F450-4B রাস্পবেরি পাই প্রোগ্রামেবল ড্রোন ডেভেলপমেন্ট কিট - Pixhawk DIY Ardupilot ইন্ডাস্ট্রিয়াল ওপেন সোর্স ড্রোন প্ল্যাটফর্ম
F450-4B রাস্পবেরি পাই প্রোগ্রামেবল ড্রোন ডেভেলপমেন্ট কিট - Pixhawk DIY Ardupilot ইন্ডাস্ট্রিয়াল ওপেন সোর্স ড্রোন প্ল্যাটফর্ম
RCDrone
পিকআপের উপলভ্যতা লোড করা যায়নি
ওভারভিউ
দ F450-4B রাস্পবেরি পাই ড্রোন একটি উন্নত DIY ড্রোন কিট যে একটি শক্তিশালী সমন্বয় রাস্পবেরি পাই 4B বহুমুখী সঙ্গে অনবোর্ড কম্পিউটার Pixhawk 2.4.8 ফ্লাইট কন্ট্রোলার, এটি একটি অত্যন্ত কাস্টমাইজযোগ্য করে তোলে এবং প্রোগ্রামেবল ড্রোন প্ল্যাটফর্ম এই ওপেন সোর্স ড্রোন প্ল্যাটফর্ম মত অত্যাধুনিক সরঞ্জাম সমর্থন করে ড্রোনকিট-অজগর, ডেভেলপারদের স্বায়ত্তশাসিত মিশন, রিয়েল-টাইম ডেটা ট্রান্সমিশন এবং এআই-চালিত ইমেজ প্রসেসিং অ্যাপ্লিকেশন তৈরি করতে সক্ষম করে। একটি শক্তিশালী 450 মিমি ফ্রেম, একটি 200 এমপি এইচডি ক্যামেরা, 20 মিনিট পর্যন্ত ফ্লাইটের জন্য একটি 3S 5200mAh ব্যাটারি এবং উচ্চতা ধরে রাখা, বাড়িতে ফিরে যাওয়া এবং সার্কেল মোডের মতো উন্নত ফ্লাইট মোড সহ, F450 ড্রোন কিট হল আদর্শ পছন্দ। উত্সাহী, গবেষক এবং শিক্ষাবিদরা একটি উদ্ভাবনী ড্রোন বিকাশের অভিজ্ঞতা খুঁজছেন।
মূল বৈশিষ্ট্য
উচ্চ কর্মক্ষমতা হার্ডওয়্যার
