













লিঙ্কারবোট লিঙ্কার হ্যান্ড L10 রোবট হ্যান্ড, ১০ ডিওএফ, CAN/RS485 কন্ট্রোল, ওয়ার্ম গিয়ার ড্রাইভ, ৮০এন গ্রিপ, DC24V+/-10%
লিঙ্কারবোট লিঙ্কার হ্যান্ড L10 রোবট হ্যান্ড, ১০ ডিওএফ, CAN/RS485 কন্ট্রোল, ওয়ার্ম গিয়ার ড্রাইভ, ৮০এন গ্রিপ, DC24V+/-10%
LINKERBOT
পিকআপের উপলভ্যতা লোড করা যায়নি
সংক্ষিপ্ত বিবরণ
LINKERBOT Linker Hand L10 একটি রোবট হাত যা দক্ষ পরিচালনা এবং সঠিক নিয়ন্ত্রণের জন্য ডিজাইন করা হয়েছে। এটি 10 ডিগ্রি স্বাধীনতা বৈশিষ্ট্যযুক্ত যা একটি ওয়ার্ম গিয়ার ট্রান্সমিশন সহ এবং গবেষণা ও শিল্প ব্যবস্থায় নির্ভরযোগ্য সংহতির জন্য CAN/RS485 এর মাধ্যমে যোগাযোগ করে।
মূল বৈশিষ্ট্যসমূহ
- স্থিতিশীল কার্যকরীর জন্য ওয়ার্ম গিয়ার ট্রান্সমিশন সহ 10 DoF দক্ষ হাত।
- নিয়ন্ত্রণ ইন্টারফেস: CAN এবং RS485।
- পুনরাবৃত্তি অবস্থান নির্ভুলতা < +/-0.2mm; সাধারণ খোলার/বন্ধের সময় 1.2s।
- শক্তি ক্ষমতা: 15N সর্বাধিক আঙুলের টিপের শক্তি, 15N সর্বাধিক চার-আঙুলের টিপের শক্তি, 80N সর্বাধিক পাঁচ-আঙুলের গ্রাস করার শক্তি।
- পণ্য ম্যানুয়াল থেকে নিয়ন্ত্রণ মোড এবং ইউটিলিটি: অবস্থান নিয়ন্ত্রণ, গতি নিয়ন্ত্রণ, হ্যাপটিক ফিডব্যাক (শক্তি নিয়ন্ত্রণ) আঙুলের টিপ সেন্সরের মাধ্যমে, এবং অনলাইন ফার্মওয়্যার আপগ্রেড।
