



LKMTECH MF7010-V2 মোটর ২৪ভি (২৩টি/৪৫টি) RS485/CAN ১৮-বিট এনকোডার, রোবটের জন্য DF70V2 ড্রাইভ
LKMTECH MF7010-V2 মোটর ২৪ভি (২৩টি/৪৫টি) RS485/CAN ১৮-বিট এনকোডার, রোবটের জন্য DF70V2 ড্রাইভ
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
এটি LKMTECH MF7010-V2 মোটর রোবোটিক্স এবং অটোমেশন জয়েন্টের জন্য একটি মোটর, যা RS485 বা CAN যোগাযোগ (প্রস্তাবিত DF70V2 ড্রাইভ সহ) এবং একটি একীভূত চৌম্বক এনকোডার অফার করে। এটি দুটি উইন্ডিং বিকল্পে নির্দিষ্ট করা হয়েছে (২৩ টার্ন / ৪৫ টার্ন), উভয়ই ২৪V এ রেট করা হয়েছে, মোটর তাপমাত্রা সমর্থন এবং একটি ১৮-বিট চৌম্বক এনকোডার সহ।
মূল বৈশিষ্ট্য
- যান্ত্রিক-ইলেকট্রিক্যাল একীকরণের সাথে একীভূত ডিজাইন
- উচ্চ নিয়ন্ত্রণ সঠিকতা (১৪-বিট চৌম্বক এনকোডার বৈশিষ্ট্য উপাদানে উল্লেখ করা হয়েছে)
- উচ্চ কর্মক্ষমতা RbFeB স্থায়ী চুম্বক সহ উচ্চ টর্ক আউটপুট (বৈশিষ্ট্য উপাদানের শব্দ)
- এয়ারস্পেস অ্যালুমিনিয়াম অ্যালোয়ের সমতল ডিজাইনের সাথে হালকা ডিজাইন (বৈশিষ্ট্য উপাদানের শব্দ)
- বাহ্যিক-রোটর ডিজাইন
- স্থায়ী চুম্বক মাল্টি-স্টেজ আর্ক ডিজাইন
- ছোট বায়ু ফাঁক; রেডিয়াল চুম্বকায়ন
- 0.2 মিমি সিলিকন স্টিল শীট
- ক্লাস H ইনসুলেটেড এনামেলড ওয়্যার
- SH গ্রেড NdFeB (ফিচার মেটেরিয়াল ওয়ার্ডিং)
- প্যারামিটার সমন্বয়, পরীক্ষা এবং আপগ্রেড করার জন্য প্রোগ্রাম সফটওয়্যার প্রদান করা হয়েছে; PC, MCU, PLC, ICP এবং RPi এর মতো ওপেন সোর্স ডেভেলপমেন্ট সমর্থন করে
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- AGV যানবাহন
- ARU রোবট
- ক্যামেরা PTZ
- লেজার LiDAR সিস্টেম
- পাওয়ার স্টেশন পরিদর্শন রোবট
- শিল্প পরিদর্শন সরঞ্জাম
স্পেসিফিকেশন
| প্যারামিটার | MF7010-V2 (23 টার্ন) | MF7010-V2 (45 টার্ন) |
|---|---|---|
| আইটেম নাম | MF7010-V2 | MF7010-V2 |
| টার্ন | 23 | 45 |
| Rated Voltage | ২৪ভি | ২৪ভি |
| সর্বাধিক গতি | ১২৩০ আরপিএম | ৬২০ আরপিএম |
