


উচ্চ টর্ক HTDW-5047 উচ্চ টর্ক মোটর মডিউল ৫০মিমি ১২-৪৮V ১৪-বিট এনকোডার ৯/২০/৩৬ অনুপাত
উচ্চ টর্ক HTDW-5047 উচ্চ টর্ক মোটর মডিউল ৫০মিমি ১২-৪৮V ১৪-বিট এনকোডার ৯/২০/৩৬ অনুপাত
HIGH TORQUE
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
এই উচ্চ টর্ক HTDW-5047 মোটর একটি সংক্ষিপ্ত উচ্চ-টর্ক মোটর মডিউল সিরিজ যা তিনটি হ্রাস অনুপাত (9 / 20 / 36) এ উপলব্ধ। এটি 14-বিট ইনপুট/আউটপুট এনকোডার রেজোলিউশন, 12-48V ভোল্টেজ পরিসীমা এবং গতির নিয়ন্ত্রণ এবং রোবোটিক জয়েন্টের জন্য 3kHz নিয়ন্ত্রণ ফ্রিকোয়েন্সি বৈশিষ্ট্যযুক্ত।
মূল বৈশিষ্ট্য
- মডেল: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- কম ব্যাকল্যাশ: <10 আর্কমিন
- পুনরাবৃত্তি অবস্থান নির্ভুলতা: <12 আর্কমিন; আবসিক অবস্থান নির্ভুলতা: <15 আর্কমিন
- এনকোডার রেজোলিউশন: 14-বিট (ইনপুট) এবং 14-বিট (আউটপুট)
- বড রেট: 5 Mbps; প্রতিক্রিয়া সময়: ≤200 us
স্পেসিফিকেশন
| প্যারামিটার | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| দৈর্ঘ্য এবং প্রস্থ | 50mm | 50mm | 50mm |