- ইকোসিস্টেম (প্রতি পণ্যের উপকরণ): সমর্থিত রোবোটিক আর্ম UR, Franka, XArm, RealMan, AgileX; সমর্থিত সিমুলেটর Pybullet, Isaac, MuJoCo; ব্যবহারের উদাহরণগুলির মধ্যে রয়েছে ROS1, ROS2, Python, C++; তথ্য অধিগ্রহণের পদ্ধতিগুলির মধ্যে রয়েছে টেলিওপারেশন গ্লাভস, এক্সোস্কেলেটন গ্লাভস, তরল ধাতু সেন্সিং গ্লাভস, ভিশন, এবং VR (Meta Quest 3)।
প্রি-সেলস বা ইন্টিগ্রেশন সমর্থনের জন্য, যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/।
স্পেসিফিকেশন
| স্বাধীনতার ডিগ্রি (DoF) | 10 |
| জয়েন্টের সংখ্যা | 20 (10 সক্রিয় + 10 নিষ্ক্রিয়) |
| সংক্রমণ মোড | ওয়ার্ম গিয়ার ট্রান্সমিশন |
| নিয়ন্ত্রণ ইন্টারফেস | CAN/RS485 |
| ওজন | 800g |
| সর্বাধিক লোড | 25kg |
| অপারেটিং ভোল্টেজ | DC24V+/-10% |
| স্ট্যাটিক কারেন্ট | 0.2A |
| গড় কারেন্ট (নো-লোড মুভমেন্ট) | 0.5A |
| সর্বাধিক কারেন্ট | 3A |
| পুনরাবৃত্তি অবস্থান নির্ভুলতা | < +/-0.2mm |
| খোলার/বন্ধ করার সময় | 1.2s |
| সর্বাধিক আঙুলের টিপের শক্তি | 15N |
| সর্বাধিক চার-আঙুলের টিপের শক্তি | 15N |
| সর্বাধিক পাঁচ-আঙুলের ধরার শক্তি | 80N |
প্রেসার সেন্সর
| পাইজোরেসিস্টিভ অ্যারে | 6*12 |
| সেন্সর ফোর্স-বেয়ারিং এলাকা | 9.6*14.4mm |
| ট্রিগার ফোর্স | 5g |
| মাপের পরিসর | 20N |
| সার্ভিস লাইফ | 100,000 সাইকেল |
| যোগাযোগ ফ্রেম রেট | 200FPS |
ক্যাপাসিটিভ সেন্সর (ঐচ্ছিক)
| নমুনা ফ্রিকোয়েন্সি | >=50Hz |
| মাপের পরিসর | 0-30N |
| ওভারলোড সীমা | 60N |
| প্রেসার সেন্সিটিভিটি | 0.1N |
| মাপের রেজলিউশন | 0.5%FS |
| মাপের সঠিকতা | 2%FS |
| প্রেসার রেজলিউশন | 0.25N |
