



LKMTECH MF4005-V2 মোটর ১২ভি RS485/CAN ১৮-বিট ম্যাগনেটিক এনকোডার DF40V2 ড্রাইভ অপশন রোবোটিক্সের জন্য
LKMTECH MF4005-V2 মোটর ১২ভি RS485/CAN ১৮-বিট ম্যাগনেটিক এনকোডার DF40V2 ড্রাইভ অপশন রোবোটিক্সের জন্য
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
পর্যালোচনা
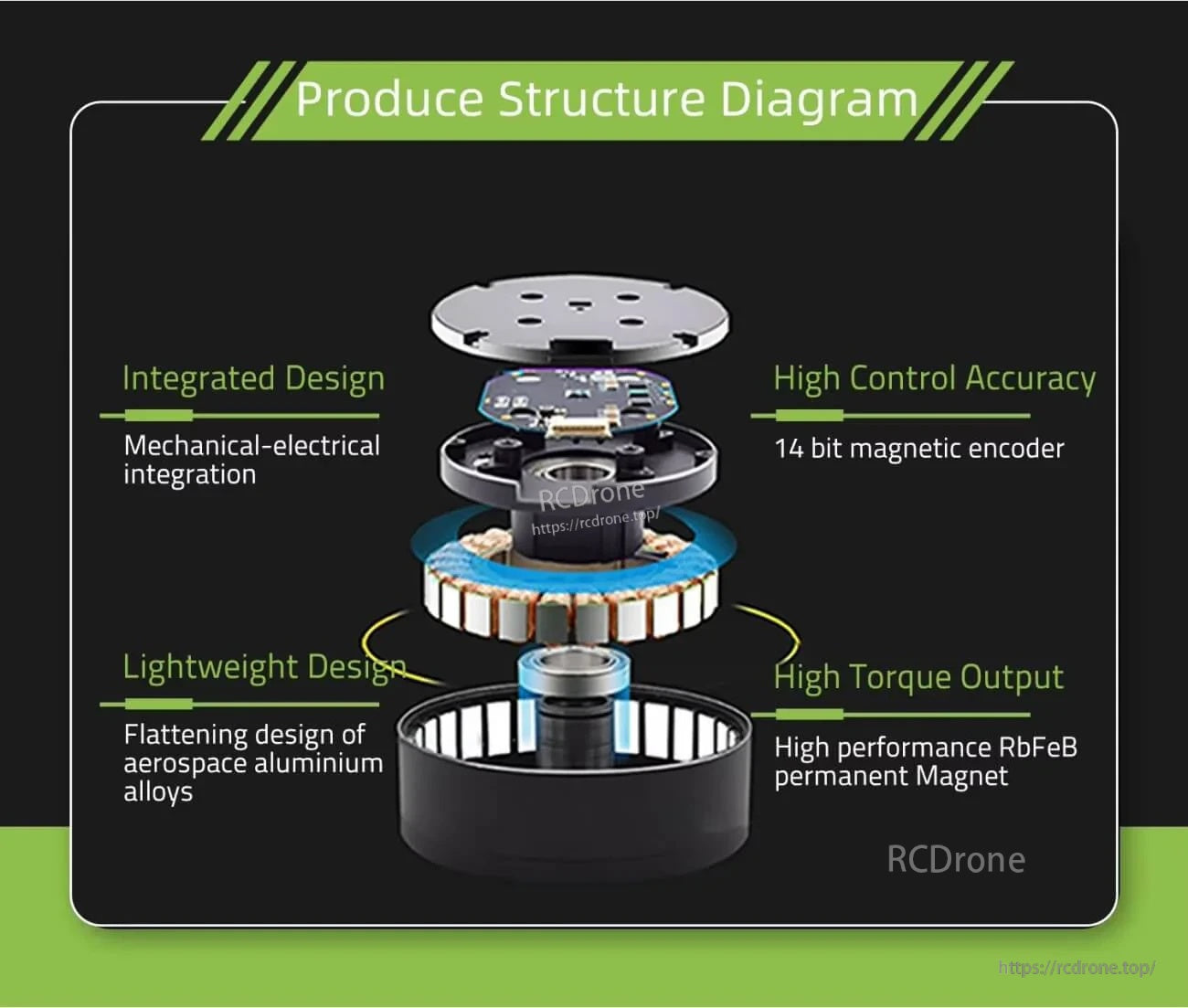
LKMTECH MF4005-V2 একটি মোটর যা সংহত মেকাট্রনিক অ্যাপ্লিকেশনগুলির জন্য ডিজাইন করা হয়েছে যা হালকা ডিজাইন, উচ্চ নিয়ন্ত্রণ সঠিকতা এবং উচ্চ টর্ক আউটপুট প্রয়োজন। MF4005 V2 আপডেটের বৈশিষ্ট্যগুলি হল: এনকোডার রেজোলিউশন 14-বিট থেকে 18-বিটে উন্নীত করা হয়েছে, কগিং টর্ক অপ্টিমাইজেশন, PWM ইনপুট সমর্থন, এবং একাধিক বড-রেট বিকল্প সহ CAN/RS485 যোগাযোগ।