- রাস্পবেরি পাই 4B: একটি 64-বিট 1.5GHz কোয়াড-কোর প্রসেসর দ্বারা চালিত, 4K ভিডিও আউটপুট এবং নির্ভরযোগ্য অপারেশনের জন্য উচ্চ-গতির ওয়াইফাই যোগাযোগ সমর্থন করে৷
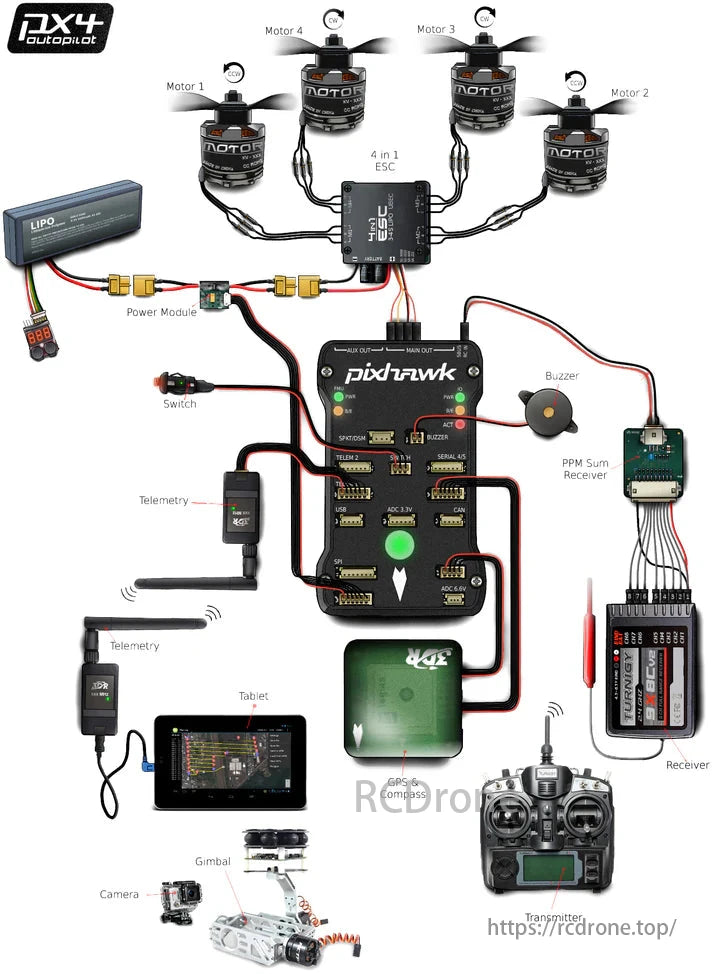
- Pixhawk 2.4.8 ফ্লাইট কন্ট্রোলার: একাধিক সমন্বিত সেন্সর দিয়ে সজ্জিত, সুনির্দিষ্ট মনোভাব নিয়ন্ত্রণ, হোভারিং এবং মিশন পরিকল্পনা নিশ্চিত করে।
- দৃষ্টি সম্প্রসারণ সমর্থন: একটি মনোকুলার ক্যামেরা এবং OpenCV টুলের সাথে যুক্ত, এই কিটটি রিয়েল-টাইম ইমেজ ট্রান্সমিশন এবং প্রক্রিয়াকরণের চাহিদা পূরণ করে।
বিভিন্ন ফ্লাইট মোড
- উচ্চতা হোল্ড (AltHold): একটি স্থিতিশীল ফ্লাইট উচ্চতা বজায় রাখে।
- হোভার: সুনির্দিষ্ট স্থির হোভারিং প্রদান করে।
- বাড়িতে ফিরে আসা (ফিরানো): স্বয়ংক্রিয়ভাবে সংকেত হারানো বা কম ব্যাটারির সময় শুরু বিন্দু ফিরে.
- অবতরণ (ভূমি): মসৃণ স্বায়ত্তশাসিত অবতরণ কার্যকর করে।
- স্থিতিশীলতা মোড: স্বয়ংক্রিয়ভাবে ফ্লাইটের মনোভাব সামঞ্জস্য করে।
- বৃত্ত মোড: একটি লক্ষ্যের চারপাশে বৃত্তাকার ফ্লাইট সম্পাদন করে।
- হেডলেস মোড: সহজ নিয়ন্ত্রণের জন্য নির্দেশমূলক সীমাবদ্ধতা দূর করে।
- নিয়ন্ত্রণের বাইরে রিটার্ন: সংকেত হারিয়ে গেলে পূর্বনির্ধারিত অবস্থানে ফিরে আসে।
- লো পাওয়ার ল্যান্ডিং: কম ব্যাটারি অবস্থায় নিরাপদে অবতরণ.