| উচ্চতা | 47.4mm | 47.4mm | 47mm |
| ওজন | 300g | 322g | 321g |
| ব্যাকল্যাশ | <10 আর্কমিন | <10 আর্কমিন | <10 আর্কমিন |
| পুনরাবৃত্তি অবস্থান নির্ভুলতা | <12 আর্কমিন | <12 আর্কমিন | <12 আর্কমিন |
| অবশ্যই অবস্থান নির্ভুলতা | <15 আর্কমিন | <15 আর্কমিন | <15 আর্কমিন |
| টর্ক কনস্ট্যান্ট | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| পোল জোড়ার সংখ্যা | 14 | 14 | 14 |
| হ্রাস অনুপাত | 9 | 20 | 36 |
| লকড-রোটর টর্ক | 6 Nm | 12 Nm | 21 Nm |
| নো-লোড RPM | 260 RPM | 130 RPM | 60 RPM |
| রেটেড টর্ক | 1 Nm | 2 Nm | 4 Nm |
| রেটেড RPM | 170 RPM | 110 RPM | 40 RPM |
| রেটিং | 18 W | 23 W | 17 W |
| ভোল্টেজ পরিসীমা | 12-48V | 12-48V | 12-48V |
| পিক কারেন্ট | 10 A | 10 A | 10 A |
| গতি নিয়ন্ত্রণ সঠিকতা | ±৮% | ±১৫% | ±১৫% |
| ইনপুট এনকোডার রেজোলিউশন | ১৪-বিট | ১৪-বিট | ১৪-বিট |
| বড রেট | ৫ এমবিপিএস | ৫ এমবিপিএস | ৫ এমবিপিএস |