মূল বৈশিষ্ট্য
- একীভূত ডিজাইন: যান্ত্রিক-ইলেকট্রিক একীকরণ
- হালকা ডিজাইন: মহাকাশ অ্যালুমিনিয়াম খাদগুলোর সমতল ডিজাইন
- উচ্চ নিয়ন্ত্রণ সঠিকতা: চৌম্বক এনকোডার (MF4005 V2 আপডেট 14-বিট থেকে 18-বিটে উন্নীত)
- উচ্চ টর্ক আউটপুট: উচ্চ কার্যকারিতা RbFeB স্থায়ী চুম্বক
- PWM ইনপুট সমর্থন করে
- যোগাযোগ: CAN বা RS485
- ড্রাইভ ফাংশন: টর্ক মোড, গতি মোড এবং অবস্থান মোডের মধ্যে পরিবর্তন করতে পারে
- মেইন কন্ট্রোল: 32-বিট Cortex-M4 ARM উচ্চ-কার্যকারিতা প্রসেসর (ড্রাইভ)
- স্টেটর তাপমাত্রার বাস্তব সময় পর্যবেক্ষণ (ড্রাইভ)
- ড্রাইভ পাওয়ার স্টেজ: নিম্ন অভ্যন্তরীণ প্রতিরোধ এবং উচ্চ বর্তমান সহ পূর্ণ ব্রিজ সার্কিট