ডেটা ট্রান্সমিশন এবং ইমেজ প্রসেসিং
- বাহ্যিক রাউটারের প্রয়োজন ছাড়াই বিল্ট-ইন হটস্পটের মাধ্যমে একটি স্থানীয় ওয়াইফাই নেটওয়ার্ক স্থাপন করে, রিয়েল-টাইম ডেটা এবং ইমেজ ট্রান্সমিশন সক্ষম করে।
- OpenCV-ভিত্তিক ভিডিও স্ট্রিমিং এবং বিশ্লেষণ সমর্থন করে, ইমেজ পর্যবেক্ষণ এবং বুদ্ধিমান অ্যাপ্লিকেশনের জন্য আদর্শ।
স্পেসিফিকেশন
ড্রোন পরামিতি
| প্যারামিটার | বিস্তারিত |
|---|---|
| নাম | F450 ড্রোন কিট |
| হুইলবেস | 450 মিমি |
| ওজন | 1493g (ব্যাটারি এবং রাস্পবেরি পাই 4B সহ) |
| ফ্লাইট কন্ট্রোলার | পিক্সহক 2.4।8 ওপেন সোর্স ফ্লাইট কন্ট্রোলার |
| অনবোর্ড কম্পিউটার | রাস্পবেরি পাই 4B |
| ক্যামেরা | 200MP HD 1080P |
| হোভারিং সমর্থন | অপটিক্যাল ফ্লো মডিউল এবং লেজার দূরত্ব সেন্সর |
| জিপিএস মডিউল | m8n জিপিএস |
| ফ্লাইট সময় | ~20 মিনিট (পরিবেশ এবং মিশনের উপর নির্ভর করে) |
| ব্যাটারি | 3S 5200mAh (11.1V) |
| পেলোড ক্ষমতা | 500 গ্রাম |
| বায়ু প্রতিরোধের | লেভেল 3-4 |
| মোটর | SunnySky A2212 |
| ইএসসি | Hobbywing 20A ESC (3S-4S LiPo ব্যাটারি সমর্থন করে) |
| প্রোপেলার | T1045 স্ব-লকিং প্রোপেলার |
| সর্বোচ্চ উচ্চতা | 2000m (হস্তক্ষেপ মুক্ত) |
| ফ্লাইট রেঞ্জ | 1000 মি |
| ফ্লাইট দৃশ্যকল্প | ইনডোর/আউটডোর |
Pixhawk 2.4.8 ফ্লাইট কন্ট্রোলার স্পেসিফিকেশন
- প্রসেসর: 32-বিট ARM STM32F427 Cortex M4, 168MHz, 256KB RAM
- সেন্সর:
- L3GD20 3-অক্ষ 6DOF জাইরোস্কোপ
- LSM303D 3-অক্ষ 14-বিট অ্যাক্সিলোমিটার/ম্যাগনেটোমিটার
- MPU6000 6-অক্ষ অ্যাক্সিলোমিটার/ম্যাগনেটোমিটার
- MS5611 উচ্চ-নির্ভুলতা ব্যারোমিটার
- গ্রাউন্ড কন্ট্রোল সামঞ্জস্য: QGroundControl, MissionPlanner
- মাত্রা: 81 মিমি x 47 মিমি x 16 মিমি; ওজন: 37 গ্রাম
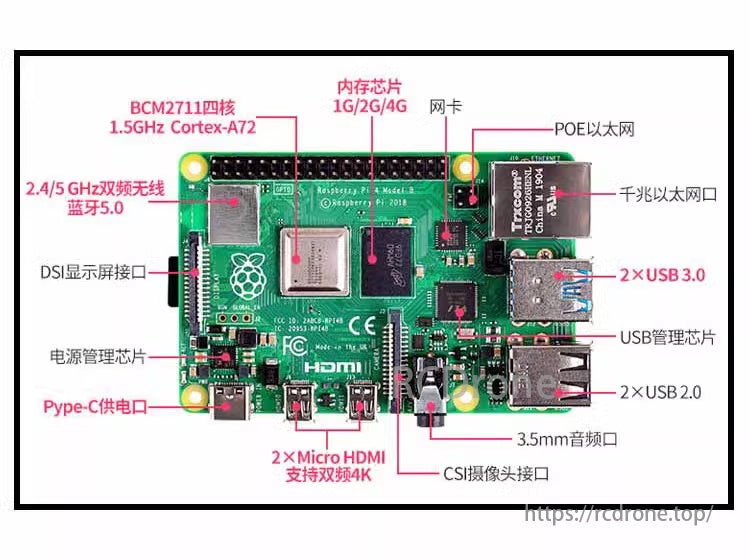
রাস্পবেরি পাই 4B স্পেসিফিকেশন
- চিপসেট: ব্রডকম BCM2711
- সিপিইউ: 64-বিট 1.5GHz কোয়াড-কোর
