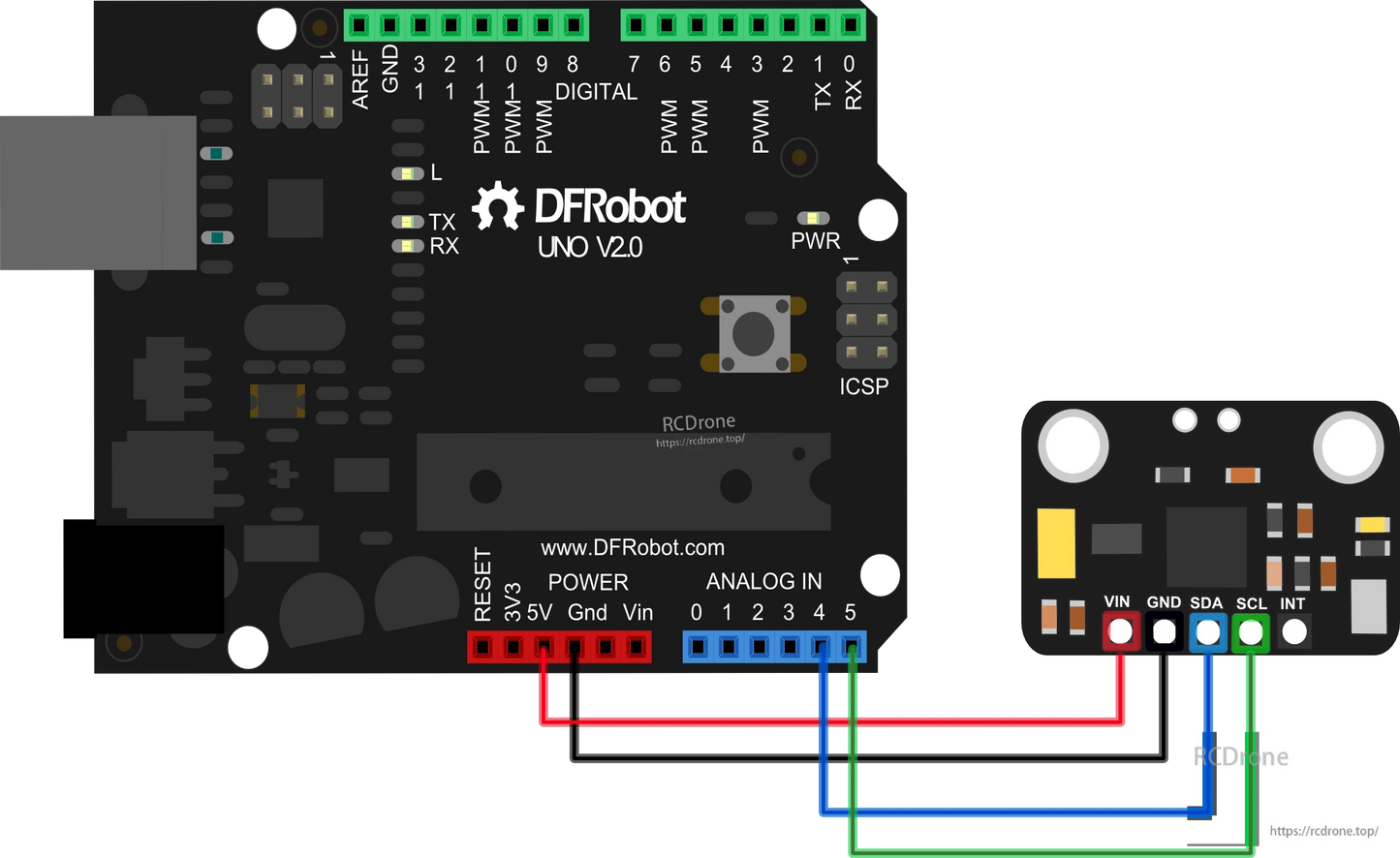
DFRobot SEN0142 MPU6050 6 DOF IMU মডিউল একটি 3-অক্ষ জাইরোস্কোপ এবং 3-অক্ষ অ্যাক্সেলরোমিটার একক চিপে সংহত করে, রোবোটিক্স, ড্রোন, পরিধানযোগ্য ডিভাইস এবং আর্ডুইনো প্রকল্পের জন্য সঠিক গতির সংবেদন প্রদান করে। এতে একটি ডিজিটাল মোশন প্রসেসর (DMP) রয়েছে, যা উন্নত 6-অক্ষ এবং 9-অক্ষ মোশনফিউশন অ্যালগরিদম সমর্থন করে, কোয়ার্ন্টারিয়ন, ইউলার কোণ এবং কাঁচা সেন্সর ডেটা আউটপুট সক্ষম করে। 3V–5V এর বিস্তৃত ইনপুট ভোল্টেজ পরিসরের সাথে, MPU6050 সরাসরি আর্ডুইনো এবং অন্যান্য মাইক্রোকন্ট্রোলারগুলির সাথে সংযুক্ত করা যেতে পারে বাস্তব সময়ের গতির ট্র্যাকিং এবং অঙ্গভঙ্গি সনাক্তকরণের জন্য।
মূল বৈশিষ্ট্য
-
একটি চিপে 3-অক্ষ জাইরোস্কোপ এবং 3-অক্ষ অ্যাক্সিলেরোমিটার সংযুক্ত করে
-
প্রোগ্রামেবল অ্যাক্সিলেরোমিটার পরিসর: ±2g, ±4g, ±8g, ±16g
-
জাইরোস্কোপ সংবেদনশীলতা: ±250, ±500, ±1000, ±2000 dps
-
ডিজিটাল মোশন প্রসেসর (DMP) অনবোর্ড মোশনফিউশন এবং জেসচার স্বীকৃতির জন্য
-