| রেটেড কারেন্ট | ২ এ | ২ এ | ২ এ |
| নিয়ন্ত্রণ সঠিকতা | ±১০% | ±১৫% | ±১৫% |
| প্রতিক্রিয়া সময় | ≤২০০ µs | ≤২০০ µs | ≤২০০ µs |
| আউটপুট এনকোডার রেজোলিউশন | ১৪-বিট | ১৪-বিট | ১৪-বিট |
| নিয়ন্ত্রণ ফ্রিকোয়েন্সি | ৩ কেজাহার্টজ | ৩ কেজাহার্টজ | ৩ কেজাহার্টজ |
নির্বাচন নির্দেশিকা এবং বিক্রয় পরবর্তী সহায়তার জন্য যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- এজিভি যানবাহন
- এআরইউ রোবট
ম্যানুয়াল
- HTDW-5047-9-NE উচ্চ টর্ক মোটর ডিবাগিং সহায়ক ব্যবহারকারী ম্যানুয়াল (PDF)
- HTDW-5047-20-NE উচ্চ টর্ক মোটর ডিবাগিং সহায়ক ব্যবহারকারী ম্যানুয়াল (PDF)
- HTDW-5047-36-NE উচ্চ টর্ক মোটর ডিবাগিং সহায়ক ব্যবহারকারী ম্যানুয়াল (PDF)
- HTDW-5047-9-NE ডিবাগিং ম্যানুয়াল (PDF)
- HTDW-5047-20-NE ডিবাগিং ম্যানুয়াল (PDF)
- HTDW-5047-36-NE ডিবাগিং ম্যানুয়াল (PDF)
- HTDW-5047-9-NE 1.2 fdcan প্রোটোকল বিশ্লেষণ (PDF)
- HTDW-5047-20-NE 1.2 fdcan প্রোটোকল বিশ্লেষণ (PDF)