- জিপিইউ: 500MHz ভিডিওকোর VI
- RAM: 4GB DDR4
- ইন্টারফেস: 2 x USB 3.0, 2 x USB 2.0
- ভিডিও আউটপুট: ডুয়াল মাইক্রো HDMI পোর্ট, সমর্থন করে 4K@60Hz
- যোগাযোগ: ব্লুটুথ 5.0, ওয়াইফাই 5 (2.4/5GHz)
- পাওয়ার সাপ্লাই: USB Type-C (5V 3A)
প্যাকেজ অন্তর্ভুক্ত
কনফিগারেশন 1: FlySky i6 রিমোট এবং টেলিমেট্রি সহ SunnySky A2212 মোটর
- ল্যান্ডিং গিয়ার সহ F450 ফ্রেম
- SunnySky A2212 মোটর (4 পিসি)
- Hobbywing 20A ESCs (4 পিসি)
- T1045 স্ব-লকিং প্রপেলার (4 জোড়া)
- PIX M8n GPS মডিউল
- কম্পন-স্যাঁতসেঁতে প্লেট
- FlySky i6 রিমোট কন্ট্রোলার
- 3S 5200mAh ব্যাটারি
- B3 ব্যালেন্স চার্জার
- জিপিএস মাউন্ট
- এফএস ভোল্টেজ টেলিমেট্রি মডিউল

অন্তর্ভুক্ত: ব্যাটারি স্ট্র্যাপ, নাইলন তারের বন্ধন, কাঠের প্যাড, 3M আঠালো টেপ, বুজার, ইনস্টলেশন সরঞ্জাম
সমাবেশ এবং ডিবাগিং ভিডিও, সম্পর্কিত উপকরণ প্রদান; সোর্স কোডের জন্য গ্রাহক পরিষেবার সাথে যোগাযোগ করুন।
কনফিগারেশন 2: Radiolink PRO সহ SunnySky A2212 মোটর
- ল্যান্ডিং গিয়ার সহ F450 ফ্রেম
- SunnySky A2212 মোটর (4 পিসি)
- Hobbywing 20A ESCs (4 পিসি)
- 9450 স্ব-লকিং প্রপেলার (3 জোড়া)
- পিক্স।M8n GPS মডিউল কিট
- কম্পন-স্যাঁতসেঁতে প্লেট
- Radiolink PRO (R9DS রিসিভার)
- 3S 2200mAh কন্ট্রোল ব্যাটারি
- 3S 5200mAh ব্যাটারি
- B3 ব্যালেন্স চার্জার
- জিপিএস মাউন্ট

অন্তর্ভুক্ত: ব্যাটারি স্ট্র্যাপ, নাইলন তারের বন্ধন, কাঠের প্যাড, 3M আঠালো টেপ, বুজার, ইনস্টলেশন সরঞ্জাম
সমাবেশ এবং ডিবাগিং ভিডিও, সম্পর্কিত উপকরণ প্রদান; সোর্স কোডের জন্য গ্রাহক পরিষেবার সাথে যোগাযোগ করুন।
F450 ড্রোন কিট সমাবেশ
অ্যাপ্লিকেশন দৃশ্যকল্প
F450-4B ড্রোন ডেভেলপমেন্ট কিট এর জন্য আদর্শ:
- ড্রোন R&D: বিশ্ববিদ্যালয় গবেষণা, ফ্লাইট কন্ট্রোলার টেস্টিং, অ্যালগরিদম উন্নয়ন।
- বুদ্ধিমান অ্যাপ্লিকেশন: পথ পরিকল্পনা, লক্ষ্য স্বীকৃতি, এবং বাধা এড়ানো।