I2C ডিজিটাল ইন্টারফেস ম্যাট্রিক্স, কোয়াটার্নিয়ন, ইউলার, এবং কাঁচা ডেটা ফরম্যাট সমর্থন করে
-
এম্বেডেড বায়াস &এম্প; কম্পাস ক্যালিব্রেশন উন্নত সঠিকতার জন্য
-
Arduino এবং পরিধানযোগ্য ইলেকট্রনিক্সের সাথে সামঞ্জস্যপূর্ণ I2Cdevlib
এর মাধ্যমে
স্পেসিফিকেশন
-
কাজের ভোল্টেজ: 3–5 V
আউটপুট: I2C ডিজিটাল (6/9-অক্ষ মোশনফিউশন ডেটা)
-
অ্যাক্সিলেরোমিটার: ±2g / ±4g / ±8g / ±16g প্রোগ্রামেবল রেঞ্জ
-
জাইরোস্কোপ: ±250 / ±500 / ±1000 / ±2000 dps সংবেদনশীলতা
-
ডেটা ফরম্যাট: রোটেশন ম্যাট্রিক্স, কুয়ার্টার্নিয়ন, ইউলার কোণ, কাঁচা ডেটা
-
আকার: 14 × 21 মিমি
অ্যাপ্লিকেশন
-
রোবোটিক্স মোশন সেন্সিং
-
আর্ডুইনো &এবং DIY ইলেকট্রনিক প্রকল্প
-
মানব-কম্পিউটার ইন্টারঅ্যাকশন (HCI)
-
পরিধানযোগ্য ডিভাইস এবং জেসচার নিয়ন্ত্রণ
-
নেভিগেশন এবং ব্যালেন্সিং সিস্টেম (e.g., সেগওয়ে-প্রকার পরিবহনকারী)
-
ড্রোন স্থিতিশীলতা এবং গতিশীলতা ট্র্যাকিং
বিস্তারিত



নমুনা কোড
দয়া করে প্রথমে সমস্ত IMU সেন্সরের জন্য লাইব্রেরি ডাউনলোড করুন!




- Choosing a selection results in a full page refresh.
- Opens in a new window.