- HTDW-5047-36-NE 1.2 fdcan প্রোটোকল বিশ্লেষণ (PDF)
- HTDW-5047-9-NE মোটর 3D মডেল (STP, ZIP)
- HTDW-5047-20-NE মোটর 3D মডেল (STP, ZIP)
- HTDW-5047-36-NE মোটর 3D মডেল (STP, ZIP)
- HTDW-5047 ব্যবহারকারী ম্যানুয়াল (PDF)
বিস্তারিত

HTDW-5047 সিরিজটি একটি কমপ্যাক্ট 50 মিমি ফর্ম ফ্যাক্টরকে উচ্চ টর্কের সাথে রোবোটিক জয়েন্ট এবং মোশন কন্ট্রোলের জন্য সংযুক্ত করে।
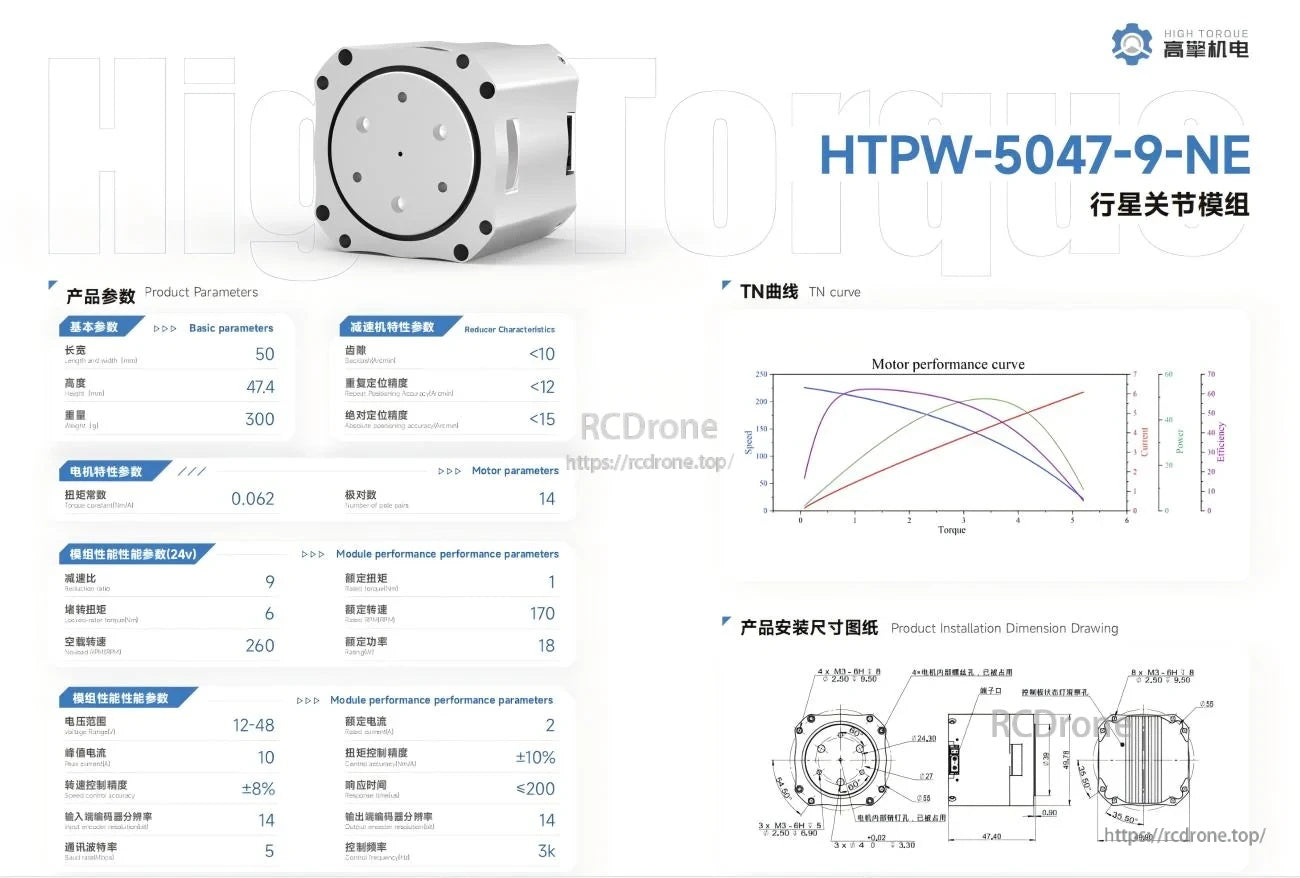
একই মডিউল ফুটপ্রিন্ট বজায় রেখে উচ্চ গতির অগ্রাধিকার দেওয়ার সময় 9:1 হ্রাস সংস্করণটি নির্বাচন করুন।
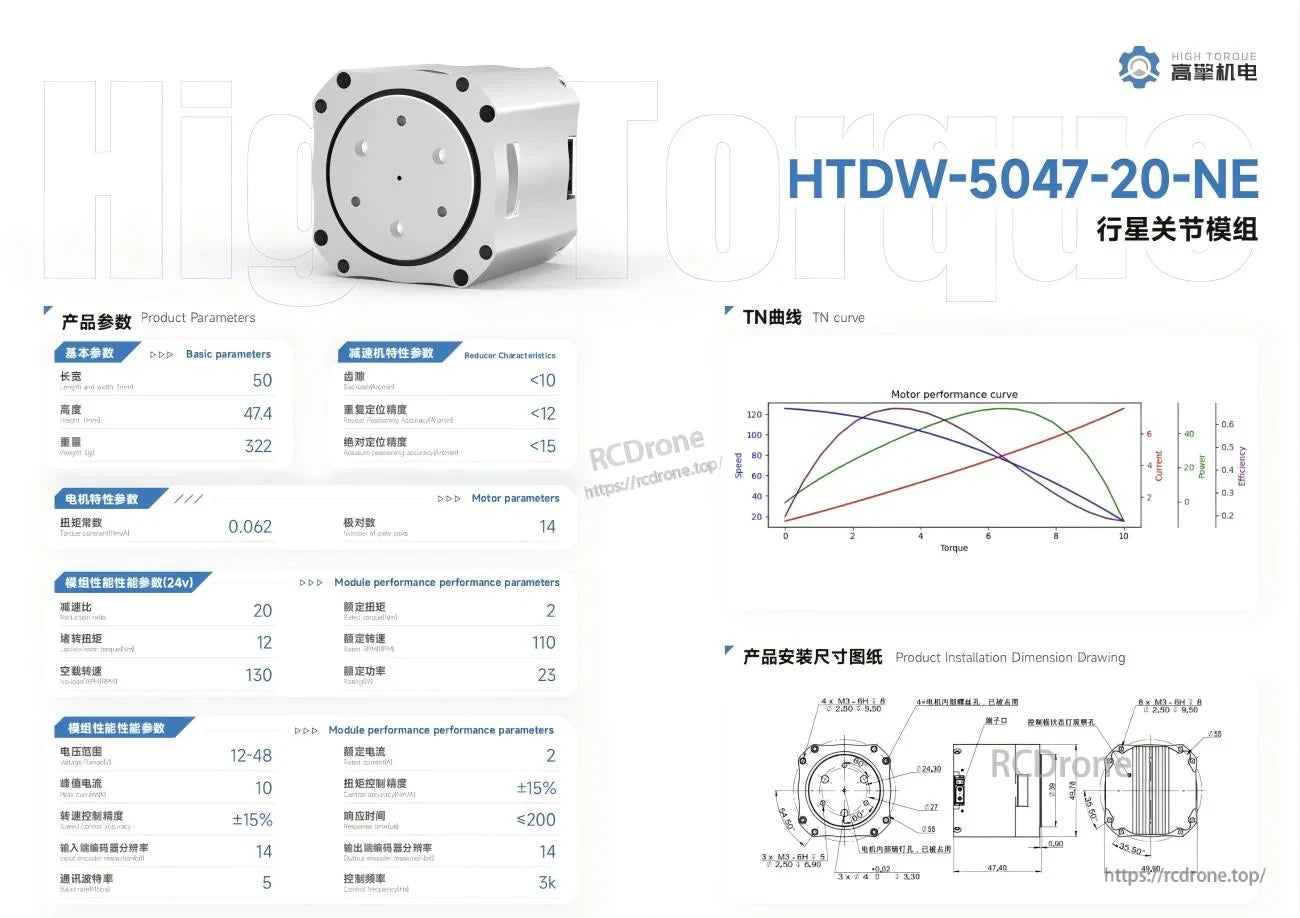
20:1 হ্রাস বিকল্পটি সাধারণ উদ্দেশ্যের রোবোটিক জয়েন্ট এবং অ্যাকচুয়েটরের জন্য গতি এবং টর্কের মধ্যে ভারসাম্য রক্ষা করে।
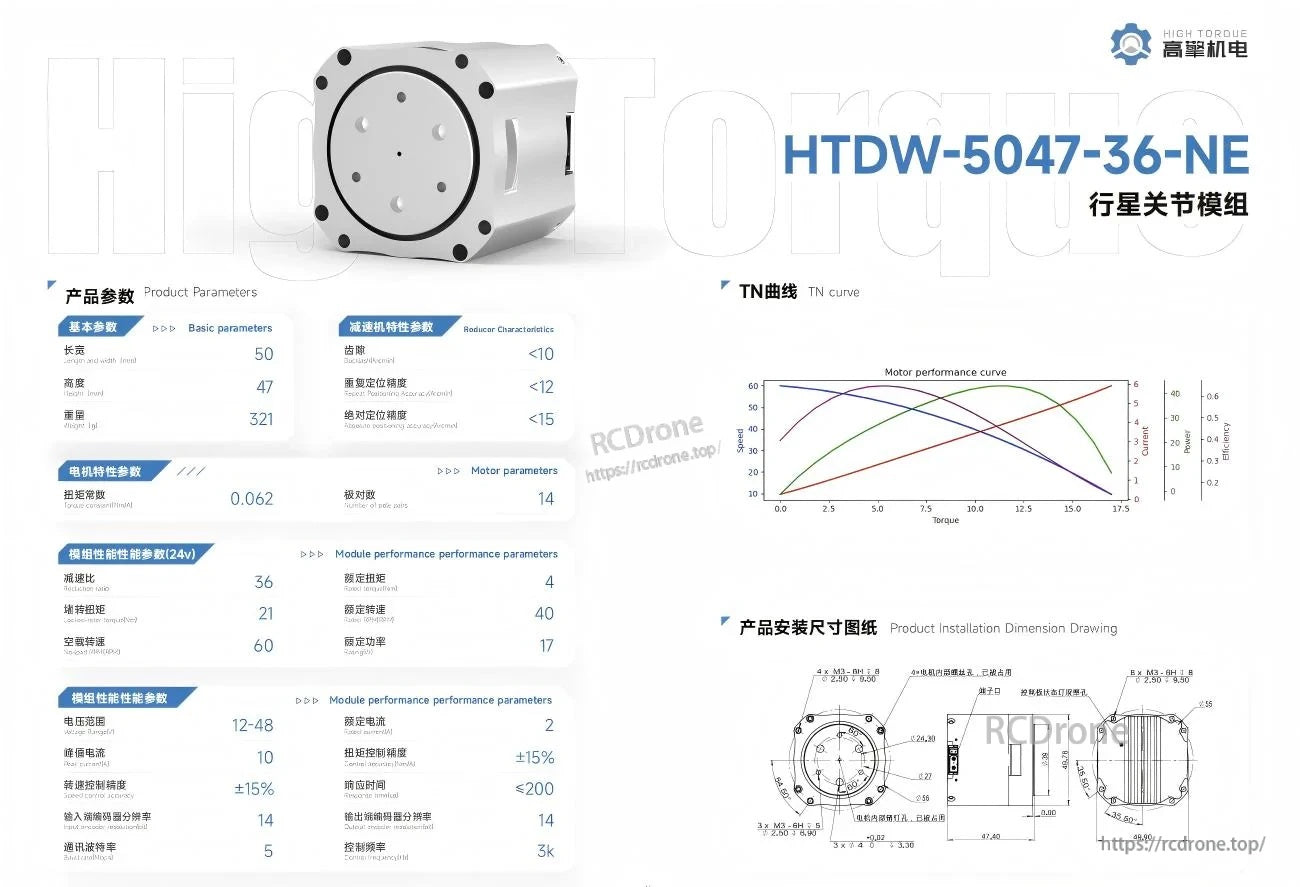
36:1 হ্রাস ভেরিয়েন্টটি নিম্ন গতির, উচ্চ টর্কের জয়েন্টগুলির জন্য উপযুক্ত যেখানে সঠিক অবস্থান নির্ধারণ অত্যন্ত গুরুত্বপূর্ণ।
Related Collections