- শিক্ষাগত পরীক্ষা: প্রোগ্রামিং, হার্ডওয়্যার সমাবেশ, এবং ডিবাগিং।
- ক্ষেত্র ব্যবহার: ইনডোর হোভারিং, আউটডোর সার্ভে, কৃষি পর্যবেক্ষণ, এবং আরও অনেক কিছু।
বিস্তারিত
F450-4B রাস্পবেরি পাই ড্রোন ডেভেলপমেন্ট প্ল্যাটফর্ম
F450 হল একটি ক্লাসিক এবং সাধারণভাবে ব্যবহৃত ড্রোন মডেল, যা সহজ এবং সুবিধাজনক সমাবেশ, উচ্চ মূল্যের কর্মক্ষমতা, শক্তিশালী ব্যবহারিকতা এবং নতুনদের দ্রুত ড্রোন অপারেশন শুরু করার জন্য উপযুক্ততা প্রদান করে।

আপগ্রেড করা Raspberry Pi 4B
রাস্পবেরি পাই 4B হার্ডওয়্যার প্রক্রিয়াকরণ শক্তি 3B+ এর চেয়ে উল্লেখযোগ্যভাবে শক্তিশালী।
রাস্পবেরি পাই সর্বশেষ ওপেন সোর্স সিস্টেমের সাথে সজ্জিত উবুন্টু 20.04, উবুন্টু মেট সিস্টেমের তুলনায় একটি মসৃণ অভিজ্ঞতা প্রদান করে।

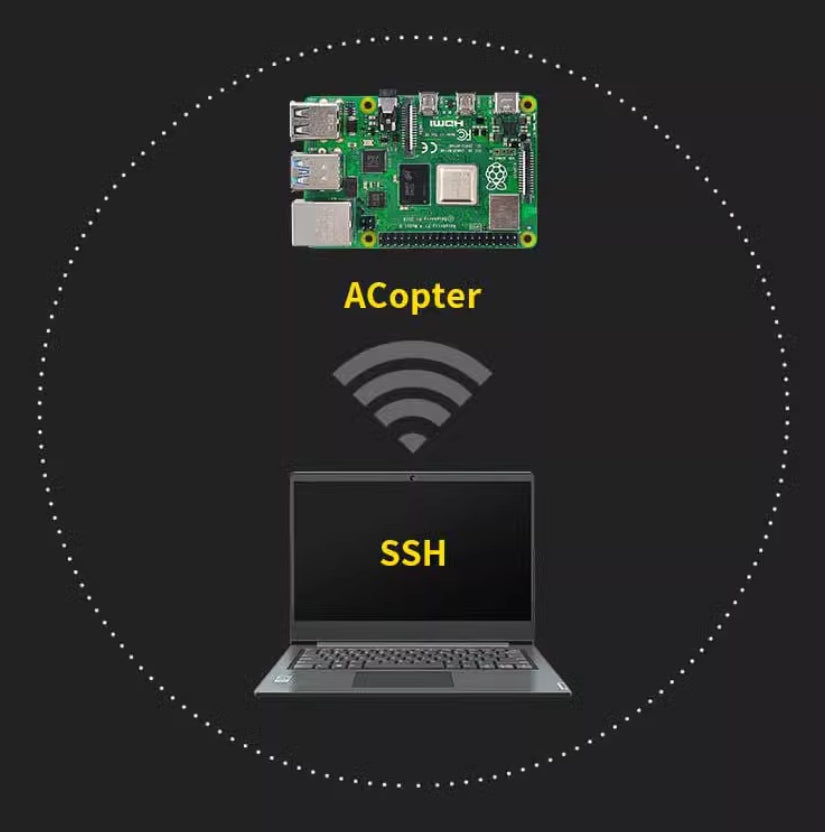
সিস্টেম সক্ষম ওয়াইফাই হটস্পট (অ্যাকপ্টার)
Raspberry Pi 4B এর ওয়াইফাই ক্ষমতা ব্যবহার করে একটি স্ব-নির্মিত হটস্পট (অ্যাকপ্টার) তৈরি করা হয়েছে। পিসি সরাসরি 4B এর ওয়াইফাই হটস্পটের সাথে সংযুক্ত হতে পারে একটি স্থানীয় নেটওয়ার্ক তৈরি করতে এবং রাস্পবেরি পাইতে দূরবর্তী অ্যাক্সেসের জন্য SSH কমান্ড ব্যবহার করতে পারে। নেটওয়ার্ক কনফিগারেশনের জন্য একটি রাউটার প্রয়োজন এমন 3B+ মডেলের বিপরীতে, এই সেটআপটি নতুনদের জন্য অনেক সহজ এবং ব্যবহারকারী-বান্ধব।
OpenCV ভিজ্যুয়াল প্রসেসিং
একটি মনোকুলার ক্যামেরা যোগ করা হয়েছে, যা ইমেজ ট্রান্সমিশন এবং পোস্ট-প্রসেসিং সক্ষম করে। ভিডিও স্ট্রীম রাস্পবেরি পাই এর মাধ্যমে ক্যাপচার করা যায় এবং OpenCV এর মত টুল ব্যবহার করে প্রক্রিয়া করা যায়। রিয়েল-টাইম এইচডি ভিডিও স্ট্রিমগুলি প্রক্রিয়াকরণের জন্য পিসিতে বা দেখার জন্য মোবাইল ডিভাইসে প্রেরণ করা যেতে পারে।

আরও সম্প্রসারণ ইন্টারফেস