| রেটেড টর্ক | ০.61 N.m | 0.63 N.m |
| রেটেড স্পিড | 940 RPM | 400 RPM |
| রেটেড কারেন্ট | 3.3 A | 1.75 A |
| ম্যাক্স পাওয়ার | 104 W | 31 W |
| ম্যাক্স টর্ক | 2 N.m | 2.1 N.m |
| স্পিড কনস্ট্যান্ট | 39 rpm/V | 16.7 rpm/V |
| টর্ক কনস্ট্যান্ট | 0.18 N.m/A | 0.36 N.m/A |
| ওয়াইন্ডিং টাইপ | Y | Y |
| ফেজ রেজিস্ট্যান্স | 0.71 ohm | 2.73 ohm |
| ফেজ ইন্ডাকট্যান্স | 0.86 mH | 3.3 mH |
| মোটর পোল | 28 | 28 |
| রোটর জড়তা | 748 gcm^2 | 748 gcm^2 |
| মোটর তাপমাত্রা | হ্যাঁ | হ্যাঁ |
| বেয়ারিং রেটেড লোড | 330 N | 330 N |
| মোটর ওজন | 278 g | 278 g |
| প্রস্তাবিত ড্রাইভ | DF70V2 | DF70V2 |
| ড্রাইভ ইনপুট ভোল্টেজ | 7.4-32V | 7.৪-৩২ভি |
| যোগাযোগ | আরএস৪৮৫ অথবা কান | আরএস৪৮৫ অথবা কান |
| যোগাযোগ ফ্রিকোয়েন্সি | আরএস৪৮৫: ৫০০ হার্জ (১১৫২০০ বিট প্রতি সেকেন্ড) / কান: ২ কিলোহার্জ (১ মেগাবিট প্রতি সেকেন্ড) | আরএস৪৮৫: ৫০০ হার্জ (১১৫২০০ বিট প্রতি সেকেন্ড) / কান: ২ কিলোহার্জ (১ মেগাবিট প্রতি সেকেন্ড) |
| এনকোডার | ১৮-বিট চৌম্বক এনকোডার | ১৮-বিট চৌম্বক এনকোডার |
| এনকোডার বাউডরেট (আরএস৪৮৫) | ৯৬০০, ১৯২০০, ৫৭৬০০, ১১৫২০০, ২৩৪০০, ৪০৬৮০০, ১ মেগাবিট, ২ মেগাবিট | ৯৬০০, ১৯২০০, ৫৭৬০০, ১১৫২০০, ২৩৪০০, ৪০৬৮০০, ১ মেগাবিট, ২ মেগাবিট |
| বাউডরেট (কান) | ১০০কে, ১২৫কে, ২৫০কে, ৫০০কে, ১এম | ১০০কে, ১২৫কে, ২৫০কে, ৫০০কে, ১এম |
| নিয়ন্ত্রণ মোড | টর্ক লুপ (২৪ কিলোহার্জ) / স্পিড লুপ (৮ কিলোহার্জ) / পজিশন লুপ (৮ কিলোহার্জ) | টর্ক লুপ (২৪ কিলোহার্জ) / স্পিড লুপ (৮ কিলোহার্জ) / পজিশন লুপ (৮ কিলোহার্জ) |
| ত্বরক বক্রতা | ট্র্যাপিজয়েড ত্বরণ | ট্র্যাপিজয়েড ত্বরণ |
ম্যানুয়াল
পূর্ব-বিক্রয় সামঞ্জস্য প্রশ্নের জন্য (ড্রাইভ নির্বাচন, RS485/CAN সেটআপ, বডরেট কনফিগারেশন) অথবা ডকুমেন্টেশন সহায়তার জন্য যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/ .
