হলিব্রো পিক্সহক 4 অটোপাইলট ফ্লাইট কন্ট্রোলার
হলিব্রো পিক্সহক 4 অটোপাইলট ফ্লাইট কন্ট্রোলার
HolyBro
পিকআপের উপলভ্যতা লোড করা যায়নি
Pixhawk®4-এ STMicroelectronics®-এর উন্নত প্রসেসর প্রযুক্তি, Bosch®, InvenSense®-এর সেন্সর প্রযুক্তি এবং NuttX রিয়েল-টাইম অপারেটিং সিস্টেম রয়েছে, যে কোনো স্বায়ত্তশাসিত যান নিয়ন্ত্রণের জন্য অবিশ্বাস্য কর্মক্ষমতা, নমনীয়তা এবং নির্ভরযোগ্যতা প্রদান করে। .
Pixhawk 4 এর মাইক্রোকন্ট্রোলারে একটি 2MB ফ্ল্যাশ মেমরি এবং 512KB RAM রয়েছে। বর্ধিত শক্তি এবং RAM সংস্থানগুলির সাথে, বিকাশকারীরা তাদের উন্নয়ন কাজের সাথে আরও বেশি উত্পাদনশীল এবং দক্ষ হতে পারে। অটোপাইলটে আরো জটিল অ্যালগরিদম এবং মডেল প্রয়োগ করা যেতে পারে।
বোর্ডে উচ্চ-পারফরম্যান্স, কম-আওয়াজ আইএমইউ স্থিরকরণ অ্যাপ্লিকেশনের জন্য ডিজাইন করা হয়েছে। সমস্ত সেন্সর থেকে ডেটা-প্রস্তুত সংকেতগুলি অটোপাইলটে আলাদা ইন্টারাপ্ট এবং টাইমার ক্যাপচার পিনগুলিতে রুট করা হয়, সেন্সর ডেটার সুনির্দিষ্ট সময়-স্ট্যাম্পিংয়ের