- 18-বিট একক টার্ন আবসোলিউট মান চুম্বক এনকোডার (ড্রাইভ বৈশিষ্ট্য টেক্সট); এক ক্যালিব্রেশন, শূন্য অবস্থান কখনও হারায় না
- মোটর নির্মাণ নোট: বাইরের রোটর; স্থায়ী চুম্বক বহু-পর্যায়ের আর্ক ডিজাইন; ছোট বায়ু ফাঁক; রেডিয়াল চুম্বকায়ন; 0.২ মিমি সিলিকন স্টিল শীট; ক্লাস এইচ ইনসুলেটেড এনামেলড ওয়্যার; SH গ্রেড NdFeB
- OEM/ODM সেবা (পণ্য স্পেসিফিকেশন নয়)
- প্যারামিটার সফটওয়্যার: প্যারামিটার সমন্বয়, পরীক্ষা এবং আপগ্রেড করার জন্য প্রোগ্রাম সফটওয়্যার প্রদান করা হয়; PC, MCU, PLC, ICP এবং RPi এর মতো ওপেন সোর্স উন্নয়ন সমর্থন করে
অ্যাপ্লিকেশন দৃশ্যপট
- মানবাকৃতির রোবট
- রোবটিক আর্ম
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- AGV যানবাহন
- ARU রোবট