বিস্তারিত
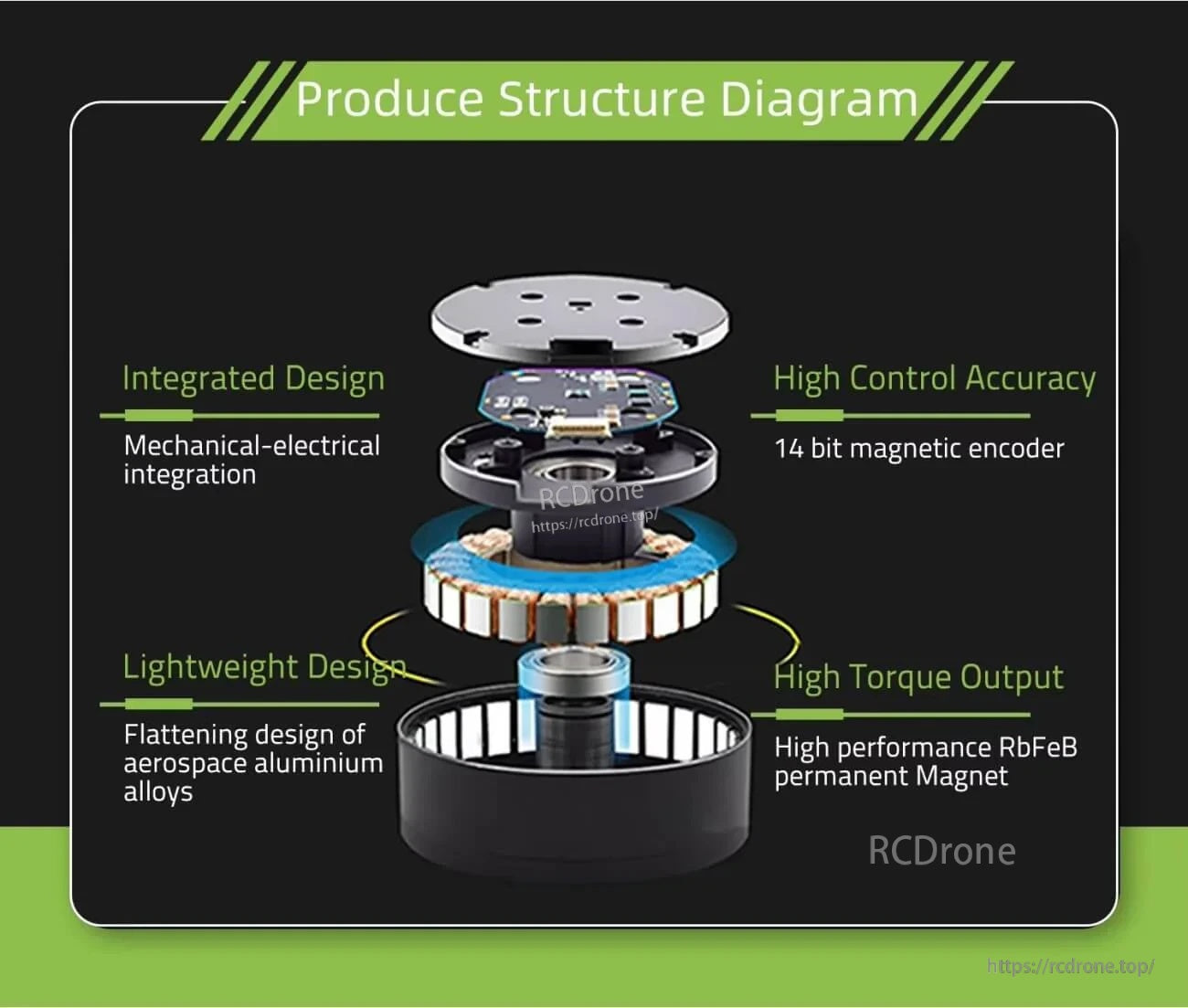
একীভূত যান্ত্রিক-ইলেকট্রিক নির্মাণ অ্যাকচুয়েটরকে কমপ্যাক্ট রাখে এবং রোবট জয়েন্টের জন্য সঠিক ক্লোজড-লুপ নিয়ন্ত্রণ সমর্থন করে।