অনুমতি দেয়। নতুনভাবে ডিজাইন করা কম্পন বিচ্ছিন্নতা আরও সঠিক রিডিং সক্ষম করে, যা যানবাহনগুলিকে আরও ভাল সামগ্রিক ফ্লাইট পারফরম্যান্সে পৌঁছানোর অনুমতি দেয়।
দুটি বাহ্যিক এসপিআই বাস এবং ছয়টি সংশ্লিষ্ট চিপ নির্বাচনী লাইন অতিরিক্ত সেন্সর এবং এসপিআই-ইন্টারফেসড পেলোড যোগ করার অনুমতি দেয়। এখানে মোট চারটি I2C বাস রয়েছে, দুটি বাহ্যিক ব্যবহারের জন্য নিবেদিত এবং দুটি জিপিএস/কম্পাস মডিউলের জন্য সিরিয়াল পোর্ট সহ গ্রুপ করা হয়েছে।
দ্রষ্টব্য:
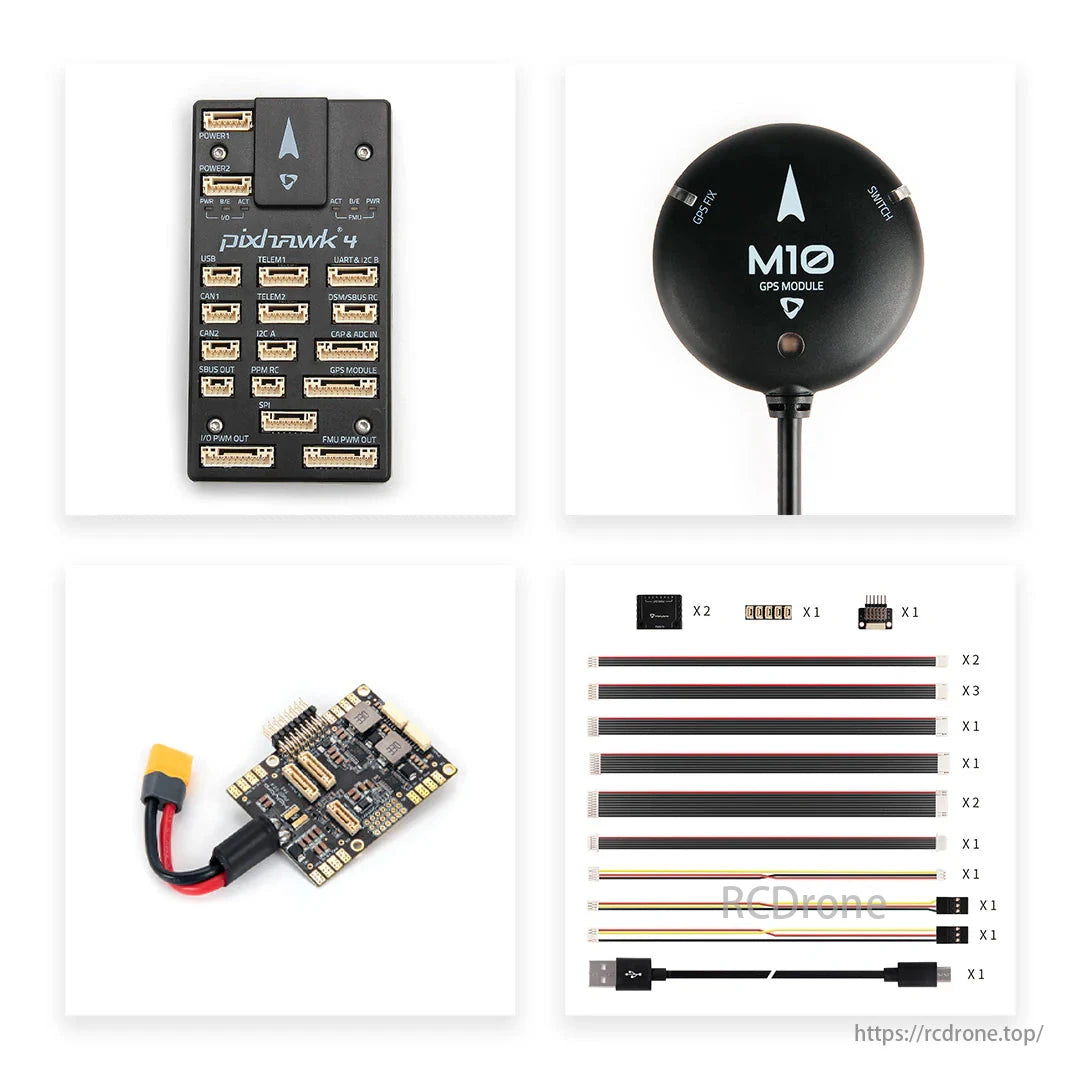
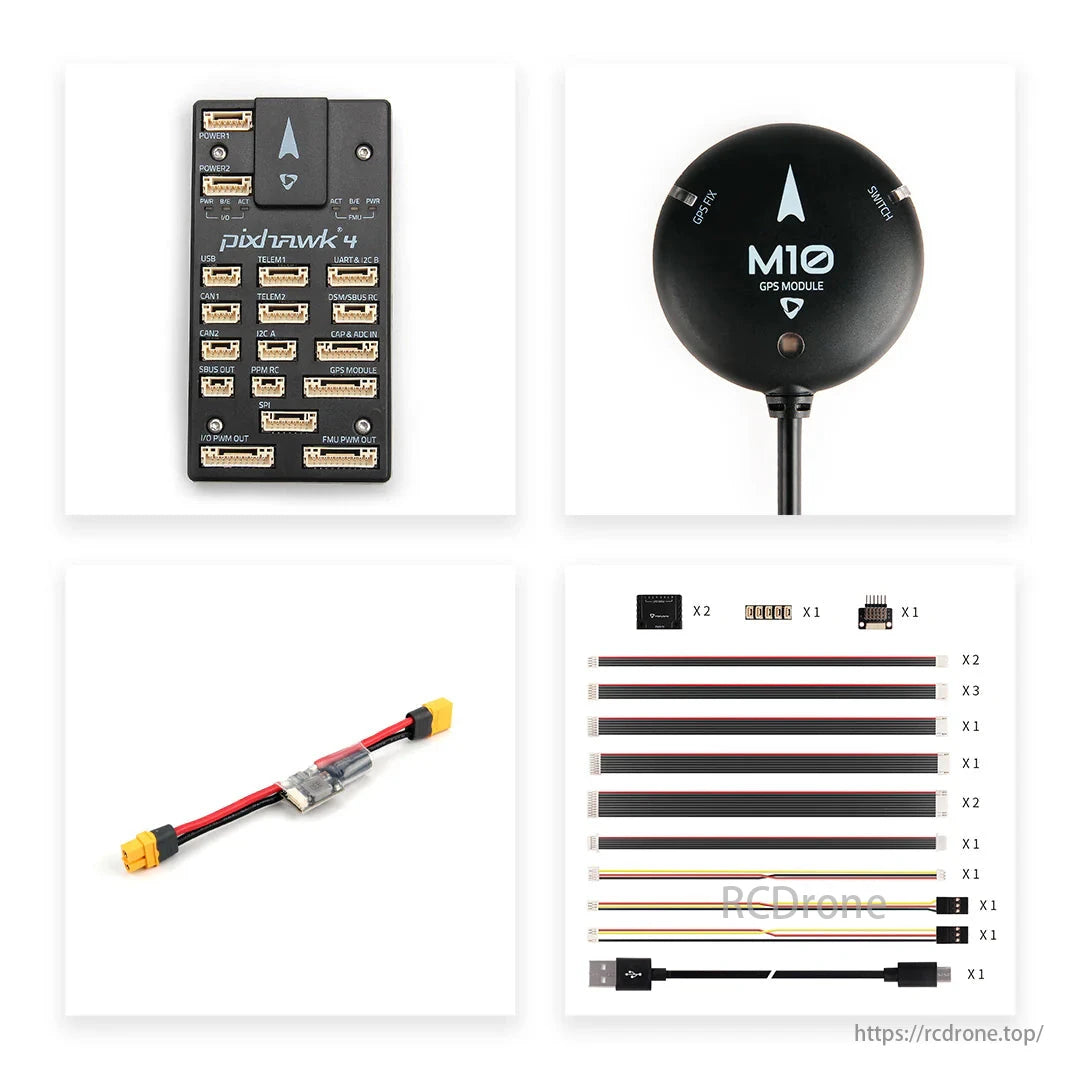
- M10 GPS প্রয়োজন PX4 1.14 এবং ArduPilot 4.3 বা নতুন।
- পাওয়ার মডিউল তুলনা চার্ট
প্রযুক্তিগত বিশেষ উল্লেখ
- প্রধান FMU প্রসেসর
- STM32F765 - 32 বিট আর্ম ® Cortex® -M7, 216MHz, 2MB মেমরি, 512KB RAM
- STM32F765 - 32 বিট আর্ম ® Cortex® -M7, 216MHz, 2MB মেমরি, 512KB RAM
- IO প্রসেসর
- STM32F103 - 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM (বর্তমান)