রাস্পবেরি পাই 4B বিস্তৃত এক্সপেনশন ইন্টারফেসের অফার করে, যার মধ্যে রয়েছে ডুয়াল USB 3.0 পোর্ট, ডুয়াল 4K মাইক্রো HDMI পোর্ট, CSI এবং DSI ইন্টারফেস, গিগাবিট ইথারনেট এবং একটি টাইপ-সি পাওয়ার সাপ্লাই, যা বিভিন্ন অ্যাপ্লিকেশনের জন্য ব্যতিক্রমী বহুমুখিতা প্রদান করে।
একক ক্যামেরা সংস্করণ
একক ক্যামেরা সংস্করণে একটি রাস্পবেরি পাই 4B এবং একটি মনোকুলার ক্যামেরা রয়েছে, যা ফ্লাইট কন্ট্রোলারের সাথে সিরিয়াল পোর্টের মাধ্যমে যোগাযোগ সক্ষম করে। এটি ভিজ্যুয়াল প্রসেসিং, পাইথন প্রোগ্রামিং এবং যোগাযোগের মতো কাজগুলিকে সমর্থন করে। এই সংস্করণটি Pixhawk ব্যবহার করার পূর্ব অভিজ্ঞতা, উবুন্টু (লিনাক্স), OpenCV, রাস্পবেরি পাই এবং লোকাল এরিয়া নেটওয়ার্ক যোগাযোগের প্রাথমিক জ্ঞান সহ ব্যবহারকারীদের জন্য উপযুক্ত।
মৌলিক বৈশিষ্ট্যগুলি ছাড়াও, একক ক্যামেরা সংস্করণটি ওয়াইফাইয়ের মাধ্যমে ইমেজ এবং ডেটা ট্রান্সমিশন সমর্থন করে এবং এর মাধ্যমে ড্রোন নিয়ন্ত্রণ করতে দেয় ড্রোনকিট-অজগর প্রোগ্রামিং

অপটিক্যাল ফ্লো পজিশনিং
অপটিক্যাল ফ্লো পজিশনিং কন্ডিশনের অধীনে ড্রোনকিট-পাইথনের সাথে ইনডোর হোভারিং নিয়ন্ত্রণ

এই ড্রোন ডেভেলপমেন্ট প্ল্যাটফর্ম সমর্থন করে ROS, পাইথন প্রোগ্রামিং, OpenCV ইমেজ স্বীকৃতি, 4G দূর-দূরত্বের ট্রান্সমিশন, এবং Aruco 2D কোড চাক্ষুষ নির্দেশিত অবতরণ, এটি অত্যন্ত বহুমুখী এবং উদ্ভাবনী করে তোলে।

FlySky i6 রিমোট কন্ট্রোলার
10-চ্যানেল ফার্মওয়্যার, ভোল্টেজ টেলিমেট্রি মডিউল এবং 1000 মিটারের বেশি রিমোট কন্ট্রোল রেঞ্জ সহ প্রিলোড করা একটি ia6b রিসিভার দিয়ে সজ্জিত, নতুনদের শিখতে এবং অনুশীলন করার জন্য আদর্শ।

Radiolink AT9S রিমোট কন্ট্রোলার
2000m-এর বেশি নিয়ন্ত্রণ পরিসর সহ 10টি চ্যানেলের বৈশিষ্ট্য। একটি টেলিমেট্রি মডিউল দিয়ে সজ্জিত যা ব্যাটারি ভোল্টেজ, GPS স্যাটেলাইট গণনা, ফ্লাইট উচ্চতা, স্থানাঙ্ক, ফ্লাইট মোড এবং আরও অনেক কিছুর ডেটা সরবরাহ করে।

FAQ
1. আমি কি সেকেন্ডারি ডেভেলপমেন্ট করতে পারি? আমি কি স্বাধীনভাবে প্রোগ্রাম করতে পারি?