- ক্যামেরা PTZ
- লেজার লিডার
- পাওয়ার স্টেশন পরিদর্শন রোবট
- শিল্প পরিদর্শন
স্পেসিফিকেশন
মোটর মডেল: MF4005-V2
| প্যারামিটার | মান (২৫ টার্ন) | মান (৪০ টার্ন) |
|---|---|---|
| আইটেম নাম | MF4005-V2 | MF4005-V2 |
| টার্ন | 25 | 40 |
| রেটেড ভোল্টেজ | 12V | 12V |
| সর্বাধিক গতি | 2390RPM | 1300RPM |
| রেটেড টর্ক | 0.07 N.m | 0.06 N.m |
| রেটেড স্পিড | 1600RPM | 700RPM |
| রেটেড কারেন্ট | 1.44A | 0.81A |
| ম্যাক্স পাওয়ার | 14W | 4.6W |
| ম্যাক্স টর্ক | 0.25 N.m | 0.12 N.m |
| স্পিড কনস্ট্যান্ট | 133 rpm/V | 58 rpm/V |
| টর্ক কনস্ট্যান্ট | 0.05 N.m/A | 0.07 N.m/A |
| ওয়াইন্ডিং টাইপ | Y | Y |
| ফেজ রেজিস্ট্যান্স | 1.9Ω | 4.3Ω |