- STM32F100 - 32 বিট আর্ম ® Cortex® -M3, 24MHz, 8KB SRAM (বন্ধ)
- অন-বোর্ড সেন্সর
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055/ICM-20602
- ম্যাগ: IST8310
- ব্যারোমিটার: MS5611
- Accel/Gyro: ICM-20689
বৈদ্যুতিক তথ্য
- পাওয়ার মডিউল আউটপুট: 4.9~5.5V
- সর্বোচ্চ ইনপুট ভোল্টেজ: 6V
- সর্বাধিক বর্তমান সেন্সিং: 120A
- USB পাওয়ার ইনপুট: 4.75~5.25V
- সার্ভো রেল ইনপুট: 0~36V
- অপারেটিং তাপমাত্রা: -25-85° সে
যান্ত্রিক ডেটা
- মাত্রা: 44x84x12 মিমি
- ওজন (প্লাস্টিকের কেস): 33।3g
- ওজন (অ্যালুমিনিয়াম কেস): 49 গ্রাম
ডাউনলোড:
SKU 11032/11035 অন্তর্ভুক্ত:
- Pixhawk 4 ফ্লাইট কন্ট্রোলার (প্লাস্টিক বা অ্যালুমিনিয়াম)
- তারের সেট
SKU 20045/20046/20114/20115 অন্তর্ভুক্ত:
- Pixhawk 4 ফ্লাইট কন্ট্রোলার(প্লাস্টিক বা অ্যালুমিনিয়াম)
- পাওয়ার মডিউল: PM02 V3 12S/PM07 14S
- তারের সেট
SKU 20139/20140/20141/20142/20269/20270/20271/20272 অন্তর্ভুক্ত:
- Pixhawk 4 ফ্লাইট কন্ট্রোলার
- পাওয়ার মডিউল: PM02 V3 12S/PM07 14S