উত্তর হল হ্যাঁ। পূর্বে চালু করা হয়েছে, Ardupilot বর্তমানে সর্বাধিক ব্যবহৃত ওপেন সোর্স ফ্লাইট কন্ট্রোল সিস্টেম, এবং এই সিস্টেমের উপর ভিত্তি করে অনেক চমৎকার দেশীয় এবং আন্তর্জাতিক ড্রোন মডেল তৈরি করা হয়েছে।
মাধ্যমিক উন্নয়নের প্রধানত দুটি দিক রয়েছে: ফ্লাইট নিয়ন্ত্রণ উন্নয়ন এবং বহিরাগত সম্প্রসারণ।
- ফ্লাইট কন্ট্রোল ডেভেলপমেন্ট
আমরা Ardupilot ব্যবহার করি, তাই ওপেন-সোর্স ফ্লাইট কন্ট্রোল ডেভেলপমেন্ট শেখার জন্য প্রাথমিকভাবে Ardupilot ওপেন-সোর্স প্রকল্প অধ্যয়ন করা জড়িত।
- উন্নত গণিত (বিচ্ছিন্ন গণিত, পুনরাবৃত্তি, লিনিয়ারাইজেশন), কালমান ফিল্টারিং এবং এমবেডেড বিকাশের জ্ঞান সহ শক্তিশালী প্রোগ্রামিং দক্ষতা প্রয়োজন (সোর্স কোডটি C++ এ রয়েছে)।
- একটি শক্ত তাত্ত্বিক ভিত্তি প্রয়োজন। এটি আপনাকে মনুষ্যবিহীন সিস্টেম ডেভেলপমেন্ট এবং ফ্লাইট কন্ট্রোল R&D-এ কাজ করার জন্য প্রস্তুত করে।
আপনি যদি ফ্লাইট কন্ট্রোল ডেভেলপমেন্টে ফোকাস করতে চান, তবে বেশিরভাগ কাজ আপনার কম্পিউটারে করতে হবে:
- প্রোগ্রামিং এনভায়রনমেন্ট সেট আপ করা, ফ্লাইট কন্ট্রোল সোর্স কোড ডাউনলোড করা, এর আর্কিটেকচার এবং কার্যকরী মডিউল অধ্যয়ন করা ইত্যাদি।
- কোড ফ্রেমওয়ার্কের সাথে পরিচিত হয়ে গেলে, আপনি বিদ্যমান কোডের উপর ভিত্তি করে প্রোগ্রামিং শুরু করতে পারেন।
একটি বেসিক ফ্লাইট কন্ট্রোল মডেল দিয়ে শুরু করুন এবং নির্দেশিকা দেওয়ার জন্য আমাদের দেওয়া Ardupilot ফ্লাইট কন্ট্রোল পাঠ্যপুস্তক দেখুন।
- বাহ্যিক সম্প্রসারণ উন্নয়ন
বাহ্যিক সম্প্রসারণ আপনাকে ফ্লাইট কন্ট্রোলারের সংরক্ষিত ইন্টারফেসের মাধ্যমে আপনার কাজ এবং পরিস্থিতির উপর ভিত্তি করে বাহ্যিক ডিভাইস যোগ করতে দেয়। যেমন:
- ইনডোর পজিশনিং এবং হোভার করার জন্য একটি অপটিক্যাল ফ্লো মডিউল যোগ করুন।
- বাধা এড়ানোর জন্য একটি লেজার রাডার যোগ করুন।
- স্বায়ত্তশাসিত ফ্লাইট এবং রুট পরিকল্পনা সক্ষম করতে টেলিমেট্রি ব্যবহার করুন।