| ফেজ ইন্ডাকট্যান্স | 0.5mH | 1.2mH |
| মোটর পোল | ২৬ | ২৬ |
| রোটর জড়তা | ৫৬ gcm² | ৫৬ gcm² |
| মোটর তাপমাত্রা | হ্যাঁ | হ্যাঁ |
| বেয়ারিং রেটেড লোড | ১৪০N | ১৪০N |
| মোটর ওজন | ৬৫g | ৬৫g |
| প্রস্তাবিত ড্রাইভ | DF40V2 | DF40V2 |
| ড্রাইভ ইনপুট ভোল্টেজ | ৭.৪-৩২V | ৭.4-32V |
| যোগাযোগ | RS485 অথবা CAN | RS485 অথবা CAN |
| যোগাযোগ ফ্রিকোয়েন্সি | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| এনকোডার | 18বিট ম্যাগনেটিক এনকোডার | 18বিট ম্যাগনেটিক এনকোডার |
| এনকোডার বডরেট (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| বডরেট (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| নিয়ন্ত্রণ মোড | টর্ক লুপ (24KHz) / স্পিড লুপ (8KHz) / পজিশন লুপ (8KHz) | টর্ক লুপ (24KHz) / স্পিড লুপ (8KHz) / পজিশন লুপ (8KHz) |
