







LINKERBOT লিঙ্কার হ্যান্ড O6 রোবট হ্যান্ড, ৬ ডিওএফ, ১১টি জয়েন্ট, CAN/RS485, ১৩০N গ্রিপ, ±০.২মিমি নির্ভুলতা, DC24V±১০%
LINKERBOT লিঙ্কার হ্যান্ড O6 রোবট হ্যান্ড, ৬ ডিওএফ, ১১টি জয়েন্ট, CAN/RS485, ১৩০N গ্রিপ, ±০.২মিমি নির্ভুলতা, DC24V±১০%
LINKERBOT
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
LINKERBOT Linker Hand O6 একটি রোবট হাত যা সংক্ষিপ্ত সংহতির জন্য এবং সঠিক পরিচালনার জন্য ডিজাইন করা হয়েছে। এটি 6 DoF সহ 11 জয়েন্ট (6 সক্রিয় + 5 নিষ্ক্রিয়), স্থিতিশীল কার্যকরী জন্য ওয়ার্ম গিয়ার ট্রান্সমিশন, CAN/RS485 নিয়ন্ত্রণ এবং ঐচ্ছিক স্পর্শ সংবেদন প্রদান করে। দক্ষ কাঠামো DC24V±10% অপারেটিং ভোল্টেজে ±0.2mm পুনরাবৃত্তি অবস্থান নির্ভুলতার সাথে 130N পর্যন্ত পাঁচ-আঙুলের গ্রিপ শক্তি প্রদান করে। হালকা 370g নির্মাণ এবং ছোট ফুটপ্রিন্ট লজিস্টিক্স পরিচালনা, শিল্প সমাবেশ এবং অস্বাভাবিক আকৃতির গ্রাসিং পরিস্থিতিকে সমর্থন করে।
মূল বৈশিষ্ট্য
সংক্ষিপ্ত &এবং চটপটে