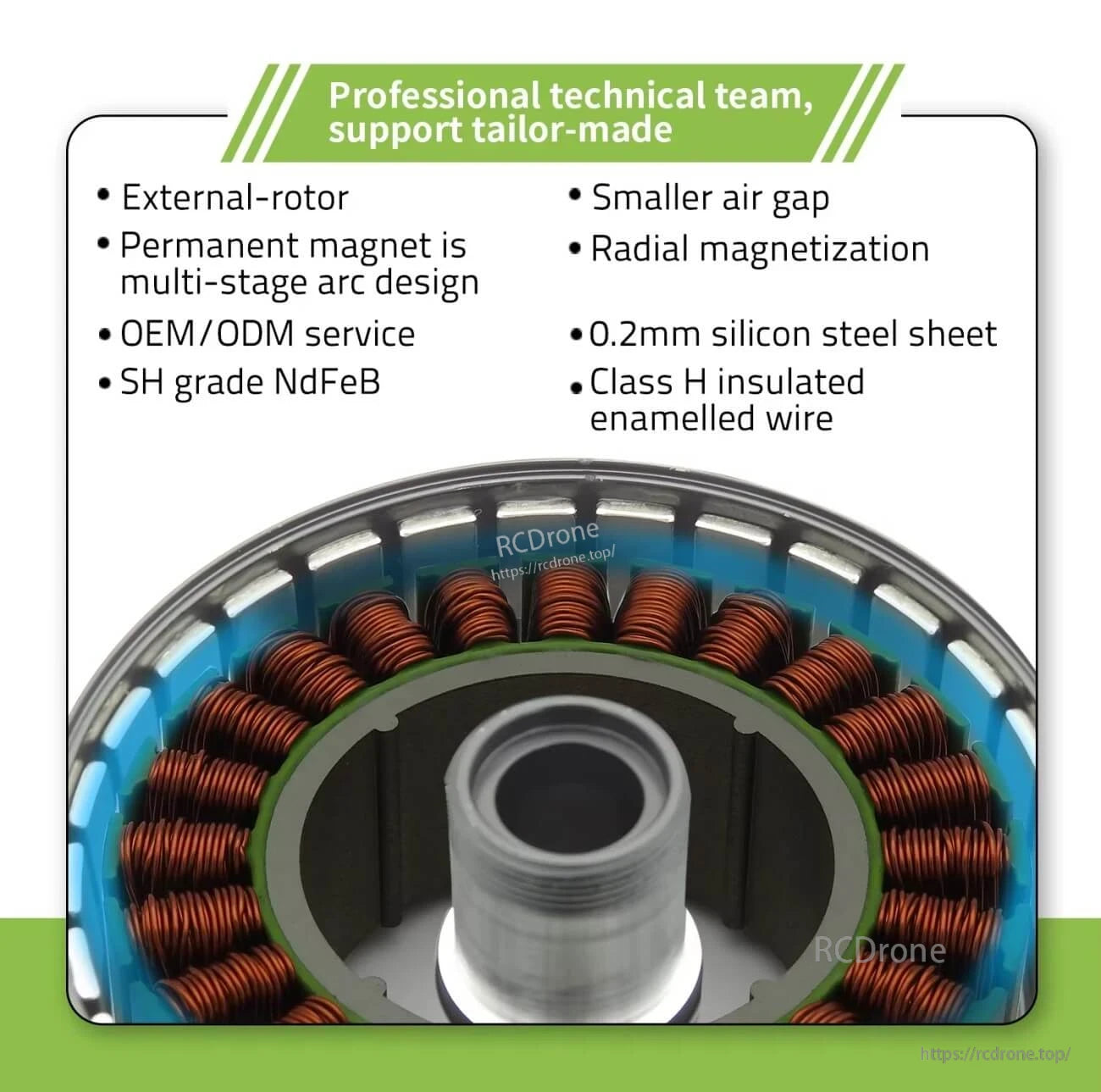
বাহ্যিক-রটার লেআউট এবং সংকীর্ণ এয়ার-গ্যাপ ডিজাইন একটি হালকা ওজনের জয়েন্ট মোটর ফরম্যাটে প্রতিক্রিয়াশীল টর্ক সরবরাহ করতে সহায়তা করে।