| ত্বরিত বক্রতা | ট্রাপিজয়েড ত্বরিত | ট্রাপিজয়েড অ্যাক্সেলেশন |
ইন্টারফেস সংজ্ঞা
আইডি সুইচ: আইডি সুইচ
| ইন্টারফেস | নোট |
|---|---|
| এ/এল | আরএস485-এ অথবা কান-এল |
| বি/এইচ | আরএস485-বি অথবা কান-এইচ |
| ভি+ | পজিটিভ পাওয়ার সাপ্লাই |
| ভি+ | পজিটিভ পাওয়ার সাপ্লাই |
| ভি- | নেগেটিভ পাওয়ার সাপ্লাই |
| ভি- | নেগেটিভ পাওয়ার সাপ্লাই |
| টি | ইউএআরটি ট্রান্সমিটার |
| আর | ইউএআরটি রিসিভার |
| জি | সিগন্যাল জিএনডি |
প্রি-সেলস বা ইন্টিগ্রেশন সমর্থনের জন্য (আরএস485/কান সেটআপ, বাউড রেট নির্বাচন, এবং সিএডি ফাইল), যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
ম্যানুয়াল / ফাইল
বিস্তারিত

এমএফ4005‑V2 মোটর, এনকোডার এবং ড্রাইভ বৈশিষ্ট্যগুলি একত্রিত করে কমপ্যাক্ট রোবোটিক্স নির্মাণের জন্য, একটি আপগ্রেড করা 18-বিট ম্যাগনেটিক এনকোডার এবং CAN/RS485 যোগাযোগের বিকল্প সহ।
একটি একত্রিত, হালকা নির্মাণ ড্রাইভ ইলেকট্রনিক্সকে মোটর অ্যাসেম্বলির সাথে সংযুক্ত করে সঠিক নিয়ন্ত্রণ এবং উচ্চ টর্ক আউটপুট সমর্থন করে।
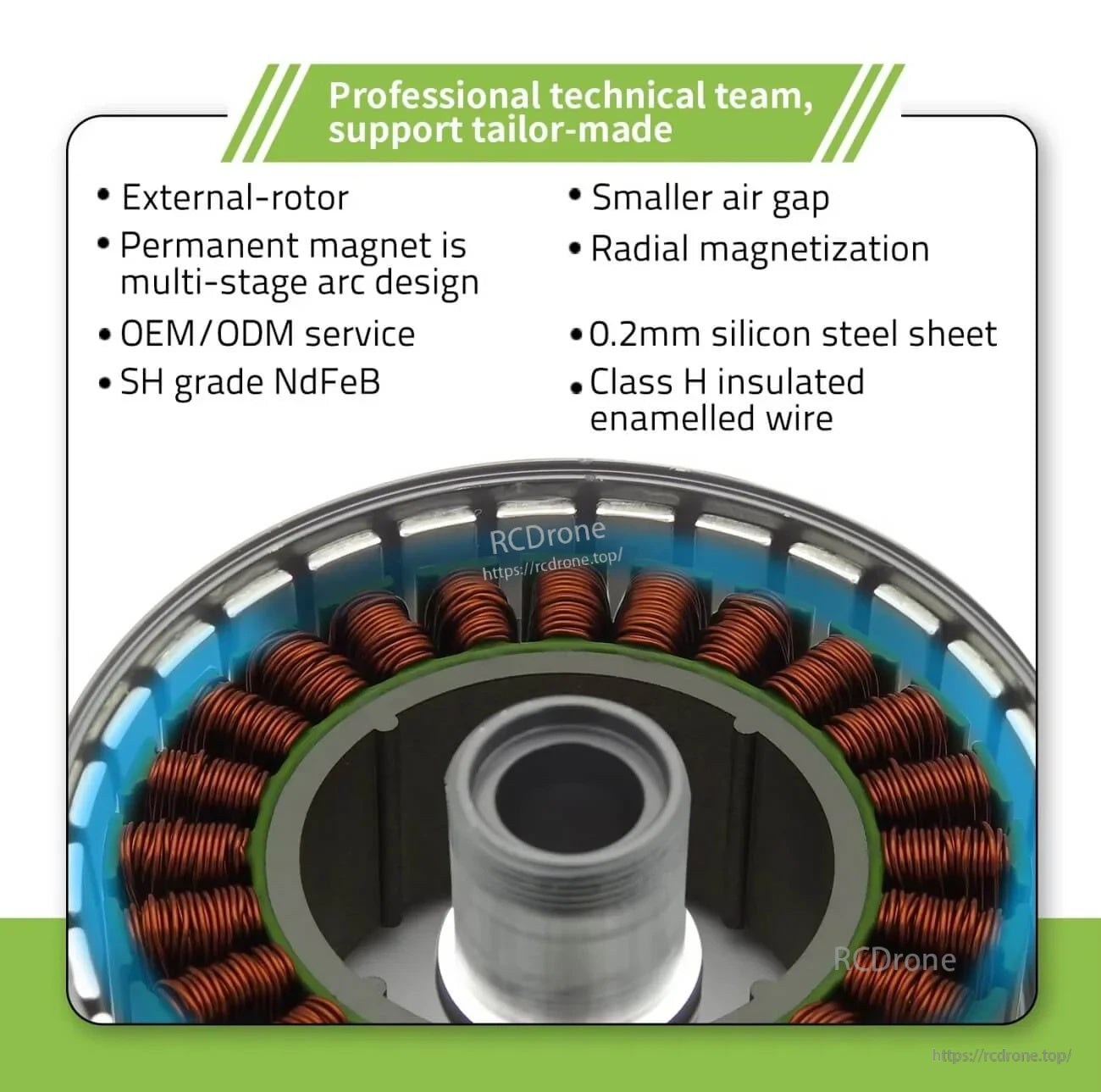
বাহ্যিক-রোটর ডিজাইন এবং ঘন উইন্ডিং লেআউট আকার, প্রতিক্রিয়া এবং টর্কের মধ্যে ভারসাম্য রাখতে সাহায্য করে রোবোটিক জয়েন্ট এবং অ্যাকচুয়েটরের জন্য।
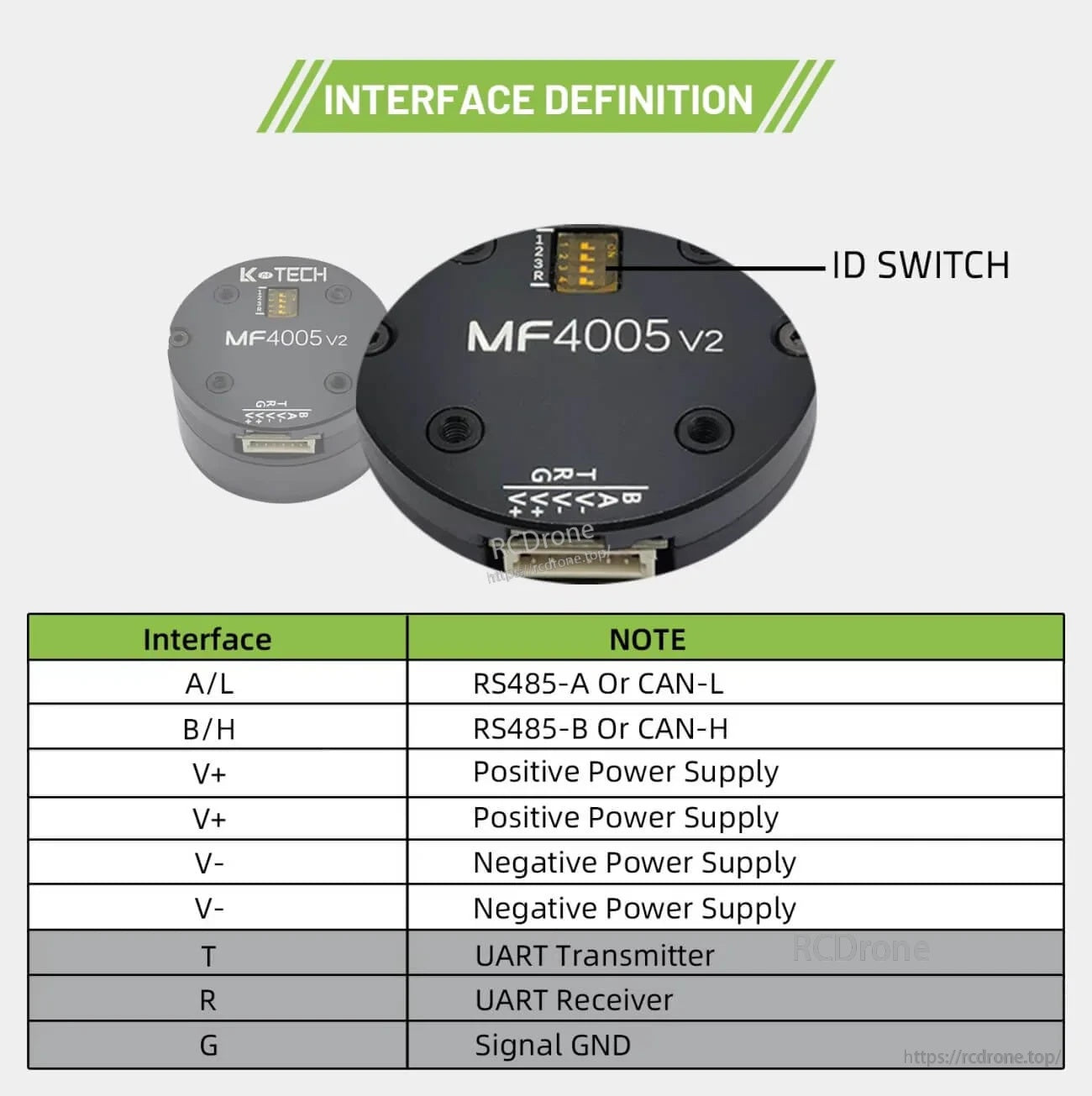