সংক্ষিপ্ত কাঠামোগত ডিজাইন সরঞ্জামের বোঝা কমায়, যখন সংকীর্ণ স্থানে সঠিক গ্রাসনের জন্য নমনীয়তা বাড়ায়।
উচ্চ স্থায়িত্ব
হালকা শক্তি এবং পরিধান প্রতিরোধের জন্য অ্যালুমিনিয়াম অ্যালোয় থেকে তৈরি, দীর্ঘমেয়াদী স্থিতিশীল কর্মক্ষমতা সমর্থন করে।
ডিভাইস-ক্লাউড ইন্টিগ্রেশন
ডিভাইস-ক্লাউড ইন্টিগ্রেশন একটি ক্লাউড-ভিত্তিক দক্ষতা লাইব্রেরির মাধ্যমে দ্রুত স্থাপন সক্ষম করে, সহজ অপারেশন এবং কাস্টমাইজেশনের সাথে।
স্পেসিফিকেশন
| মডেল | LINKERBOT লিঙ্কার হ্যান্ড O6 |
| স্বাধীনতার ডিগ্রি (DoF) | 6 |
| জয়েন্টের সংখ্যা | 11 (6 সক্রিয় + 5 নিষ্ক্রিয়) |
| সংক্রমণ মোড | ওয়ার্ম গিয়ার ট্রান্সমিশন |
| নিয়ন্ত্রণ ইন্টারফেস | CAN/RS485 |
| ওজন | 370g |
| সর্বাধিক লোড | 30kg |
| অপারেটিং ভোল্টেজ | DC24V±10% |
| পুনরাবৃত্তি অবস্থান নির্ভুলতা | ±0.2mm |
| ট্যাকটাইল সেন্সর | ঐচ্ছিক |
| সর্বাধিক আঙুলের টিপের শক্তি | 28N |
| চারটি আঙুলের টিপের সর্বাধিক শক্তি | 33N |
| পাঁচটি আঙুলের সর্বাধিক গ্রিপ শক্তি | 130N |