- একটি অনবোর্ড কম্পিউটার ইনস্টল করুন (যেমন, রাস্পবেরি পাই) এবং ড্রোন নিয়ন্ত্রণের জন্য প্রোগ্রাম করতে ড্রোনকিট-পাইথন বা ROS ব্যবহার করুন।
একটি অনবোর্ড কম্পিউটার যোগ করার লক্ষ্য হল আরও জটিল কাজগুলি পরিচালনা করা, যেমন:
- চাক্ষুষ স্বীকৃতির জন্য রাস্পবেরি পাই ক্যামেরা ব্যবহার করা (OpenCV, YOLO, ইত্যাদি প্রয়োজন)।
- ড্রোনের ফ্লাইট নিয়ন্ত্রণ করতে যোগাযোগ প্রোটোকলের সমন্বয়।
- নেটওয়ার্কের মাধ্যমে ফ্লাইট ডেটা বা হাই-ডেফিনিশন ভিডিও প্রেরণ করা।
এই ফাংশনগুলি শুধুমাত্র ফ্লাইট কন্ট্রোলারের উপর নির্ভর করে অর্জন করা যায় না।
বাহ্যিক সম্প্রসারণ অধ্যয়ন প্রধানত অ্যাপ্লিকেশনগুলিতে ফোকাস করে, যা দেশব্যাপী বেশিরভাগ প্রতিযোগিতার দিকনির্দেশনাও।শেখার পরে, আপনি বুদ্ধিমান ড্রোনগুলির গুরুত্বপূর্ণ ক্ষেত্রগুলি অন্বেষণ করতে পারেন, যেমন ভিজ্যুয়াল স্বীকৃতি, ড্রোনের সাথে এআই ইন্টিগ্রেশন এবং আরও অনেক কিছু।
2. স্বাধীন উন্নয়নের পূর্বশর্ত কি?
ড্রোন সম্পর্কে শেখা একটি ধীরে ধীরে প্রক্রিয়া। ড্রোন সিস্টেমগুলি আন্তঃবিভাগীয় এবং সমন্বিত, জ্ঞানের ক্ষেত্রগুলির একটি বিস্তৃত পরিসর জড়িত। ড্রোন উন্নয়ন শিখতে, নিম্নলিখিত ভিত্তি প্রয়োজন:
- সোল্ডারিং আয়রন, বিভিন্ন স্ক্রু ড্রাইভার এবং অন্যান্য সরঞ্জাম ব্যবহারে দক্ষতা সহ প্রাথমিক হ্যান্ড-অন দক্ষতা।
- ইলেকট্রনিক্সের প্রাথমিক জ্ঞান: ভোল্টেজ, কারেন্ট, পাওয়ার, পোলারিটি এবং সিগন্যালের মত ধারণা।
- অটোমেশন নিয়ন্ত্রণের মৌলিক জ্ঞান: পিআইডি নিয়ন্ত্রণ, প্রতিক্রিয়া, ডিজিটাল সংকেত, অ্যানালগ সংকেত ইত্যাদি।
- প্রাথমিক কম্পিউটার দক্ষতা: ড্রাইভার, সিরিয়াল পোর্ট, বড রেট, ফার্মওয়্যার সংস্করণ, সফ্টওয়্যার সংস্করণ।
- Pixhawk ড্রোন সম্পর্কে প্রাথমিক জ্ঞান।
- উবুন্টু অপারেটিং সিস্টেমের প্রাথমিক জ্ঞান।
- প্রোগ্রামিং ভাষার দক্ষতা: যেমন C++ এবং পাইথন।
রেসবেরি পিআই ড্রোন কীভাবে তৈরি করবেন?
Related Collections