Holybro DroneCAN M8N GPS মডিউল - STM32G4 প্রসেসর BMM150 কম্পাস 3GNSS সমর্থন DroneCAN প্রোটোকল
Holybro DroneCAN M8N GPS মডিউল - STM32G4 প্রসেসর BMM150 কম্পাস 3GNSS সমর্থন DroneCAN প্রোটোকল
HolyBro
নিয়মিত দাম
$98.00 USD
নিয়মিত দাম
বিক্রয় মূল্য
$98.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
বর্ণনা
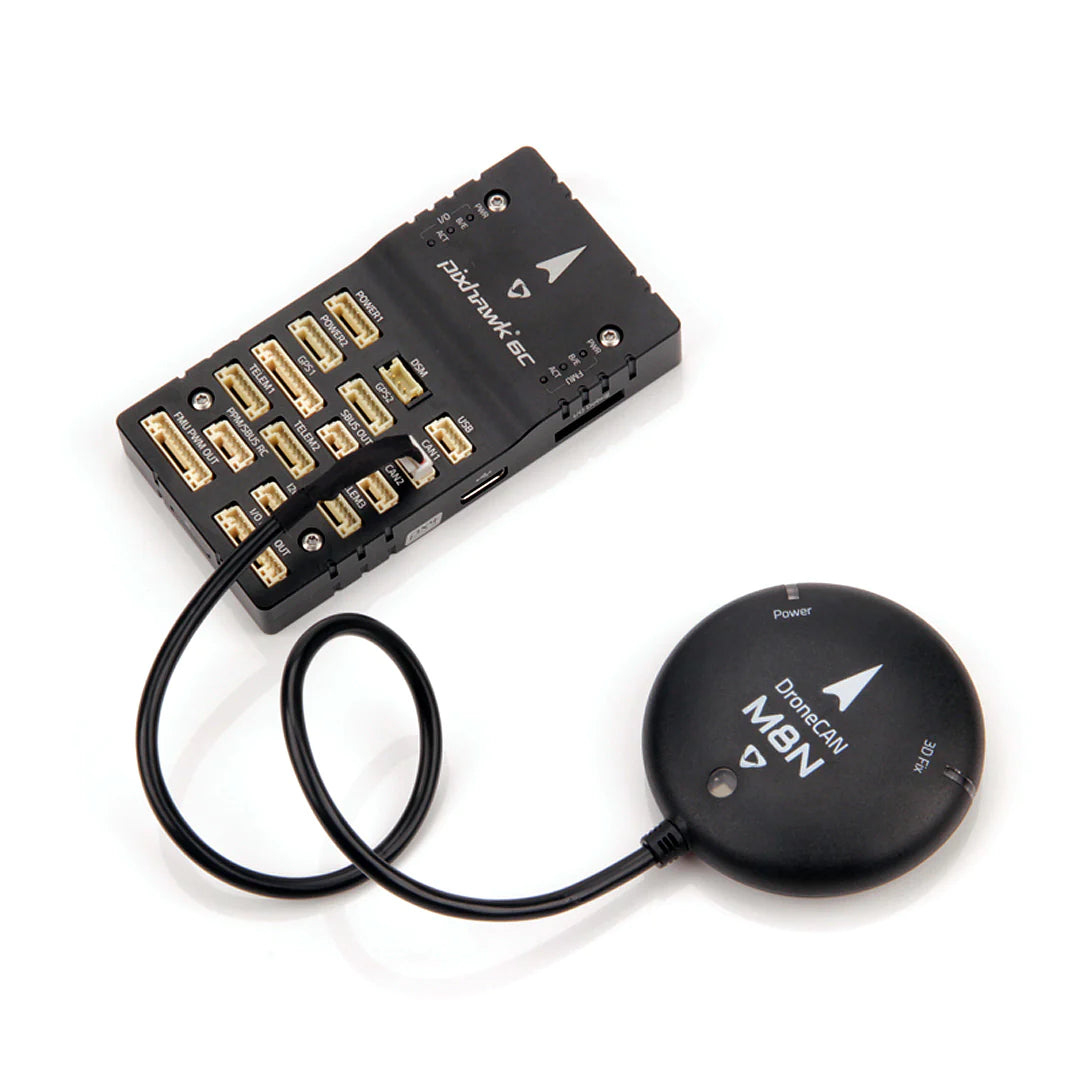
Holybro DroneCAN GPS-এ একটি UBLOX M8N বা M9N মডিউল, BMM150 কম্পাস, ত্রি-রঙের LED সূচক রয়েছে৷ এটিতে STM32G4 প্রসেসর রয়েছে এবং যোগাযোগের জন্য DroneCAN প্রোটোকল গ্রহণ করেছে, এটি সিরিয়াল সংযোগের তুলনায় ইলেক্ট্রোম্যাগনেটিক হস্তক্ষেপ মোকাবেলায় আরও নির্ভরযোগ্য এবং আরও ভাল করে তুলেছে। এটি ফ্লাইট কন্ট্রোলারের কোনো সিরিয়াল পোর্ট দখল করে না, এবং একটি CAN স্প্লিটার বোর্ডের মাধ্যমে একই CAN বাসের সাথে বিভিন্ন CAN ডিভাইস সংযুক্ত করা যেতে পারে৷
স্পেসিফিকেশন:
| DroneCAN M8N | |
| GNSS রিসিভার | Ublox NEO M8N |
| সমবর্তী GNSS সংখ্যা | 3 GNSS পর্যন্ত (GPS, Galileo, GLONASS, BeiDou) |
| প্রসেসর | STM32G4 (170MHz, 512K ফ্ল্যাশ) |
| কম্পাস | BMM150 |
| ফ্রিকোয়েন্সি ব্যান্ড | GPS: L1C/A GLONASS: L10F Beidou: B1I গ্যালিলিও: E1B/C |
| GNSS অগমেন্টেশন সিস্টেম | SBAS: WAAS, EGNOS, MSAS, QZSS |