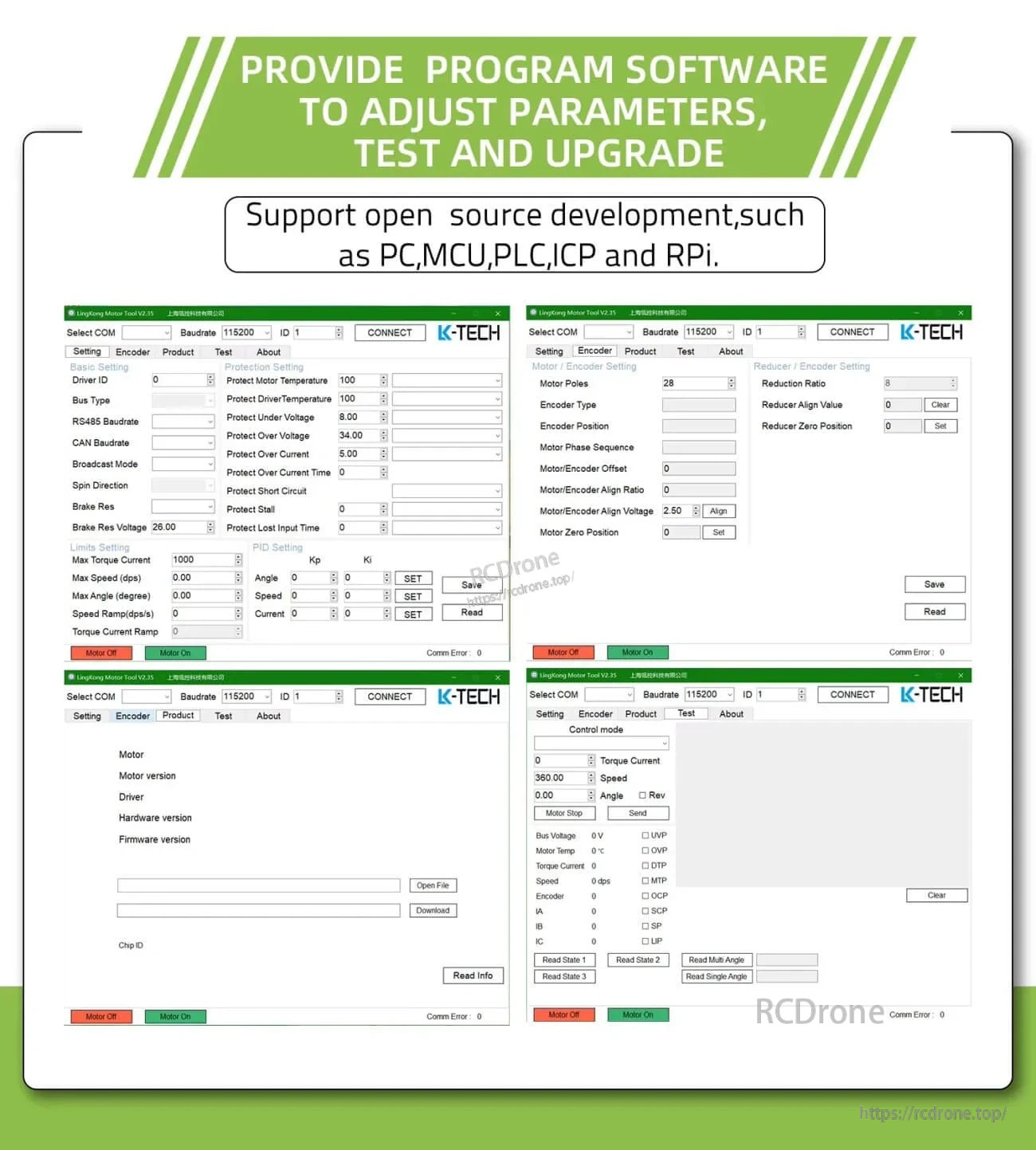
পিসি সফটওয়্যার প্যারামিটার সেটআপ, ডায়াগনস্টিকস এবং ফার্মওয়্যার আপগ্রেডের জন্য উপলব্ধ যখন এটি সুপারিশকৃত DF70V2 ড্রাইভের সাথে ব্যবহৃত হয়।

Related Collections