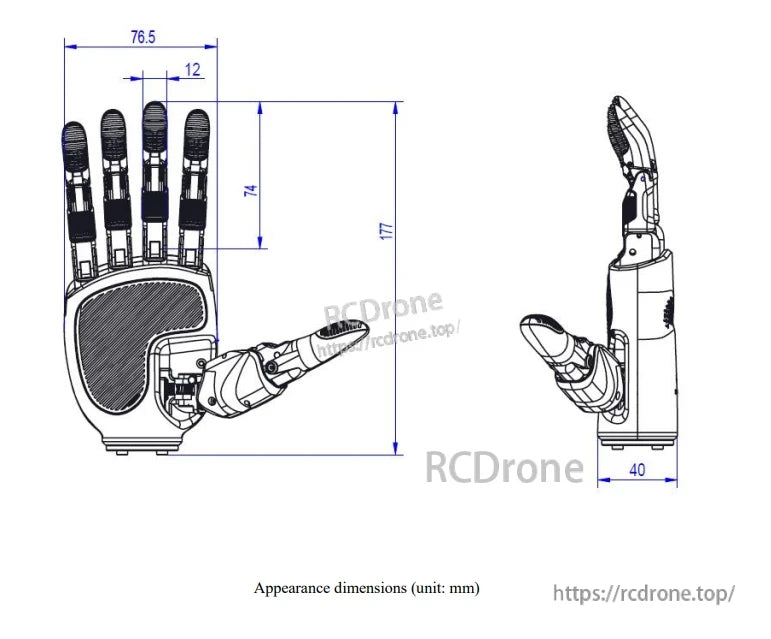
| আকার (দৃশ্য) | উচ্চতা 177mm; প্রস্থ 76.5mm; পুরুত্ব 40mm |
গতি পরিসর
| LF2, RF2, MF2, FF2 (বাঁকানো) | 90° |
| LF1, RF1, MF1, FF1 (বাঁকানো) | 80° |
| THUMB1 (বাঁকানো) | 55° |
| THUMB2 (বাঁকানো) | 30° |
| THUMB3 (পাশ - দুলানো) | 88° |
কি অন্তর্ভুক্ত
- USB-to-CAN ডিবাগিং কেবল ×1
- কনেক্টর কেবল XT30 (2+2) ×1
- পাওয়ার অ্যাডাপ্টার ×1
- পাওয়ার কেবল ×1
- লিঙ্কার হ্যান্ড O6 x1
বিক্রয় বা প্রযুক্তিগত সহায়তার জন্য, যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
অ্যাপ্লিকেশন
- লজিস্টিক্স পরিচালনা এবং উপকরণ স্থানান্তর
- শিল্প সমাবেশ এবং সরঞ্জাম পরিচালনা
- অস্বাভাবিক আকার এবং ভোক্তা পণ্যের স্থিতিশীল গ্রাস
ম্যানুয়াল
Linker_Hand_O6_Product_Manual.pdf
বিস্তারিত

লিঙ্কার হ্যান্ড O6 সঠিক, শক্তিশালী গ্রিপের জন্য 6টি সক্রিয় এবং 5টি নিষ্ক্রিয় জয়েন্ট অফার করে। কমপ্যাক্ট, টেকসই অ্যালুমিনিয়াম ডিজাইন লজিস্টিক্স, সমাবেশ এবং অস্বাভাবিক গ্রাসের জন্য উপযুক্ত। কোডিং ছাড়াই সহজ AI প্রশিক্ষণের জন্য ক্লাউড ইন্টিগ্রেশন বৈশিষ্ট্যযুক্ত।