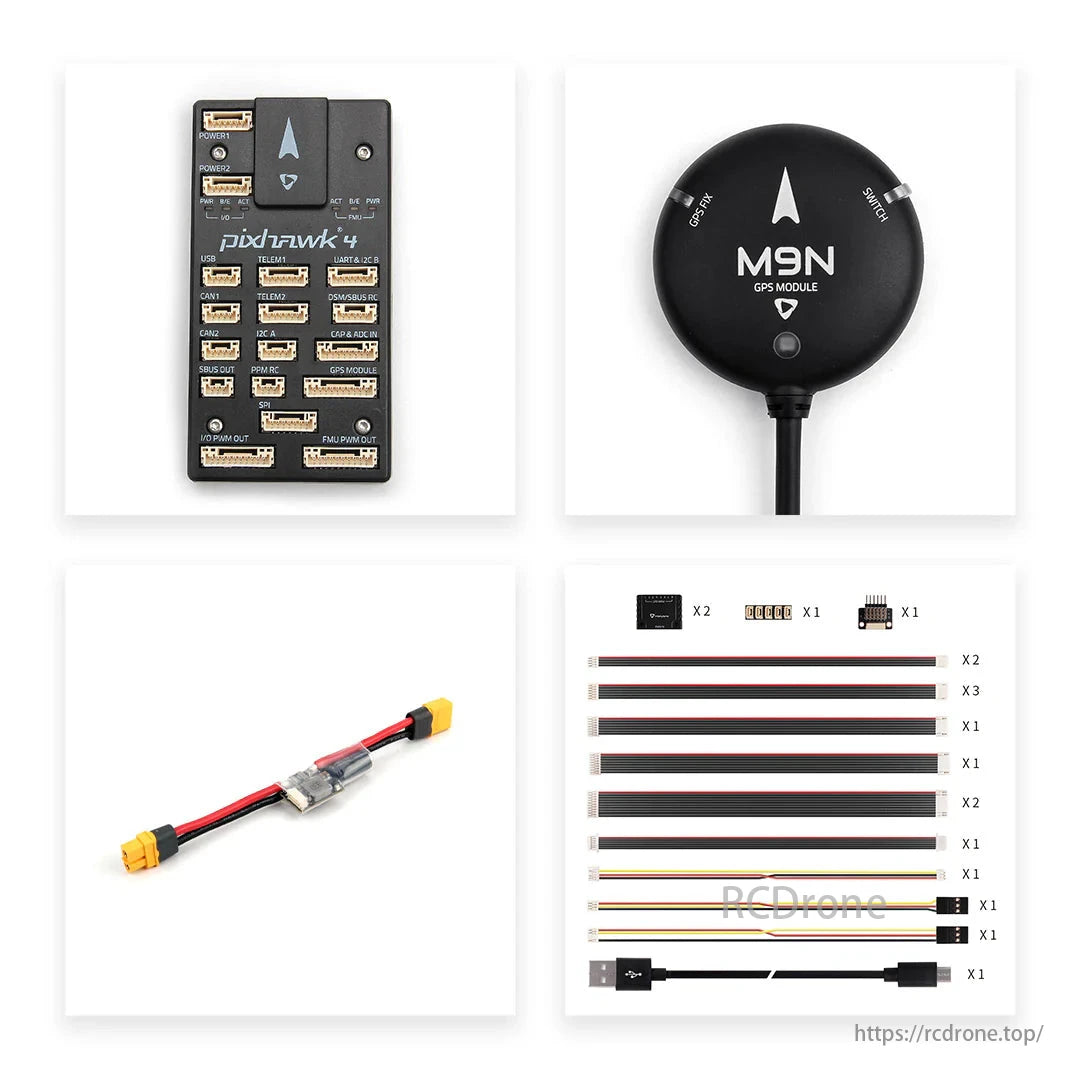
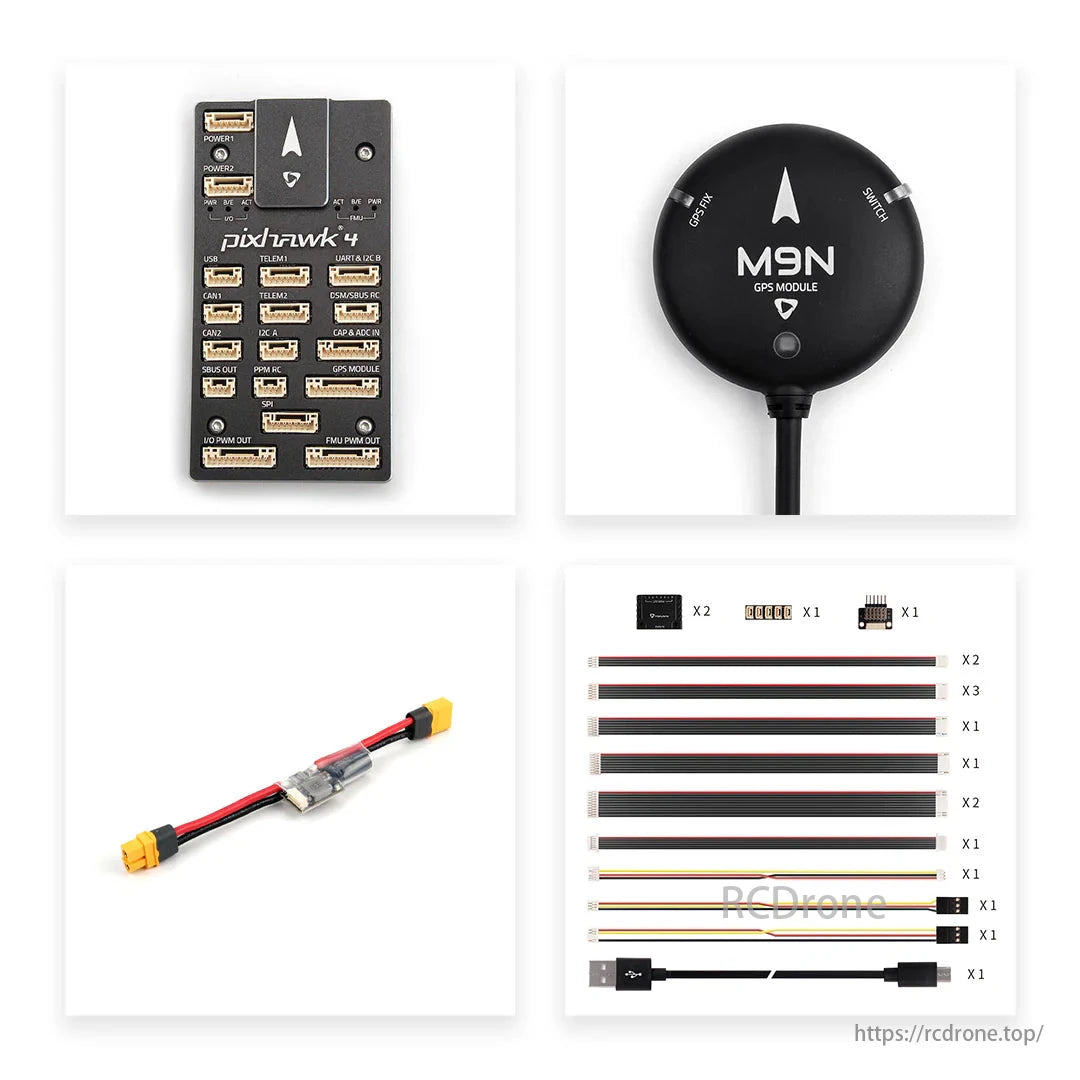
- জিপিএস: M9N/M10
- তারের সেট

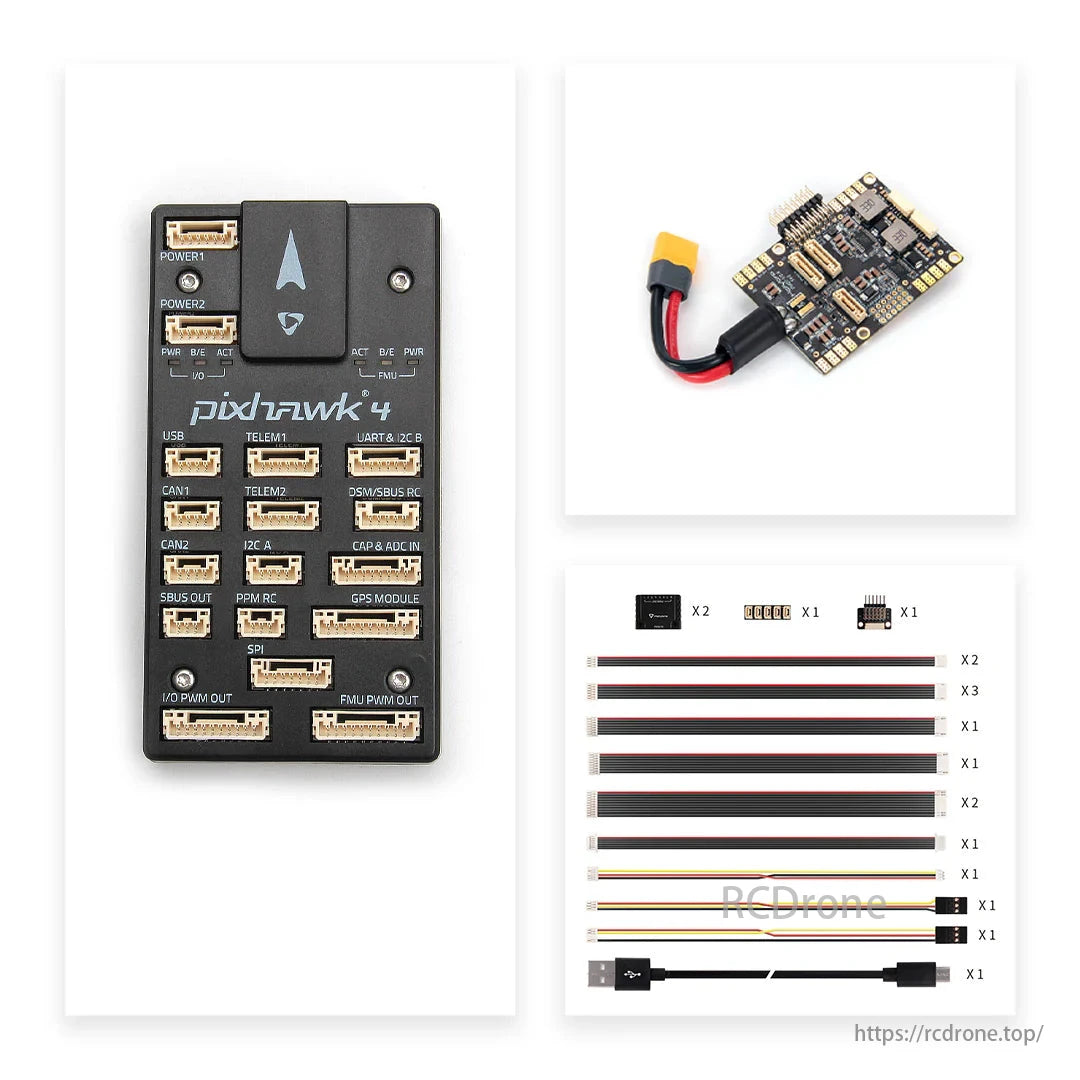
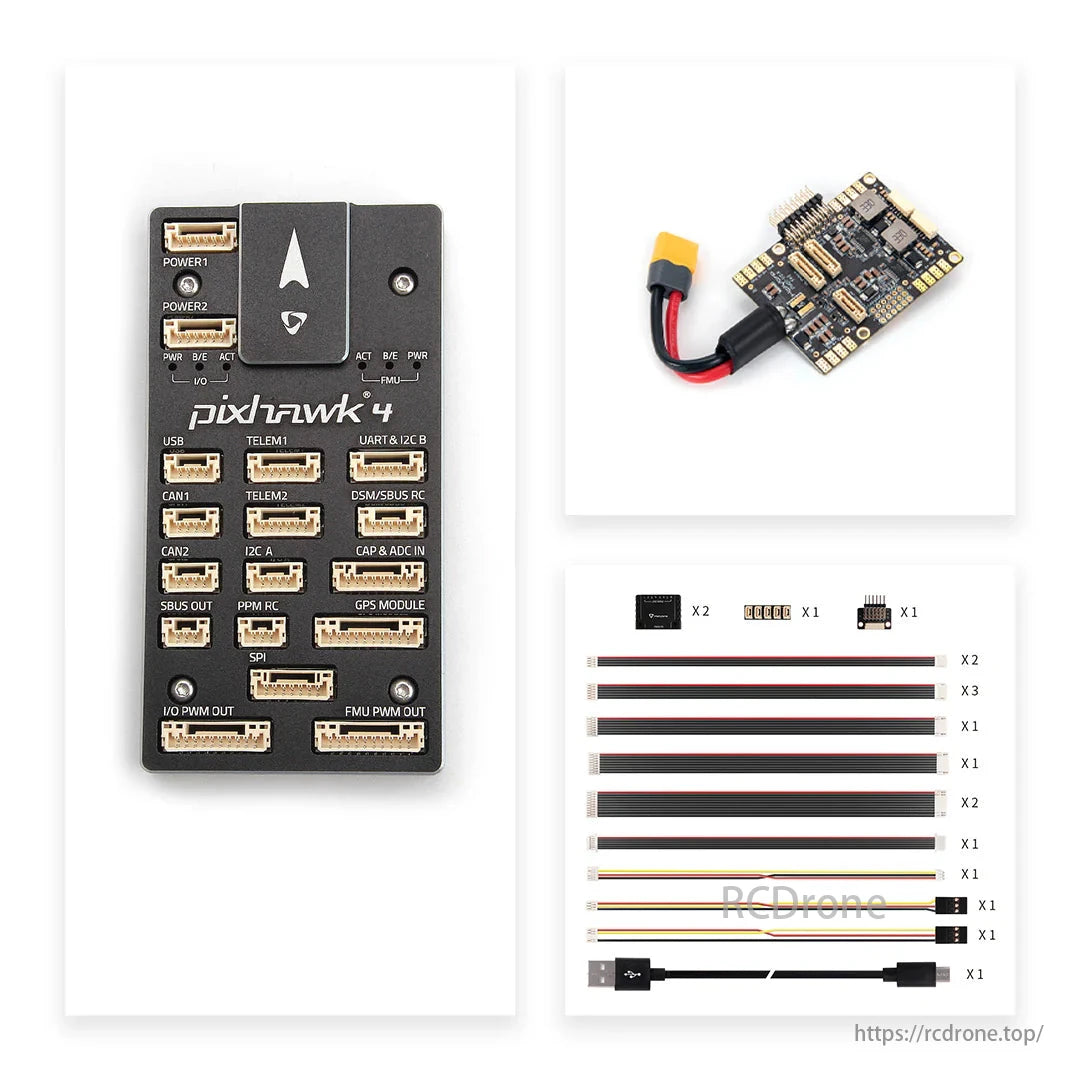
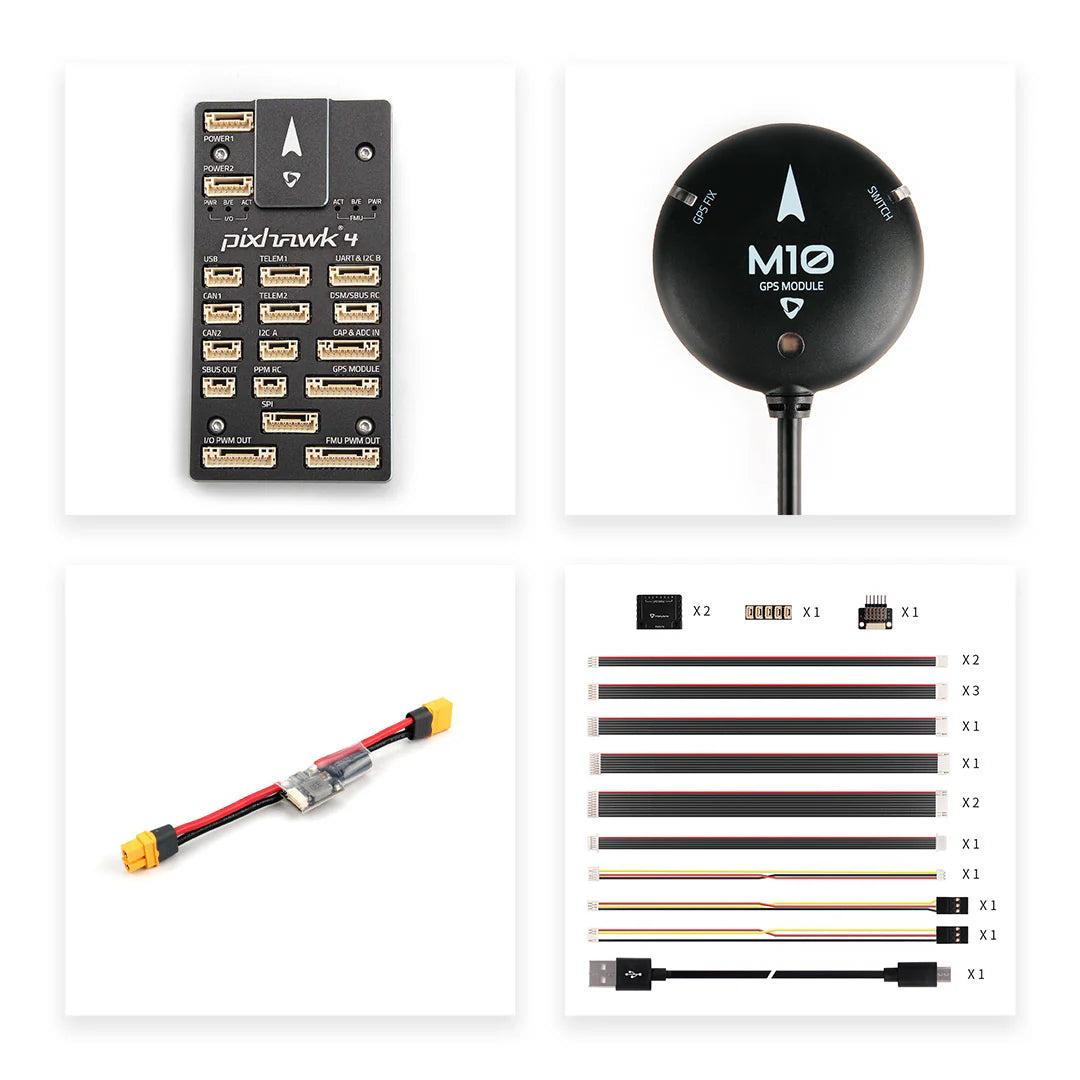
USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI, এবং GPS মডিউল সহ বিভিন্ন পোর্ট সহ Pixhawk 4 ফ্লাইট কন্ট্রোলার।

Pixhawk ফ্লাইট কন্ট্রোলার, PX4 অটোপাইলট সিস্টেম দ্বারা চালিত।