| দিকনির্দেশনা সমাধান | 45° |
| সনাক্তকরণ দূরত্ব | 1cm (মেটাল, মানব দেহ) |
কি অন্তর্ভুক্ত আছে
- USB-to-CAN ডিবাগিং কেবল x1
- কনেক্টর কেবল XT30 (2+2) x1
- পাওয়ার অ্যাডাপ্টার x1
- পাওয়ার কেবল x1
- লিঙ্কার হ্যান্ড L10 x1
অ্যাপ্লিকেশনসমূহ
- ROS1/ROS2 এবং সিমুলেটর (Pybullet, Isaac, MuJoCo) ব্যবহার করে দক্ষ ম্যানিপুলেশন গবেষণা এবং শিক্ষা।
- গ্লাভস, এক্সোস্কেলেটন গ্লাভস, তরল ধাতু সেন্সিং গ্লাভস, ভিশন, এবং VR (মেটা কুয়েস্ট 3) এর মাধ্যমে টেলিওপারেশন।
- নির্ভুল সমাবেশ, পথ-ভিত্তিক অপারেশন, স্ক্রু টাইট করা, পাতলা শীট ধরার এবং সাধারণ বস্তুর পরিচালনা।
ম্যানুয়াল
Linker_Hand_L10_Product_Manual.pdf
বিস্তারিত

লিঙ্কার হ্যান্ড L10 10 DOF, লিঙ্কেজ মেকানিজম এবং কাস্টম মোটর ড্রাইভার দ্বারা সঠিক গতিশীলতা প্রদান করে। এটি UR, ফ্রাঙ্কা, ROS, পাইথন, VR, পাইবুলেট, CAN এবং আরও অনেক কিছু সমর্থন করে, যা বহুমুখী রোবোটিক ইন্টিগ্রেশন এবং নিয়ন্ত্রণের জন্য উপযুক্ত।
লিঙ্কার হ্যান্ড L10 উচ্চ দক্ষতা প্রদান করে, প্রতিটি আঙুল 4 ডিগ্রি স্বাধীনতা অফার করে সঠিক অপারেশনের জন্য। এর মাল্টি-সেন্সর সিস্টেম—ক্যামেরা এবং ই-স্কিন সহ—সম্পূর্ণ পরিবেশগত সচেতনতা এবং অভিযোজিত ইন্টারঅ্যাকশন প্রদান করে। এন্ড-ক্লাউড ইন্টিগ্রেশনের মাধ্যমে, ব্যবহারকারীরা কোড-মুক্ত স্কিল লাইব্রেরি ক্লাউড সার্ভিসের মাধ্যমে দ্রুত হাতটি মোতায়েন করতে পারেন, যা কার্যকর কাস্টমাইজেশন সক্ষম করে এবং অপারেশনাল জটিলতা কমায়। একসাথে, এই ক্ষমতাগুলি জটিল অ্যাপ্লিকেশনগুলির একটি বিস্তৃত পরিসরকে সমর্থন করে, সঠিকতা এবং ব্যবহারের সহজতা উভয়কেই উন্নত করে, ব্যাপক প্রোগ্রামিং বা সেটআপের প্রয়োজন ছাড়াই।