RS485 বা CAN ব্যবহার করে বাস সেটআপের জন্য একটি স্পষ্টভাবে লেবেলযুক্ত সংযোগকারী এবং আইডি সুইচের সাথে তারগুলি সহজ করা হয়েছে।
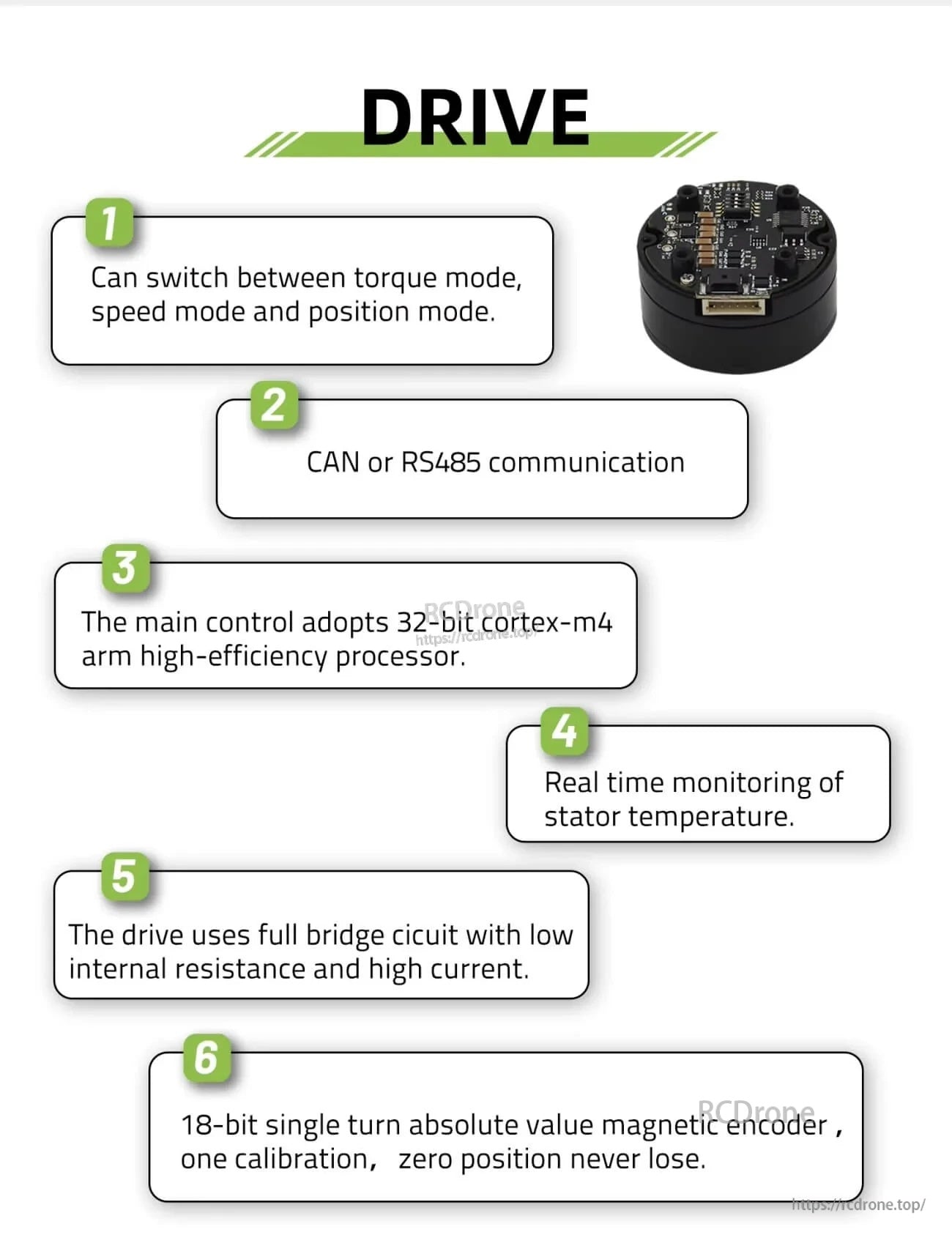
ড্রাইভের ক্ষমতাগুলির মধ্যে নির্বাচনী টর্ক, গতি এবং অবস্থান মোড অন্তর্ভুক্ত রয়েছে, পাশাপাশি CAN বা RS485 এর মাধ্যমে বাস্তব-সময়ের স্টেটর তাপমাত্রা পর্যবেক্ষণ।
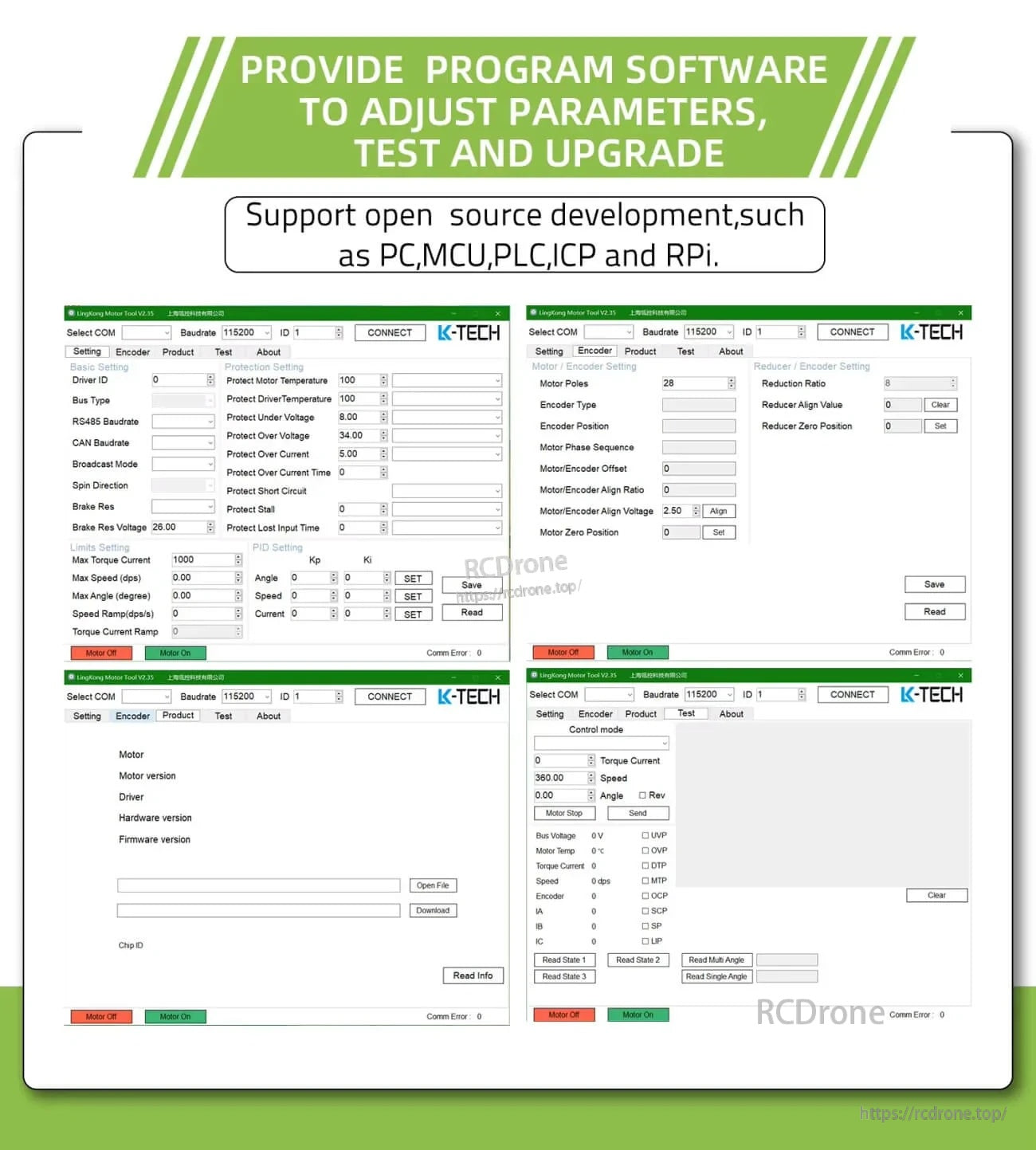
পিসি সফটওয়্যার সমর্থন প্যারামিটার টিউনিং, পরীক্ষণ এবং আপগ্রেডে সহায়তা করে, উন্নয়ন কর্মপ্রবাহের জন্য উপযুক্ত বিকল্পগুলির সাথে।
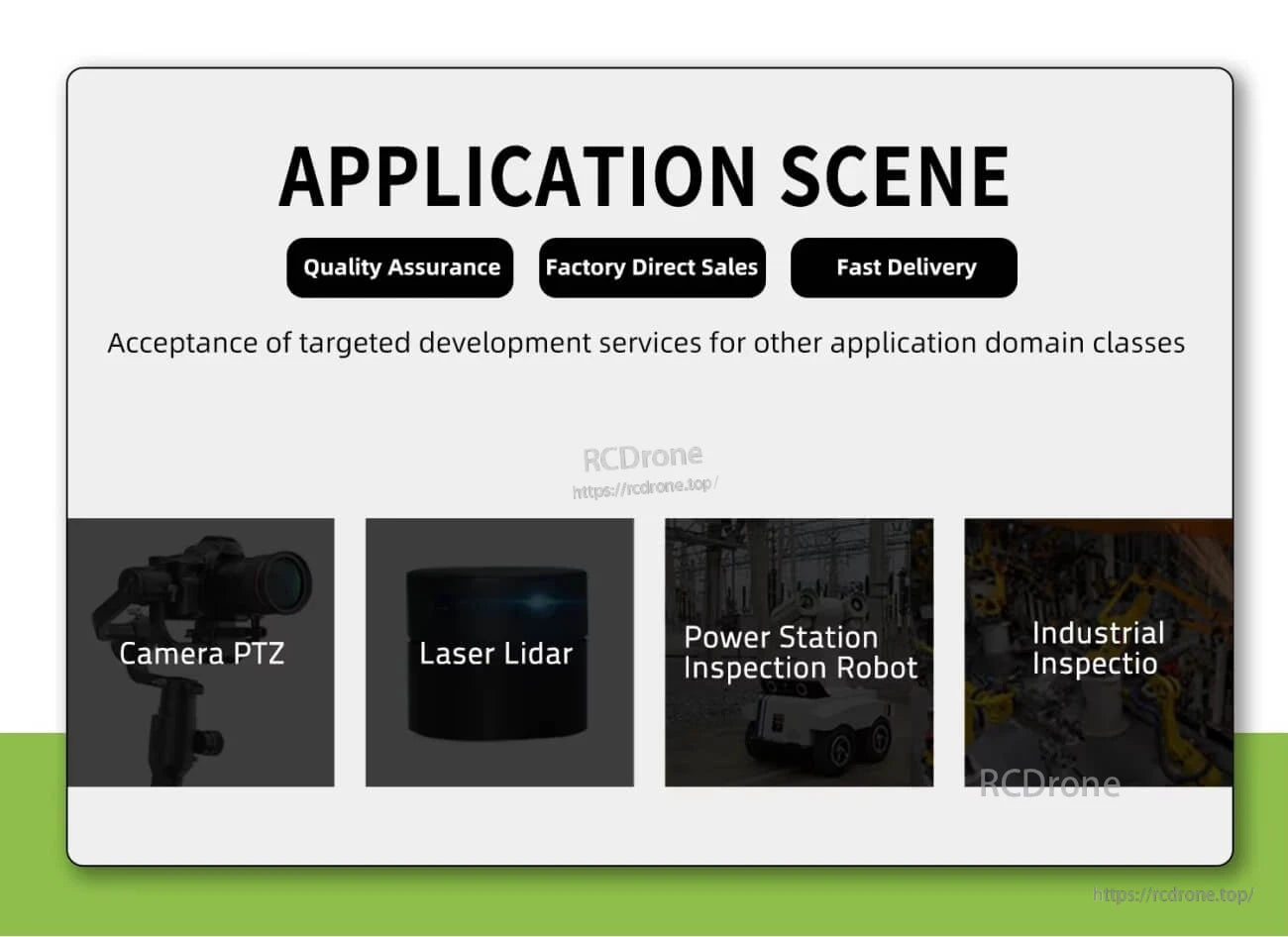
সাধারণ অ্যাপ্লিকেশন ক্ষেত্রগুলির মধ্যে রয়েছে পিটিজেড ক্যামেরা হেড, লিডার সিস্টেম এবং শিল্প পরিবেশে ব্যবহৃত পরিদর্শন রোবট।
Related Collections