| নেভিগেশন আপডেট | 5Hz ডিফল্ট(10Hz MAX) |
| নির্ভুলতা | 2.5m |
| গতির নির্ভুলতা | 0.05 m/s |
| সর্বোচ্চ # স্যাটেলাইট | 22+ |
| যোগাযোগ প্রোটোকল | DroneCAN @ 1 Mbit/s |
| অটোপাইলট FW সমর্থন করে | PX4, Ardupilot |
| পোর্টের ধরন | GHR-04V-S |
| অ্যান্টেনা | 25 x 25 x 4 মিমি সিরামিক প্যাচ অ্যান্টেনা |
| বিদ্যুৎ খরচ | 200mA এর কম @ 5V |
| ভোল্টেজ | 4.7-5.2V |
| অপারেটিং তাপমাত্রা | -40~80C |
| আকার | ব্যাস: 54 মিমি পুরুত্ব: 14.5 মিমি |
| ওজন | 36g |
| তারের দৈর্ঘ্য | 26cm |
| অন্যান্য নোট | - LNA MAX2659ELT+ RF অ্যামপ্লিফায়ার - রিচার্জেবল ফারাহ ক্যাপাসিট্যান্স - লো নয়েজ 3.3V রেগুলেটর |
অন্যান্য প্রযুক্তিগত তথ্যের জন্য, অনুগ্রহ করে https://docs.holybro.com/ এ যান
DroneCAN
DroneCAN হল প্রাথমিক CAN প্রোটোকল যা ArduPilot এবং PX4 প্রকল্পগুলি CAN পেরিফেরালগুলির সাথে যোগাযোগের জন্য ব্যবহার করে৷ এটি একটি ওপেন প্রোটোকল যার সাথে ওপেন কমিউনিকেশন, স্পেসিফিকেশন এবং একাধিক ওপেন ইমপ্লিমেন্টেশন।
DroneCAN ডেভেলপমেন্ট
DroneCAN প্রকল্পের একটি সক্রিয় উন্নয়ন সম্প্রদায় রয়েছে৷
- বিরোধ নিয়ে আলোচনা https://dronecan.org/discord
- গিথুবে বিকাশ https://github.com/DroneCAN
Related Collections