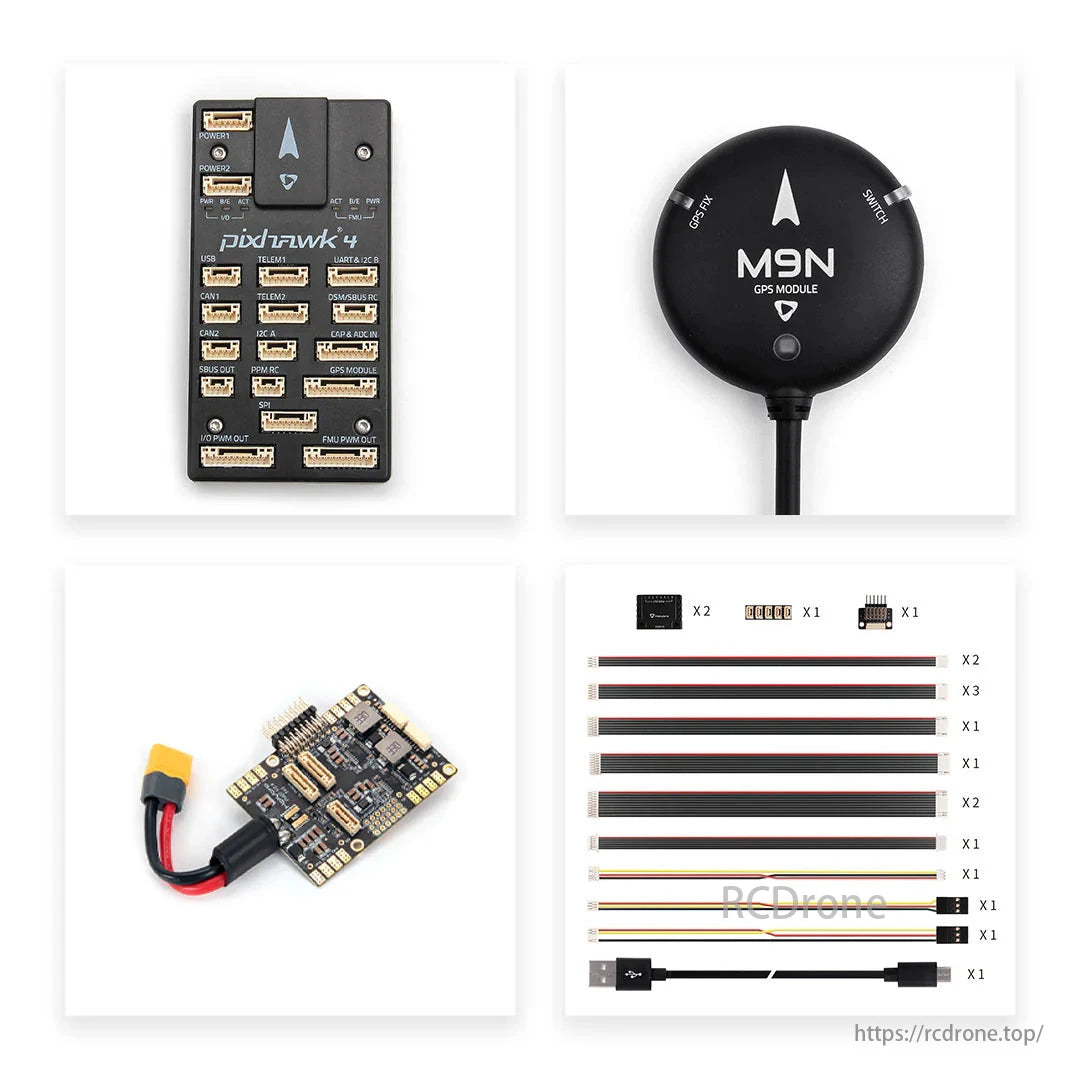
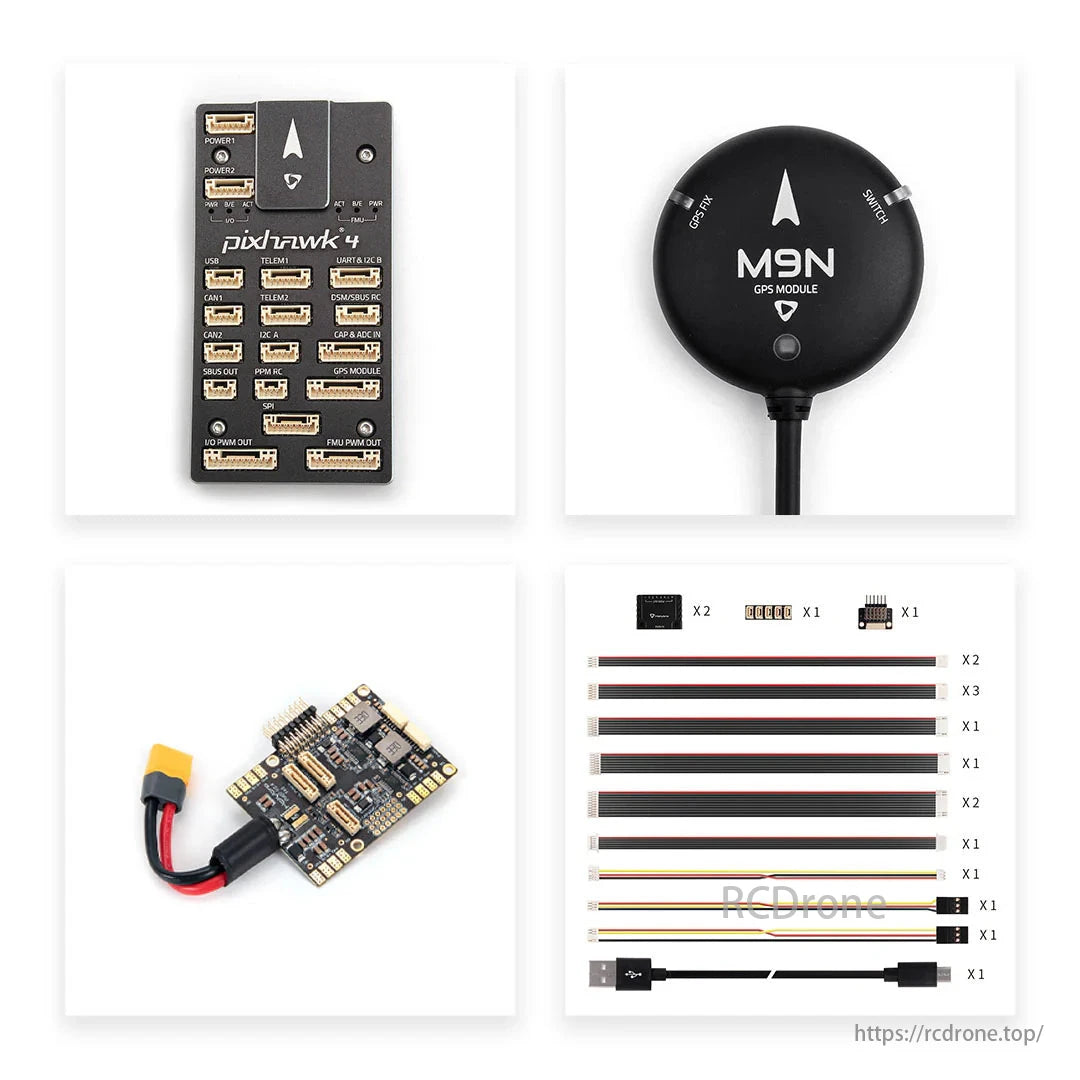
Pixhawk 4 ফ্লাইট কন্ট্রোলার, M9N GPS মডিউল, XT60 সংযোগকারী সহ পাওয়ার মডিউল এবং RC ড্রোন সমাবেশের জন্য বিভিন্ন তার।

ইউএসবি, ক্যান, এবং জিপিএস মডিউল সহ বিভিন্ন পোর্ট সহ Pixhawk 4 ফ্লাইট কন্ট্রোলার। সংযোগের জন্য একটি পাওয়ার মডিউল এবং একাধিক তারের অন্তর্ভুক্ত।

Pixhawk 4 ফ্লাইট কন্ট্রোলার, M9N GPS মডিউল, XT60 সংযোগকারী সহ পাওয়ার মডিউল এবং সংযোগের জন্য বিভিন্ন তারগুলি।