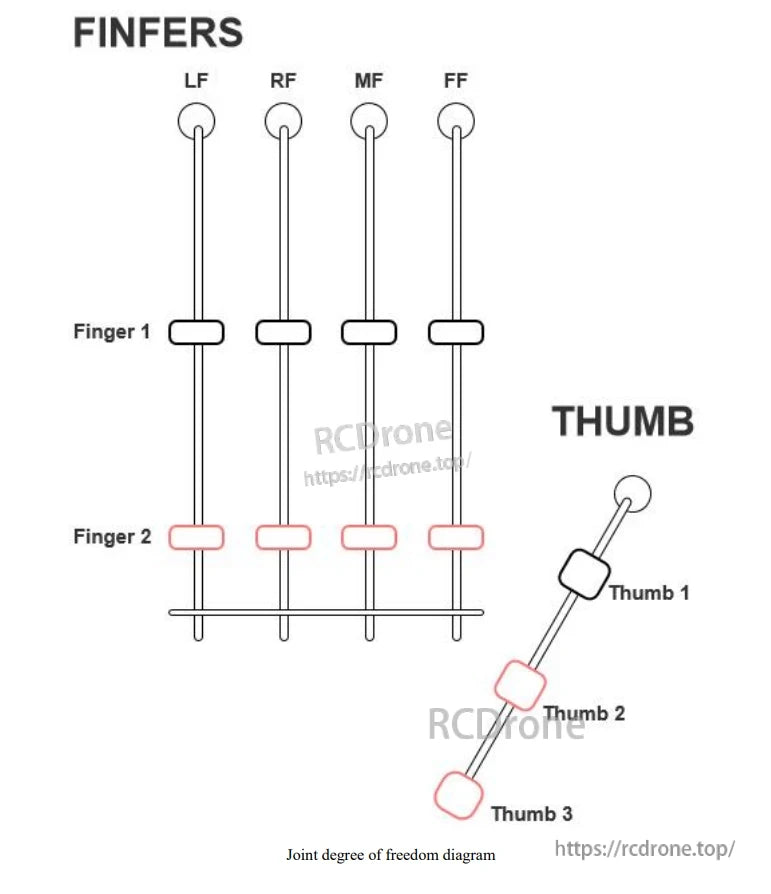
আঙ্গুল এবং আঙুলের জয়েন্টের স্বাধীনতার ডিগ্রি ডায়াগ্রাম
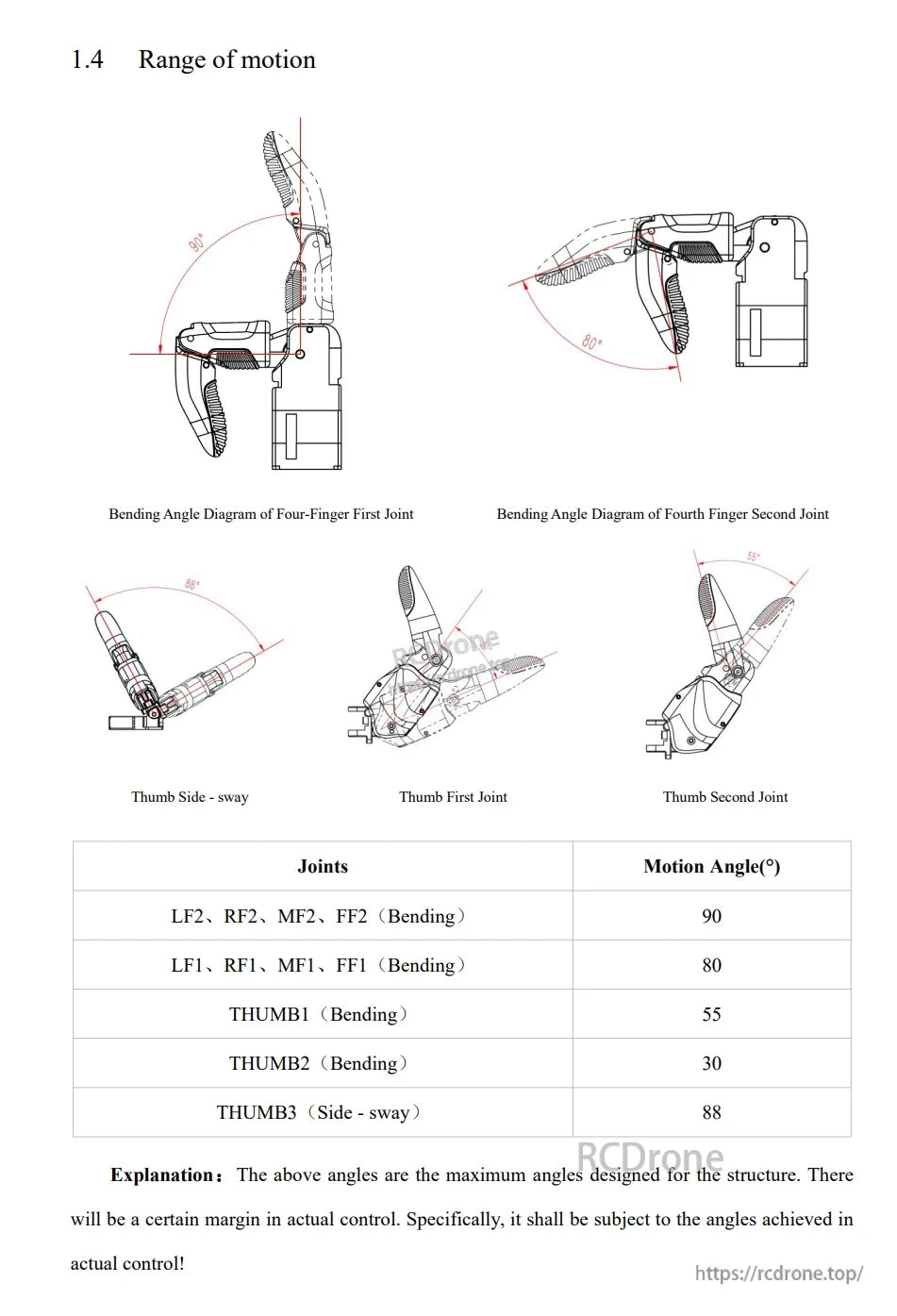
আঙ্গুল 80–90° বাঁকানো হয়, আঙুল 30–55° বাঁকানো হয়, এবং পাশের দোল 88° পৌঁছায়। এগুলি ডিজাইন করা সর্বাধিক কোণ; প্রকৃত নিয়ন্ত্রণ কিছুটা পরিবর্তিত হতে পারে।
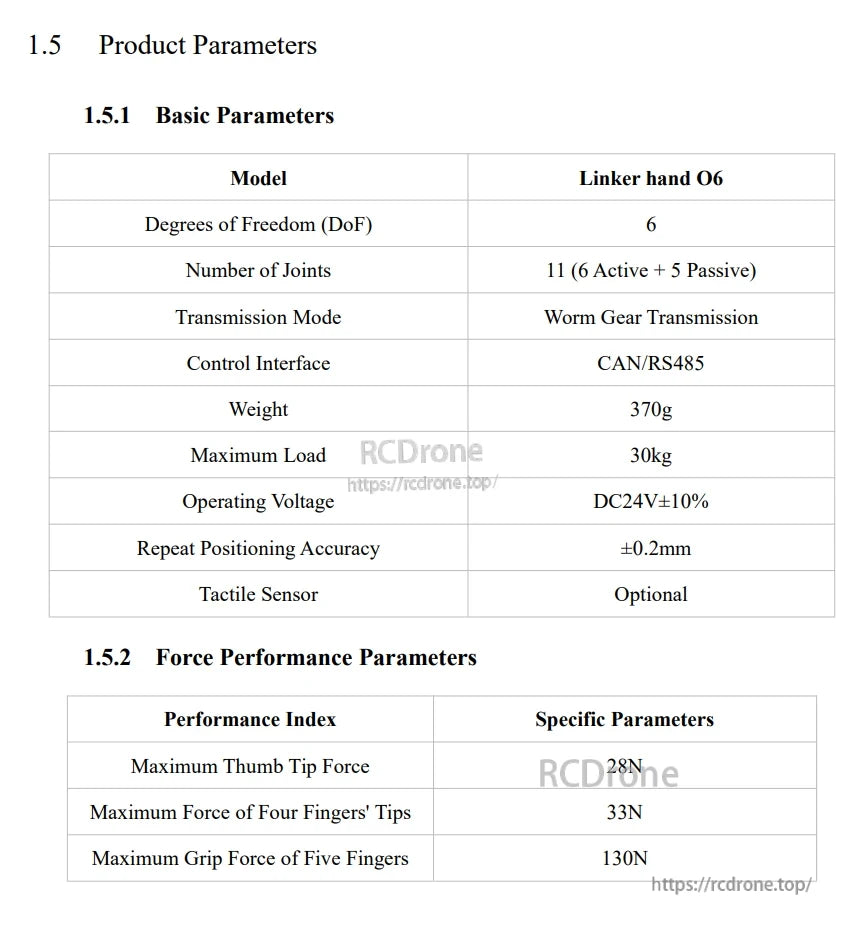
লিঙ্কার হ্যান্ড O6 রোবট হাতের 6 DoF, 11 জয়েন্ট, ওয়ার্ম গিয়ার ট্রান্সমিশন, CAN/RS485 নিয়ন্ত্রণ, ওজন 370g, সর্বাধিক 30kg লোড পরিচালনা করে, DC24V±10% এ কাজ করে, ±0.2mm সঠিকতা রয়েছে, এবং নির্দিষ্ট শক্তি কর্মক্ষমতার সাথে ঐচ্ছিক ট্যাকটাইল সেন্সর অফার করে।

দক্ষ হাত ইনস্টলেশনের জন্য আনুষাঙ্গিক তালিকা: USB-to-CAN কেবল, XT30 সংযোগকারী, পাওয়ার অ্যাডাপ্টার, এবং পাওয়ার কেবল—সবগুলোর পরিমাণ এক।
Related Collections