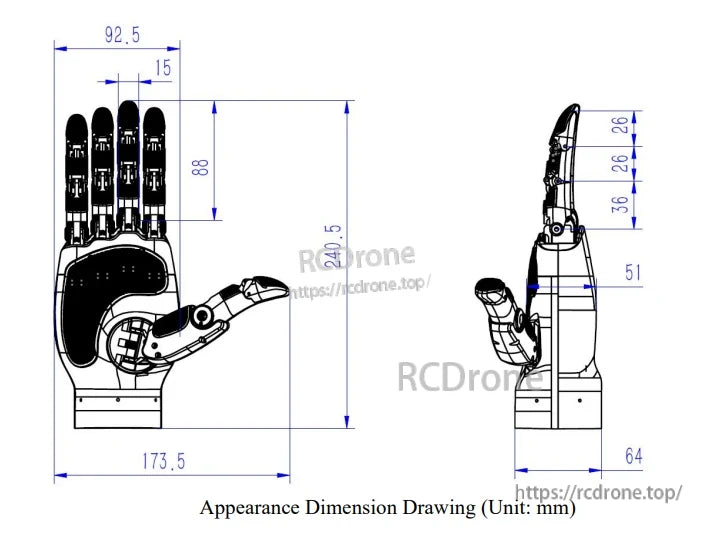
রোবট হাতের মাত্রা মিলিমিটারে, ডিজাইন এবং সমাবেশের জন্য সঠিক পরিমাপ সহ সামনের এবং পাশের দৃষ্টিভঙ্গি প্রদর্শন করছে।
লিঙ্কার হাত L10B সঠিক অবস্থান এবং গতি নিয়ন্ত্রণ, শক্তি ব্যবস্থাপনার জন্য হ্যাপটিক ফিডব্যাক এবং অনলাইন ফার্মওয়্যার আপগ্রেড অফার করে। শিল্প এবং গবেষণা অ্যাপ্লিকেশনগুলির জন্য সঠিকতা, নিরাপত্তা এবং অভিযোজনযোগ্যতার জন্য ডিজাইন করা হয়েছে যা সূক্ষ্ম ম্যানিপুলেশন এবং দীর্ঘমেয়াদী কর্মক্ষমতা প্রয়োজন।
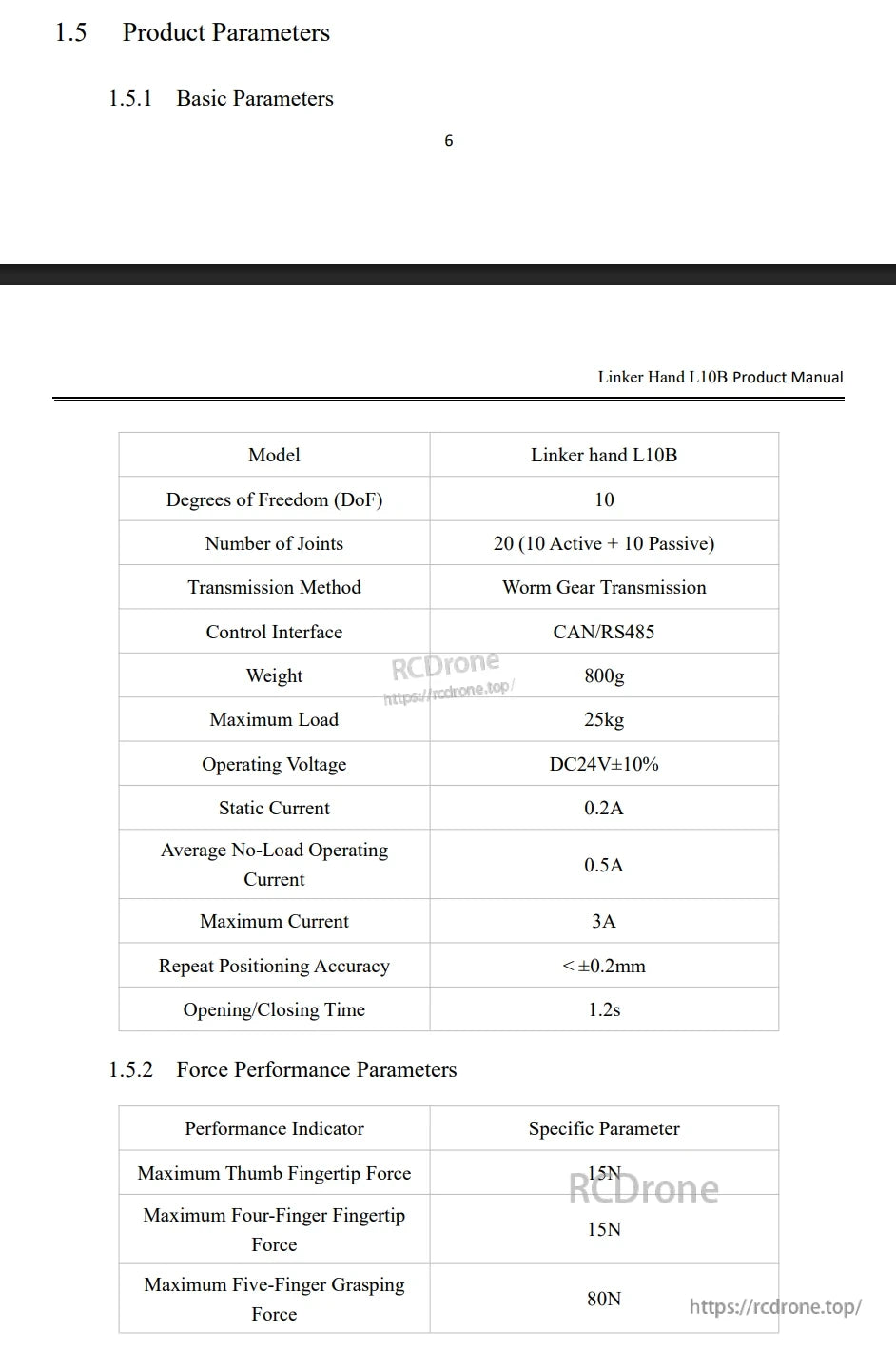
লিঙ্কার হাত L10B 10 DoF, 20 জয়েন্ট, ওয়ার্ম গিয়ার ট্রান্সমিশন এবং CAN/RS485 নিয়ন্ত্রণ অফার করে। 800g ওজনের, এটি DC24V এ 25kg পর্যন্ত পরিচালনা করে, 80N পর্যন্ত সঠিক অবস্থান এবং ধরার শক্তি প্রদান করে।

6x12 পিজোরেসিস্টিভ অ্যারে (20N পরিসীমা, 100k সাইকেল) বৈশিষ্ট্যযুক্ত। ঐচ্ছিক ক্যাপাসিটিভ সেন্সর: ≥50Hz স্যাম্পলিং, 0–30N পরিসীমা, 45° দিকের রেজোলিউশন, 1cm এ ধাতু বা মানবদেহ সনাক্ত করে।
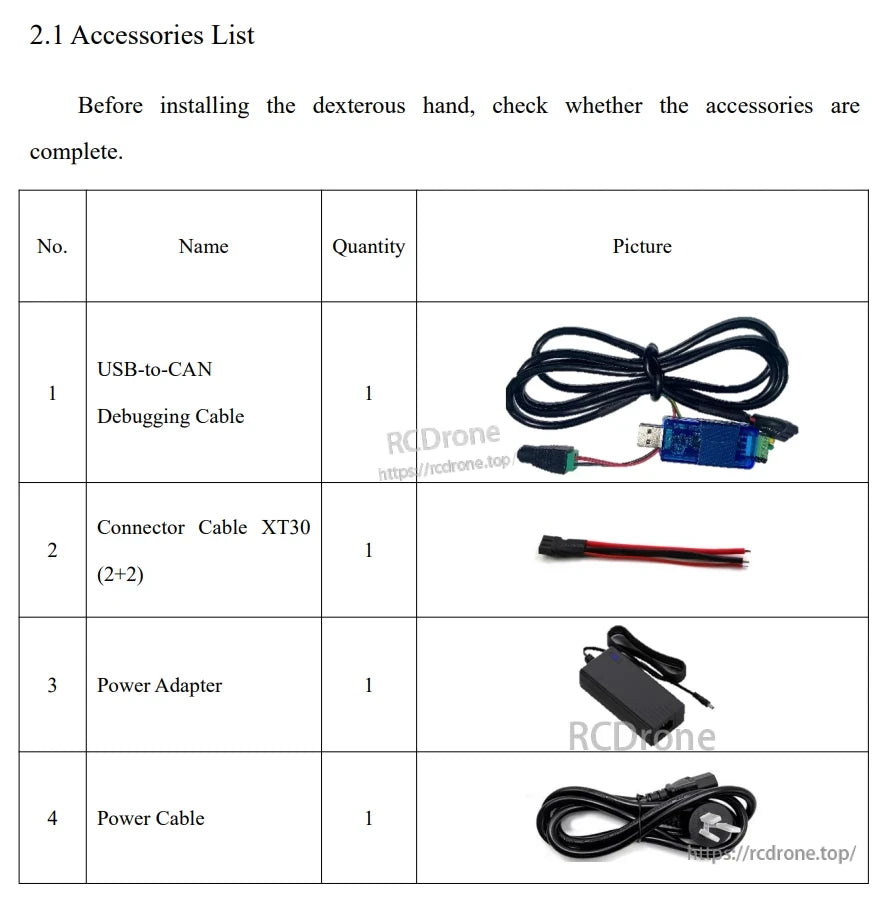
দক্ষ হাত ইনস্টলেশনের জন্য আনুষাঙ্গিক তালিকা: USB-to-CAN কেবল, XT30 সংযোগকারী, পাওয়ার অ্যাডাপ্টার, এবং পাওয়ার কেবল, প্রতিটি পরিমাণ এক।
Related Collections













